Материал: ТММ в_авиастроении
|
|
D = |
|
|
C + |
|
|
|
DCn |
+ |
|
|
τDC; |
|
|
|
|
|
|
|
|
|
|
|
(3.41) |
||||||||||
|
W |
W |
W |
W |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
(3.42) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
WD = WO5 + WDO5 + WDO5 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Решая совместно, получим: |
|
c + |
|
DCn |
+ |
|
τDC |
= |
|
DOn |
5 + |
|
τDO5 . |
||||||||||||||||||||||
W |
W |
W |
W |
W |
|||||||||||||||||||||||||||||||
Здесь: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
V2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
WDCn |
= |
|
|
|
DC |
= ω42lDC; |
|
|
|
|
|
|
|
|
|
|
|
(3.43) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
lDC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
V2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
WDOn |
5 = |
|
D |
= ω52lDO5 . |
|
|
|
|
|
|
|
|
|
|
|
(3.44) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
lDO5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
12.Определяем угловые ускорения звеньев 2, 3, 4 и 5.
|
|
Wτ |
Wτ |
Wτ |
WDOτ |
|
|||||
ε2 |
= |
BA2 |
;ε3 = |
BO3 |
; ε4 = |
DC |
;ε5 = |
5 |
. |
(3.45) |
|
|
|
||||||||||
|
|
||||||||||
|
|
lBA |
lBO3 |
lDC |
lDO5 |
|
|||||
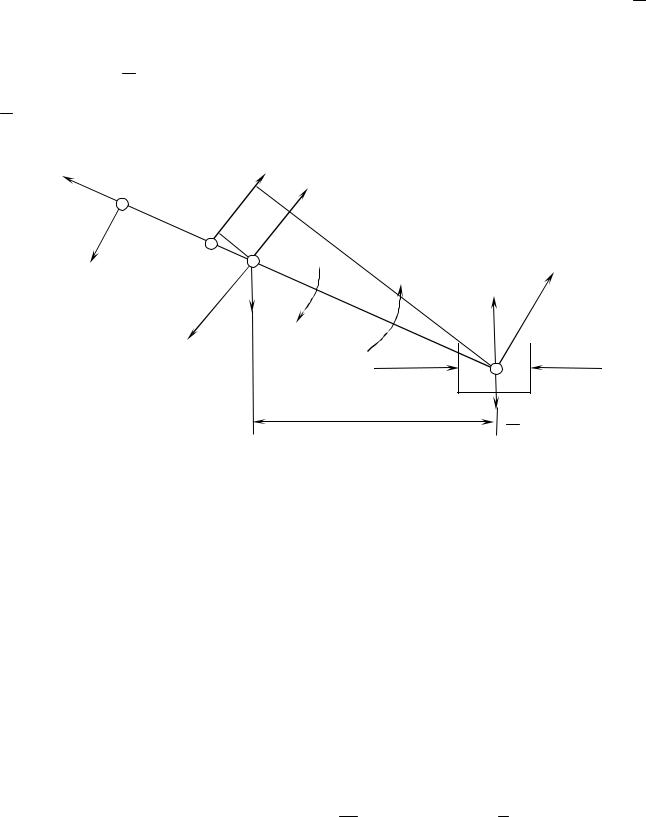
3.7. Определение скоростей и ускорений в кулисных механизмах
Пример 3. Рассмотрим построение планов скоростей и ускорений кулисного механизма (Рис. 3.3 а). Дано: ω1 = const, lO1A1 , lO1O3 .
Определяем скорость точки А1 звена 1:
VA1 = ω1lO1A. |
|
|
|
|
|
(3.46) |
||||||||||||||||||
Скорость точки А3 звена О3В можно определить из векторного уравнения: |
||||||||||||||||||||||||
|
|
|
|
|
|
|
A3 |
|
+ |
|
|
|
A1A3 |
|
|
|||||||||
|
V |
A1 = |
V |
|
|
V |
(3.47) |
|||||||||||||||||
|
|
|
|
|
|
O3A3 |
|
|
|
|
O3A3 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
Определяем ускорение точки А1 звена 1: |
|
|||||||||||||||||||||||
W |
= ω2l |
O1A |
. |
|
|
|
|
|
|
|
|
|
|
(3.48) |
||||||||||
|
|
A1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Для определения ускорения точки А3 звена 3 составляется векторное |
||||||||||||||||||||||||
уравнение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
= |
|
A3 |
+ |
|
|
Ar |
1A3 |
+ |
|
AK1A3 , |
|
|||||||||
|
W A1 |
|
W |
W |
W |
(3.49) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O3A3 |
|
|
|
|||||
36
где: WAKA |
|
|
= 2ω3VA A ; ω3 = |
VA3 |
. |
||||||||||||||||||||
3 |
|
|
|
||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
3 |
|
|
|
|
|
|
lO3A3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Но |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
A3 = |
|
|
O3 + |
|
|
An 3O3 + |
|
|
τA3O3 , |
||||||||||||||
|
W |
W |
W |
W |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
O3A3 |
|
|
|
O3A3 |
|
|||||||||
|
|
|
|
|
|
|
|
|
V2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
где: WAn |
|
|
= |
|
A3 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
3O3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
lO3A |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
|
|
а) |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О1 |
|
|
|
|
ω1 |
3 |
|
|
|
A1,A2,A3 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e3
O3 ω3
ω3
(3.50)
б)
р
а3
b
в в) |
а1 |
а |
|
|
ρ |
k |
n3 |
|
а1
Рис. 3.3. Кинематическое исследование кулисного механизма методом планов: а – кинематическая схема; б – план скоростей; в – план ускорений.
|
|
= |
|
|
An 3O3 + |
|
τA3O3 |
+ |
|
|
Ar 3O3 |
+ |
|
AK1A3 . |
|
||
WA1 |
W |
W |
W |
W |
(3.51) |
||||||||||||
|
|
|
|
|
|
|
O3A3 |
|
|
O3A3 |
|
|
|
|
|||
O1A1 |
|
|
O3A3 |
|
|
|
|
O3A3 |
|
||||||||
|
|
|
|
|
|
||||||||||||
Скорость и ускорение точки B звена O3B определяются по теореме подобия.
37
4. Кинетостатический (силовой) расчёт плоских
механизмов с низшими парами
4.1. Общие сведения
При решении задач силового расчета механизмов предполагаются известными закон движения входного звена, массы и моменты инерции звеньев механизма. Таким образам, всегда могут быть определены те силы инерции, которые необходимы для решения задач силового расчета с помощью уравнений равновесия.
Кинетостатика механизмов занимается решением двух задач: определением усилий (реакций) в кинематических парах; определением так называемых уравновешивающих сил.
Без знания сил, найденных путем кинетостатического расчета, нельзя рассчитывать детали машин на прочность и износ, подбирать подшипники, определять необходимую мощность и коэффициент полезного действия. В качестве примера приведем силовой расчет шестизвенного механизма с входным звеном 1, показанного на рис. 2.1, с известными массами звеньев m и силой полезного сопротивления FC . Силы полезного сопротивления FC может быть задана численным значением, либо индикаторной диаграммой, либо механической характеристикой.
Индикаторная диаграмма представляет собой графическую зависимость силы
38

полезного сопротивления или давления на поршень от его положения.
Если задана индикаторная диаграмма двигателя внутреннего сгорания, то по
заданному положению поршня определяем давление на поршень |
|
H |
|
|
|
||
pi |
|
|
|
, затем |
|||
мм |
2 |
||||||
|
|
|
|
|
|
|
|
определяется движущая сила или сила полезного сопротивления |
по |
формуле |
|||||
F = pi A , где A = |
πD2 |
– площадь поршня (мм2). |
|
|
|
|
|
4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Для механизма воздушного компрессора силу полезного сопротивления FC [H]
можно определить непосредственно из индикаторной диаграммы, зная положение поршня.
Механическая характеристика представляет собой графическую зависимость момента, приложенного к входному валу рабочей машины от угловой скорости этого вала.
Кинетостатический расчет механизма начинают с группы Ассура, наиболее удаленной от входного звена, и проводят его последовательно согласно формуле строения 1 → 221 (2, 3) → 222 (4, 5).
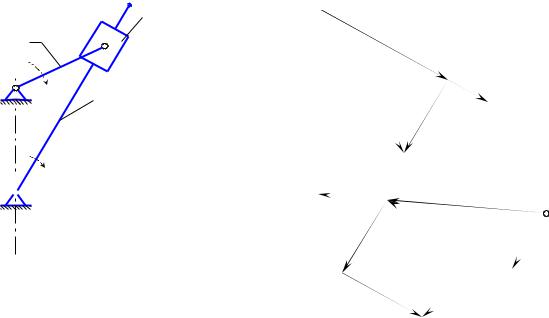
4.2. Силовой расчет групп Ассура
Рассмотрим расчет группы 222 (звеньев 4, 5). Силы тяжести G4 и G5 звеньев 5 и 4 приложены в центрах тяжести в точках D и S4 и направлены вертикально вниз. Так как группы Ассура являются статически определяемыми кинематическими цепями, то, применяя принцип Даламбера, согласно которому, если к действующей на группу системе внешних и внутренних сил добавить силы инерции, то такую систему можно рассматривать в равновесии, сводим задачу динамики к задаче статики. Рассматриваемая группа освобождена от связей. Вместо них надо приложить соответствующие реакции: R05 – реакцию, действующую в поступательной паре со стороны стойки на звено 5 и R34 – реакцию, действующую в шарнире С со стороны звена 3 на звено 4. Реакция R05 не известна по величине,
39
но известна по направлению – перпендикулярно направляющей X. Реакция R34 –
неизвестна ни по величине, ни по направлению. Поэтому разложим ее на две составляющие Rτ34 – тангенциальную, направленную перпендикулярно звену CD и R34n – нормальную, направленную вдоль звена CD (рис. 4.1).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
F′u4 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
n |
|
|
|
|
|
|
|
Fu4 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
R34 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
K4 |
h4 |
|
|
|
|
hF |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
S4 |
|
|
|
|
|
|
τ |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
τ |
|
|
|
|
|
|
|
WДС |
||||||||||||
|
|
R34 |
|
|
|
|
|
|
|
|
|
|
|
ε4 |
R05 |
|
|
|
|
||||
|
|
|
|
|
|
|
G4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tu4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fc |
|||
|
|
|
|
|
|
|
|
|
|
Fu5 |
|
|
|
|
|
||||||||
|
|
|
|
|
u4 |
|
|
|
|
|
|
|
|
Д |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
b
G5
Рис. 4.1. Схема к силовому расчету группы Асура второго вида
Для того, чтобы написать условия равновесия для группы 222, необходимо приложить к ней силы инерции. Величина силы инерции звена 5 определяется по
формуле |
|
|
|
|
|
|
||||
Fu5 = m5WD , |
|
|
|
|
|
(4.1) |
||||
где m5 – масса звена 5; |
|
|
|
|
|
|
||||
WD – полное ускорение точки D, м/с2; W |
|
|
|
|
||||||
= |
πd |
µ |
W |
. |
(4.2) |
|||||
|
|
|
|
D |
|
|
|
|
|
|
|
|
– взято из плана ускорений; |
|
|
|
|
|
|
||
πd |
|
|
|
|
|
|
||||
Сила инерции |
|
|
D ползуна 5 и |
направлена |
||||||
Fu5 приложена к точке |
||||||||||
противоположно направлению ускорения WD . Сила инерции Fu4 звена 4 приложена в центре тяжести S4 и равна по величине
Fu 4 = m4WS4 . |
(4.3) |
Центр тяжести S4 звена 4 находится на расстоянии lCS4 |
На основании |
40 |
|