Материал: ТММ в_авиастроении
относительного ускорения WBO3 . И, наконец, вектор πb выражает на плане ускорений вектор абсолютного ускорения точки B.
Для определения ускорения точки C воспользуемся свойством подобия. На основании теоремы подобия имеем
|
|
|
|
|
= ( |
|
|
|
|
|
) |
|
. |
|
|
|
|
||||
|
|
|
πc |
O3C |
BO3 |
πb |
|
||||||||||||||
|
|
|
Тогда WC = |
|
µw . |
|
|||||||||||||||
|
|
|
πc |
|
|||||||||||||||||
|
|
|
Для определения ускорения точки D напишем векторное уравнение |
|
|||||||||||||||||
|
|
|
WD = WC + WnDC + WτDC. |
(3.20) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Рассмотрим векторы, входящие в данное уравнение. Вектор WC мы |
||||||||||||||||||
определили ранее. Величина вектора |
|
DCn , м/с2 , определяется по формуле |
|
||||||||||||||||||
W |
|
||||||||||||||||||||
|
|
|
|
|
DCn = VDC2 l DC , |
(3.21) |
|||||||||||||||
|
|
|
|
W |
|||||||||||||||||
|
|
|
а остальные векторы известны только по направлению. |
|
|||||||||||||||||
|
|
|
Достраиваем план ускорений. Из точки С параллельно звену DС проводим |
||||||||||||||||||
|
|
|
|
|
|
|
|
DCn , масштабная величина которого, мм, на плане ускорений |
|
||||||||||||
вектор |
|
|
W |
равна |
|||||||||||||||||
|
|
|
Wn |
|
|||||||||||||||||
|
|
|
|
||||||||||||||||||
cn4 = |
|
|
DC |
. |
|
||||||||||||||||
|
|
|
|
||||||||||||||||||
|
|
|
|
|
µW |
|
|||||||||||||||
Через точку n4 проводим линию перпендикулярно звену СD, а через точку π линию параллельно направляющей x − x . На пересечении этих линий получим точку d . Полученный вектор n4d на плане ускорений выражает в масштабе ускорений WτDC , а вектор πd является изображением вектора WD . Тогда
WD = πd µW .
Если соединить точку c с точкой d , то вектор cd будет изображать полное относительное ускорение WDC .
Определим угловые ускорения. Ведущее звено 1 вращается с постоянной угловой скоростью. Поэтому его угловое ускорение ε1 = 0.
Угловое ускорение звена 2, с-2 находится по формуле
31
|
Wτ |
n |
b |
µ |
W |
|
|
||
ε2 = |
BA |
= |
|
2 |
|
|
. |
(3.22) |
|
|
|
|
|
|
|
||||
|
lBA |
|
lBA |
|
|
|
|||
Чтобы определить направление углового ускорения ε2 , вектор относительного ускорения WτBA следует перенести с плана ускорений в точку B механизма, а точку A мысленно закрепить. Тогда вектор WτBA будет стремиться вращать звено 2 против хода часовой стрелки. Это и будет направление ε2 . Вектор ε2 будет направлен перпендикулярно плоскости движения звена AB так, чтобы с конца вектора ε2
направление вращения вектора WτBA относительно точки A было против хода часовой стрелки.
Подобным образом находим угловые ускорения остальных звеньев:
|
|
WBOτ |
|
|
|
|
|
|
|
|
|||||
ε3 = |
= |
n |
b |
µ |
W |
|
|
||||||||
3 |
|
|
3 |
|
|
|
; |
(3.23) |
|||||||
lBO3 |
|
|
lBO3 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
Wτ |
|
|
|
|
µ |
|
|
|
|
||||
|
|
|
n |
d |
W |
|
|
|
|||||||
ε4 = |
|
DC |
= |
|
|
3 |
|
|
|
|
. |
(3.24) |
|||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
lDC |
|
|
|
lDC |
|
|
|
|
|||||
ε3,ε4 направлены против хода часовой стрелки. Если знаки ε3 и ε4 одинаковы, то звено вращается ускоренно, если их знаки различны – замедленно.
3.6. Определение скоростей и ускорений в механизмах шасси
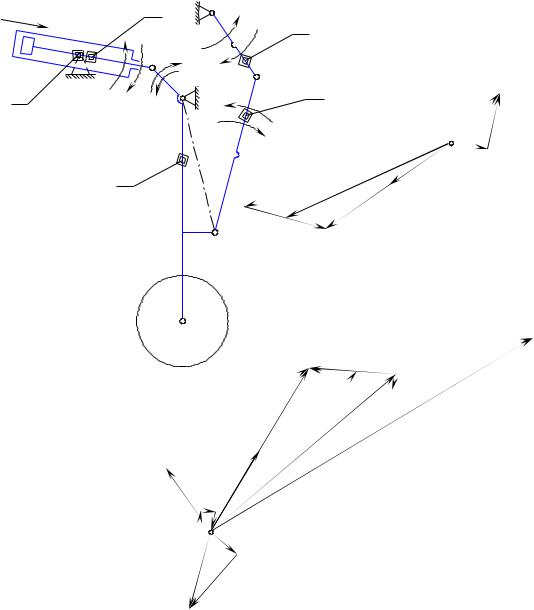
Пример 2. Рассмотрим построение планов скоростей и ускорений механизма передней стойки шасси самолета с ведущим штоком 2 (рис.3.1). Относительная скорость штока V2 = const .
Порядок расчета:
1. Построив кинематическую схему в масштабе в выпущенном и убранном положениях стойки шасси, определяется ход H поршня 2 гидроцилиндра 1.
Тогда Vr = VA2A1 = Ht ,
где t – время уборки шасси.
2.Составляем векторное уравнение скоростей:
32
|
V |
A1 = |
V |
|
|
A2 + |
V |
A1A2 . |
(3.25) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0, то |
|
||||||||
Так как VA1 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
A2A1 |
= |
|
|
r . |
(3.26) |
|||||||||||
|
V |
A2 = |
V |
V |
|||||||||||||||||||
С другой стороны с учетом (3.26) |
|
||||||||||||||||||||||
|
|
A2 = |
|
|
B + |
|
|
A2B ; |
|
||||||||||||||
|
V |
V |
V |
(3.27) |
|||||||||||||||||||
|
|
B = |
|
r + |
|
BA2 . |
(3.28) |
||||||||||||||||
|
V |
V |
V |
||||||||||||||||||||
3.Угловая скорость цилиндра 2 находится по формуле:
ω2 |
= |
VBA2 |
. |
(3.29) |
|
||||
|
|
lAB |
|
|
Направление ω2 |
соответствует вращению цилиндра против часовой стрелки. |
|||
33
V2 = const |
A2 |
|
2 |
O5 ε5 |
|
5 |
|
A1 |
ω2 |
|
S5 |
|
|
||
|
|
ω3 |
|
|
|
||
|
|
|
ω |
|
|
|
|
|
|
|
|
5 |
D |
|
b |
1 |
|
ε2 |
ε3O |
ε4 |
4 |
||
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
ω4 |
|
p O5 |
|
|
|
|
S |
|
a1O3 O2 |
|
|
|
|
|
|
|
||
|
|
3 |
|
4 |
|
|
|
|
|
|
|
|
|
S5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
S4 |
|
|
|
|
|
|
C |
|
d |
|
|
|
|
|
|
|
||
a |
|
|
|
|
|
|
б |
|
|
|
E |
|
|
|
e |
d S4 C
n4
S5
n5
в
n2 k
p O3 O5 a1
b
Рис. 3.2. Кинематическое исследование механизма шасси методом планов:
а– кинематическая схема; б – план скоростей; в – план ускорений
4.Определяем
ω = |
VB |
. |
|
|
|
|
|
|
|
(3.30) |
|||||
|
|
|
|
|
|
|
|
||||||||
3 |
|
lBO3 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Направление ω3 – по часовой стрелке. |
|
|
|||||||||||||
Скорость точки Cстойки определяется из подобия; так как ω = |
VC |
, то |
|||||||||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
lCO3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
V |
|
lCO |
3 |
|
CO |
|
|
CO |
|
|
|
|||
|
C |
|
= |
|
|
|
= |
|
3 |
; VC = VB |
|
3 . |
(3.31) |
||
|
V |
l |
|
|
|
BO |
BO |
||||||||
|
|
BO3 |
|
3 |
|
3 |
|
|
|||||||
|
BO3 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
34 |
|
|
Скорость точки D найдём из выражения:
|
|
|
= |
|
C |
+ |
|
DC . |
|
|||
|
VD |
V |
V |
(3.32) |
||||||||
DO5 |
|
|
|
|
|
|
|
DC |
||||
|
|
|
|
|
|
|
|
|||||
Тогда |
|
|
|
|
||||||||
ω4 = |
VDC |
; |
|
|
|
(3.33) |
||||||
|
|
|
|
|||||||||
|
|
|
|
l DC |
|
|
|
|
||||
ω5 = |
|
VD |
. |
|
|
|
(3.34) |
|||||
|
|
|
|
|
||||||||
lDO5
8.Составляем векторное уравнение ускорений точек цилиндра и штока:
WA1 = WA2 + WrA1A2 + WKA1A2 ,
где: WA1 = 0 и WrA1A2 = 0, так как Vr = const. Тогда WA2 = WKA2A1 .
Но
WKA2A1 = 2ω2VA2A1 = 2ω2Vr.
Для определения направления вектора WKA2A1 кориолисова ускорения необходимо вектор относительной скорости Vr повернуть на 90° в сторону переносного вращательного движения.
9.Ускорение точки B определяем из уравнений:
WB = WA2 + WnBA2 + WτBA2 ;
WB = WO3 + WnBO3 + WτBO3 ;
Решая совместно, получим : |
|
AK |
2 A1 + |
|
BAn |
2 + |
|
τBA2 = |
|
BOn |
3 + |
|
τBO3 . |
||||||||||||
W |
W |
W |
W |
W |
|||||||||||||||||||||
Здесь: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Wn |
= |
|
V2 |
|
= ω2l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BA |
|
BA |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
BA2 |
|
|
lBA |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
V2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WBO3 |
= |
|
B |
= ω3 lBO3 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
lBO3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.35)
(3.36)
(3.37)
(3.38)
(3.39)
(3.40)
10.Ускорение точки C находим из подобия аналогично определению VC .
11.Для определения ускорения точки D составляем векторные уравнения:
35