Материал: ТММ в_авиастроении
(столько же точек и на графиках). От точек деления на данной окружности вдоль радиальных лучей откладывают соответствующие перемещения из графика S = f (ϕ). Через полученные точки проводят перпендикуляры к этим радиусам. Огибающая всех построенных перпендикуляров будет профилем
кулачка. Профиль |
кулачка |
для углов |
ϕд и ϕб очерчивается дугами |
|||
окружностей с центром в точке O1 . |
|
|||||
Расстояние |
L от центра |
кулачка до направляющих ведомого звена |
||||
определяется по формуле: |
|
|
||||
L = r0 + Xmax , Xmax |
≥ h + c. |
|
||||
|
|
|
|
|
dS |
|
Длина направляющих l ≥ (0,8 1,0) dϕ max . |
||||||
|
|
|
dS |
|
||
Радиус тарелки r |
≥ |
|
. |
|
||
|
|
|||||
|
|
тар |
dϕ max |
|
||
Пример |
3. |
Проектирование |
кулачкового механизма с |
|||
вращающимся (коромысловым) роликовым толкателем
1. Проектирование начинают с построения диаграмм d2S = f (ϕ ), dϕ2
ddSϕ = f (ϕ), S = f (ϕ). (см. п. 7.3.).
Построению графиков предшествует аналитическое интегрирование (см. п. 7.2.), которое проводят на ЭВМ.
2. Для определения минимального радиуса кулачка r0 строят
dS диаграмму S = f dϕ (рис. 7.8.).
На дуге окружности радиуса O2A0 (где O2A0 = lкоромысла ) от точки A0
µS
откладывают Si – перемещение конца толкателя, соответственно заданным углам поворота кулачка. Через центр вращения O2 коромысла и полученные на дуге точки проводят радиусы. На этих лучах откладывают
151

соответствующие аналоги скорости ddSϕ , взятые с диаграммы ddSϕ = f (ϕ).
Если кулачок вращается по часовой стрелке, то аналоги скорости для угла удаления откладываются вправо, а для угла возвращения – влево. Концы аналогов скорости соединяют плавной кривой. Через концы отрезков аналогов скорости проводят прямые под углом γ min к
направлению радиуса O2 Ai и этим самым определяют область, где можно разместить центр кулачка. Минимальный радиус кулачка r0 = O1A0 µS. На диаграмме определяют ψ 0 и O1O2 .
Примечание. Диаграмма строится при условии µS = µ dS .
dϕ
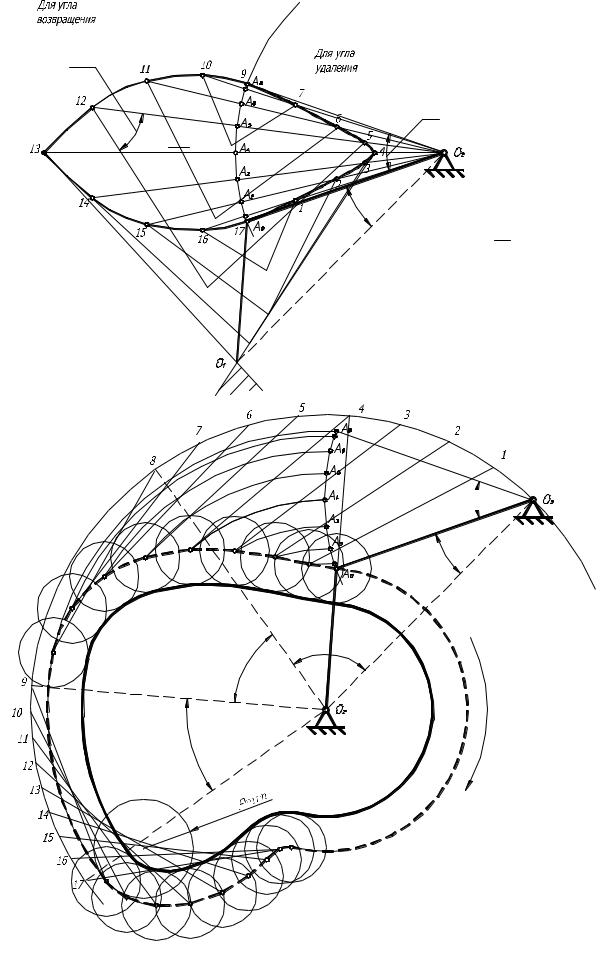
3.По найденным r0 ,lO1O2 ,ψ 0 и известным перемещениям Si строят
профиль кулачка, используя метод обращения движения (рис. 7.9.).
Из произвольно выбранной точки O1 проводят окружность радиусом O1O2 , делят её на части пропорциональные углам ϕy , ϕд , ϕв и откладывают их от точки O2 в направлении, противоположном вращению кулачка. Каждую дугу, стягивающую углы ϕy и ϕв делят на 8 равных частей. Далее из полученных точек 1,2,3 и т.д. (на окружности радиуса O1O2 ) проводят дугу
радиусом O2A0 и |
находят точки их пересечения с дугами радиусами |
O1A1, O1A2 , O1A3 |
и т.д., описанными из центра O1 вращения кулачка. |
Соединив последовательно полученные точки, строят теоретический профиль кулачка.
Для углов ϕд и ϕб теоретический профиль очерчен дугами окружностей из центра O1 .
Для построения конструктивного (практического) профиля кулачка описывают окружности радиусом rрол и строят огибающую их линию.
Для определения rрол находят методом проб участок теоретического профиля с наибольшей кривизной и описывают круг кривизны с радиусом
152
ρmin . Радиус ролика rрол ≤ 0,7ρmin или rрол ≤ 0,3r0 . Из этих двух величин
берут наименьшую.
153
S 
γ min
ψ max
dS
dϕ
ψ0
s = dS
dϕ
Рис.
 7.8.
7.8. Определение минимального радиуса кулачка
Определение минимального радиуса кулачка
ψ max 
ψ0
ϕу
ϕд
ω К
ϕв
Рис. 7.9.
 Построение
Построение профиля кулачка
профиля кулачка
154
Список использованных источников
1.Артоболевский И.И. Теория механизмов и машин. – М.: Наука,1975.
2.Авиационные зубчатые передачи и редукторы: Справочник / Под ред. Э.Б. Вулгакова. – М.: Машиностроение, 1981.
3.Болотовская Т.П., Болотовский И.А. и др. Расчет коррекции зубчатых колес с помощью блокирующих контуров. Уфа, 1969.
4.Гинзбург Е.Г. Волновые зубчатые передачи. – Л.: Машиностроение, 1969.
5.Добровольский В.В. Планетарные редукторы с замыкающей цепью. – М.: Вестник машиностроения №11, 1944.
6.Кестельман В.Н., Федоров А.В. Механизмы управления самолётом. – М.: Машиностроение, 1987.
7.Кинематическое проектирование зубчатых передач: Учебное пособие/ Савинов А.П., Кудинова Л.К., Кричевер М.Ф. Куйбышев: Куйбышевский авиационный институт, 1973.
8.Коробова Н.П., Журавлев В.Н. Синтез плоских кулачковых механизмов. – М.: Изд-во МАИ, 1992.
9.Кричевер М.Ф., Цфас Б.С. Кинематика дифференциальных механизмов с несколькими степенями подвижности. – М.: Известия высших учебных заведений №7, 1965.
10.Кулагин В.В., Бочкарев С.К., Горюнов Н.М. и др. Теория, расчет
ипроектирование авиационных двигателей и энергетических установок: Учебник, кн. 3. / Под общ. ред. В.В. Кулагина – М.: Машиностроение, 2005.
11.Основы расчета и конструирования деталей и механизмов летательных аппаратов: Учеб. пособие для втузов / Под ред. В.Н. Кестельмана и Г.И. Рощина. – М.: Машиностроение, 1989.
12.Планетарные передачи: Справочник / Под ред. В.Н. Кудрявцева и Ю.Н. Кирдяшева. – Л.: Машиностроение, 1977.
155