Материал: ТММ в_авиастроении
S |
|
|
|
|
h |
|
|
ϕ у |
ϕд |
ϕ |
ϕ |
в |
|||
|
X |
|
|
dS |
|
|
|
dϕ |
|
|
|
bу |
|
|
|
|
|
|
ϕ |
|
|
|
bв |
d 2 S |
|
dϕ 2 |
|
а у |
|
|
ϕ |
0,5ϕ у |
ав |
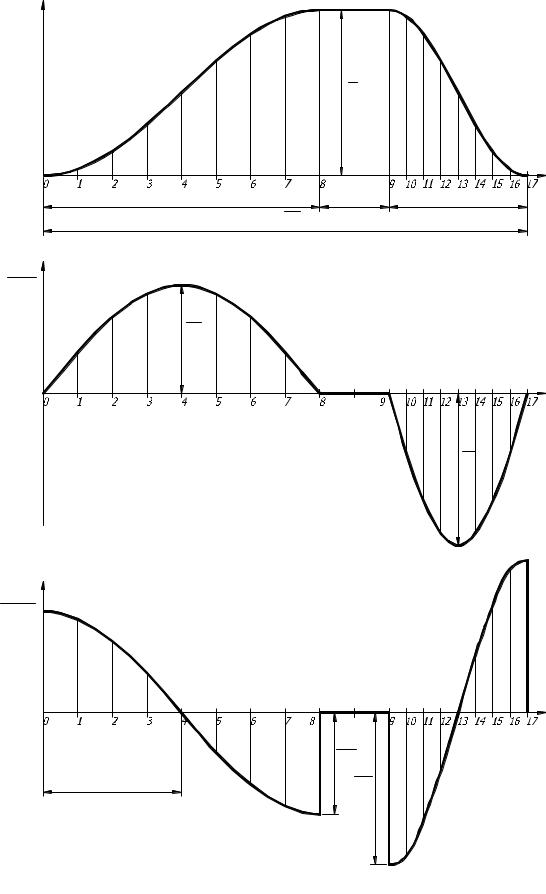
Рис. 7.2. Диаграммы перемещений, аналогов скоростей и аналогов ускорений
141

Максимальный аналог скорости будет при ϕ = 0,5ϕy :
|
|
|
V |
dS |
|
πh |
|
|
b |
y |
= |
max |
= |
|
= |
|
. |
|
|
|||||||
|
|
ω |
|
|
|
2ϕy |
||
|
|
|
dϕ max |
|
|
|||
Максимальный аналог ускорения при ϕ = 0 и ϕ = ϕy :
|
Wmax |
|
|
2 |
|
|
π |
2 |
h |
ay = |
= |
|
d S |
|
= |
|
|||
|
|
|
max |
2ϕy2 . |
|||||
ω2 |
dϕ2 |
||||||||
Для угла возвращения справедливы эти же формулы, только ϕy заменяют на ϕв :
bв = |
π h |
; aв = |
π 2 h |
|||
|
|
2 |
|
. |
||
2 ϕв |
ϕв2 |
|||||
7.3. Построение графиков
Для построения графиков перемещений, аналогов скоростей и ускорений определяют масштабы:
1)по оси абсцисс (ось ϕ ):
µϕ = ϕХраб , где ϕраб = ϕу + ϕд + ϕв ,
Х – произвольно выбранный отрезок в мм, пропорциональный углуϕраб .
2) |
по оси |
|
|
ординат |
µ |
|
= |
ay |
, где |
|
y – отрезок в мм, выбранный |
||||||||||||
2 |
a |
||||||||||||||||||||||
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d S |
|
|
a |
y |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dϕ2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
произвольно, тогда |
|
|
= |
aв |
|
|
|
мм; |
|
|
|
|
|
|
|
||||||||
a |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
b |
|
µ d2S |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
dϕ 2 |
|
|
|
|
|
|
|
|
|
||||
|
µ dS = |
by |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
3) |
, где |
by – отрезок в мм, выбранный произвольно, тогда |
|||||||||||||||||||||
|
|
|
|
||||||||||||||||||||
|
|
|
|
||||||||||||||||||||
by |
|||||||||||||||||||||||
|
|
dϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
bb = µbв мм;
dS
dϕ
142
S |
|
|
|
|
h |
|
|
ϕ у |
ϕд |
ϕ |
ϕ |
в |
|||
|
X |
|
|
dS |
|
|
|
dϕ |
|
|
|
|
bу |
|
|
|
|
|
ϕ |
|
|
|
bв |
d2S |
|
|
dϕ 2 |
|
|
|
|
ϕ |
0,5ϕ |
|
ау |
у |
ав |
|
|
|
|
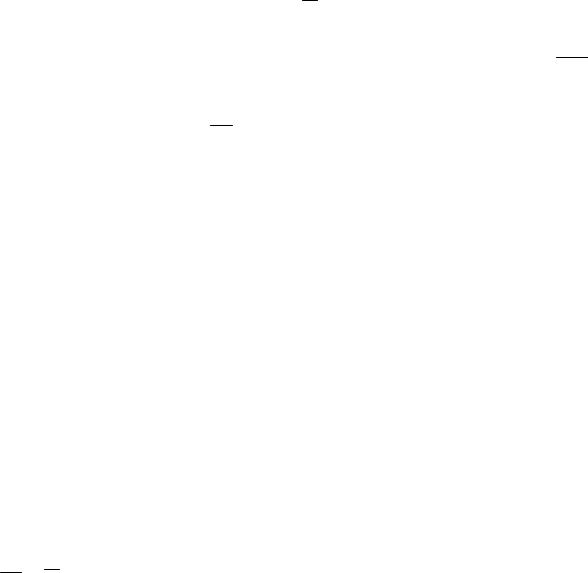
Рис. 7.3. Диаграммы перемещений, аналогов скоростей и аналогов ускорений |
||
143

4)для построения графика перемещений выбирают:
а) |
µS = µ dS |
для |
кулачкового |
механизма |
с |
роликовым |
толкателем |
|||
|
|
dϕ |
|
|
|
|
|
|
|
|
(п. 7.5, примеры 1 и 3); |
|
|
|
|
|
|||||
б) |
S = |
2 |
S |
для |
кулачкового |
механизма |
с |
тарельчатым |
толкателем |
|
|
|
d |
|
|
|
|
|
|
||
dϕ 2
(п. 7.5, пример 2).
7.4. Порядок выполнения синтеза кулачкового механизма
При выполнении синтеза кулачкового механизма в курсовом проекте данными являются:
1) схема механизма;
2) закон изменения аналога ускорения ведомого звена d2S2 = f (ϕ) ; dϕ
3)максимально допустимый угол давления αmax или минимальный
угол передачи γ min (α + γ = 900 );
4)максимальный ход толкателя h или максимальный угол отклонения коромысла ψ и длина коромысла l ;
5)фазовые углы.
Проектирование кулачкового механизма проводят в следующем порядке:
|
1. По заданному закону изменения аналога ускорения ведомого звена |
|
d2S |
= f (ϕ) последовательным интегрированием определяют закон |
|
dϕ2 |
||
|
изменения аналога скорости ddSϕ = f (ϕ)и функцию перемещения ведомого
звена S = f (ϕ) – выполняют на ЭВМ (см. п. 7.2).
2. По результатам расчета строят графики перемещения S = S(ϕ) ,
144
аналога скорости |
dS |
= f (ϕ)и аналога ускорения |
d2S |
= f (ϕ) ведомого звена. |
|
dϕ |
dϕ2 |
||||
|
|
|
При построении графиков обратить особое внимание на определение масштабных коэффициентов (см. п. 7.3)
3. Определяют основные размеры кулачка:
для механизма с роликовым толкателем строят диаграмму
S = f ( dS), при этом обязательно µs = µ dS , (см. 7.5 пример 1 или пример 3); |
|
dϕ |
dϕ |
|
|
для механизма с плоским толкателем строят диаграмму S = f ( d2S2 ), dϕ
при этом обязательно s = d2S . (см. 7.5 пример 2).
dϕ 2
4.Методом обращения движения строят теоретический (центровой) профиль кулачка, а затем практический (конструктивный) профиль.
При выполнении п.п. 3 и 4 обратить внимание на то, чтобы вращение кулачка соответствовало заданию.
5.Для кулачкового механизма с роликовым толкателем определяют
угол давления αi для каждого положения ведомого звена на диаграмме S = f (ddSϕ ) и строят график α = f (ϕ).
6. Пояснительная записка по синтезу кулачкового механизма включает: исходные данные, в том числе схему кулачкового механизма; аналитическое описание закона движения ведомого звена и
определение масштабных коэффициентов для построения графиков ( d2S , µdS , S , ϕ );
dϕ2 dϕ
определение основных размеров кулачкового механизма r0 , rрол (или rтар ), e, l , L;
таблицу значений угла давления для каждого положения механизма.
145