Материал: ТММ в_авиастроении
Проведем разложение механизма на структурные группы Ассура. Разложение следует начинать с отделения группы, наиболее удаленной от ведущего звена. Разложение будет правильным, если после определения каждой группы оставшаяся часть представляет собой кинематическую цепь с тем же числом степеней свободы, что и исходный механизм. Поэтому разложение необходимо начать с попытки отделения группы 2–го класса. В случае неудачи следует выделить группу 3-го класса или 4-го класса.
На рис. 2.1, б показано разложение механизма на структурные группы. Формула строения механизма имеет вид 1 (0, 1) → 221 (2, 3) → 222 (4, 5), т. е. к исходному механизму 1 класса (звенья 0, 1) присоединяются группы Ассура 2–го класса состоящие из звеньев 2 – 3 (2–го порядка, 1–го вида) и 4 – 5 (2–го порядка, 2– го вида). По классификации Ассура – Артоболевского данный механизм является механизмом 2–го класса.
21
3. Кинематический анализ плоских механизмов с
низшими парами
3.1. Общие сведения
Кинематический анализ механизмов имеет своей целью исследование движения звеньев с геометрической точки зрения независимо от сил, вызывающих движение этих тел.
Кинематическое исследование состоит в решении следующих задач:
•определение перемещений звеньев и траекторий, описываемых точками звеньев;
•определение скоростей и ускорений точек выходного звена методом кинематических диаграмм;
•определение линейных скоростей и ускорений точек звеньев методов планов;
•определение угловых скоростей и ускорений звеньев.
Пример 1. Дана схема (рис. 2.1 а), длины звеньев
lO1A = 0,1м; lAB = 0,28 м; lBO3 = 0,24 м; lCO3 = 0,18 м; lCD = 0,28 м;
1
lAS2 = 0,5lAB; lBS3 = 0,5lBO3 ;lCS4 = 3 lCD;a = 0,036 м; b = 0,16 м.
Частота вращения входного звена n1 = 400 об мин.
мин.
22
|
|
|
|
с |
|
d |
f |
|
|
|
|
|
|
|
|
|
|
|
SA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S3 |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
t |
||
|
VA |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рv Hv 4 1 2 3 |
|
4 |
5 6 7 8 9 10 11 12 |
t |
|||||||||||||
|
WA |
1′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
1′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2′ |
2′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рw Hw 1 |
|
2 3 4 5 6 7 |
8 |
9 |
10 |
11 |
12 |
t |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
3′ |
3′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
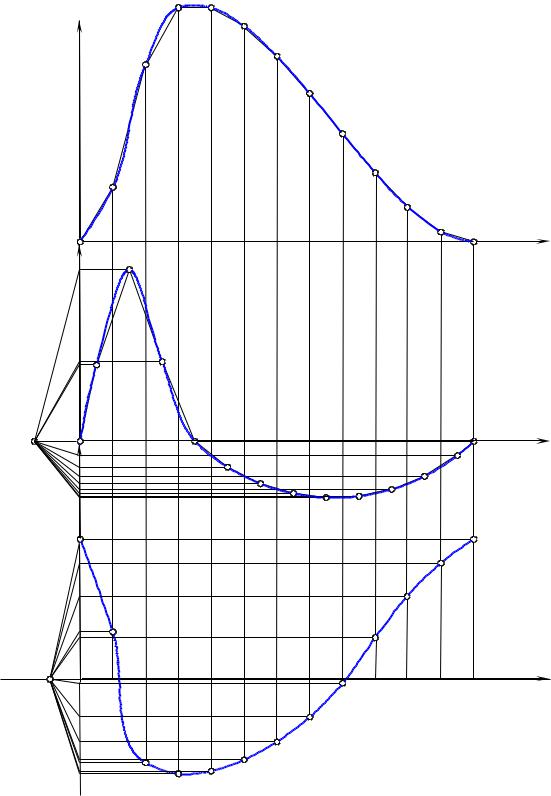
Рис. 3.1. Кинематические диаграммы |
|
|
|
|
|
|||||||||
23

Исследование механизма производится в 10-м положении. Принимаем ω1 = const .
3.2. Определение траектории движения точек звеньев
Порядок расчета:
1.Выбираем масштаб для построения кинематической схемы, определяемой по формуле
l = |
lO |
A |
= |
0,1 |
= 0,002 м мм, |
(3.1) |
|
1 |
|
|
|||||
O A |
50 |
||||||
|
|
|
|
||||
|
1 |
|
|
|
|
|
|
где lO1A = 0,1 м – истинная длина звена; O1A = 50 мм – длина звена на чертеже.
2. В этом масштабе вычерчиваем планы механизма (рис. 2.1, а) в 12 равноотстоящих положениях кривошипа. За нулевое следует принять одно из крайних положений механизма. Для этого необходимо найти длины отрезков всех остальных звеньев механизма, которые будут изображать их на чертеже:
AB = |
l |
AB |
= |
0,28 |
=140 мм; O |
C = |
l O |
C |
= |
0,18 |
= 90 мм |
|
|
3 |
|
|
|||||||
|
|
|
|
|
|
||||||
|
l |
0,002 |
3 |
|
l |
|
0,002 |
|
|||
|
|
|
|
|
|||||||
и так далее.
Для того, чтобы найти правое крайнее положение механизма, нужно из точки О1 отрезком длиной O1A + AB сделать засечку на дуге радиуса O3B. Получим точку B0 для нулевого положения. Затем найдем все остальные положения звеньев механизма. С помощью засечки длинной AB− O1A на дуге радиуса O3B определим левое крайнее положение точки B и обозначим ее через B3′ .
3. Кинематическое исследование механизма необходимо начинать с механизма 1–го класса, т. е. с ведущего звена. Задачи кинематического и силового исследования механизма в каждом положении его ведущего звена решаются для каждой группы Ассура отдельно согласно формуле строения.
24

3.3. Построение кинематических диаграмм
По найденным на планах механизма (рис. 2.1, а) положениям ведомого звена 5 вычерчиваем график перемещения ползуна D (рис. 3.1, а), начиная от крайнего правого положения. Так как по условию ω1 = const, то ось абсцисс является не только осью углов φ поворота кривошипа, но и осью времени t.
Время оборота ведущего звена (кривошипа O1A ) в секундах, найдем по формуле:
T = 60. |
(3.2) |
n1 |
|
Это время рекомендуется изображать на оси |
абсцисс отрезком |
x =180…240 мм; тогда масштаб времени, с/мм |
|
t= T x. |
(3.3) |
Масштаб перемещений, откладываемый по оси ординат, берем таким же, что и масштаб длины на схеме механизма, или изменяем.
Дифференцируя график перемещения, получим график изменения скорости ведомого звена. Дифференцирование проводим графически методом хорд.
Последовательность построения графика VD = VD (t), (рис. 3.1 б):
•проводим секущие (хорды) Oa, ab, bc, cd, df и т. д.
•выбираем полюс pV на расстоянии HV , которое рекомендуется брать
порядка 20…40 мм, и проводим из него лучи 1, 2, 3, 4 и т. д., параллельные секущим Oa, ab, bc, cd и т. д., до пересечения с осью ординат.
•из точек пересечения 1, 2, 3 и т. д. проводим горизонтали до пересечения
свертикальными прямыми, проведенными из середин 0 – 1, 1 – 2 и т. д. отрезков времени ∆t .
•точки пересечения 1′, 2′, 3′, 4′ и т. д. соединяем плавной кривой. Это будет кривая изменения скорости ведомого звена;
•вычисляем масштаб скорости, мс-1/мм,
25