Материал: ТММ в_авиастроении
зацепления простой ступени по заданным межосевому расстоянию и модулю; коэффициенты смещения выбираются с помощью блокирующих контуров или по рекомендациям;
•определяются диаметральные размеры зубчатых колёс планетарной
ступени;
•вычерчивается в масштабе согласно ГОСТ 2.302-68 кинематическая схема редуктора в двух проекциях;
•вычерчивается картина внешнего зацепления простой ступени с выделением рабочих участков линии зацепления и профилей зубьев;
•строится график удельных скольжений;
•на чертеже помещается таблица с основными параметрами зацепления в соответствии с ГОСТ 2.403-75 и ГОСТ 2.405-75.
1.1.5. Синтез кулачкового механизма (лист 4). Порядок выполнения:
•аналитическим интегрированием заданного закона изменения аналога ускорения толкателя определяются законы изменения аналога скоростей и перемещений толкателя в функции от угла поворота кулачка;
•строятся в масштабах график перемещений, графики аналогов скорости
иускорения толкателя;
•производится определение минимального радиуса кулачка;
•методом обращения движения строится теоретический профиль кулачка, определяется диаметр ролика и строится рабочий профиль;
•определяются графически углы давления или углы передач и для них строится график.
1.2. Оформление проекта
Согласно ГОСТ 2.105-79 расчетно-пояснительная записка должна содержать
[16]:
16
•титульный лист;
•реферат по ГОСТ 7.9-77;
•задание на проект;
•содержание;
•перечень сокращений и условных обозначений;
•введение;
•основная (расчётная) часть документа;
•заключение;
•список использованных источников;
•приложения.
Разделы основной части следует делить на подразделы, главы и пункты. Разделы и подразделы должны иметь заголовки. Разделы нумеруются арабскими цифрами в пределах записки.
Подразделы нумеруются арабскими цифрами в пределах раздела. Номер подраздела состоит из номера раздела и номера подраздела, разделённых точкой. Пункты нумеруются арабскими цифрами в пределах подраздела. Пункты могут не иметь заголовка.
Записка должна сопровождаться иллюстрациями, обозначенными рис.1.1, рис. 2.1 и т.д., со ссылками на них в тексте.
При выполнении вычислений следует исходить из практически необходимой точности, обычно с точностью до трёх знаков после запятой.
Записка должна быть аккуратно оформлена на листах формата А4 (297х210) и переплетена. Первой страницей является титульный лист, второй-реферат и т.д. Номера страниц проставляются в правом верхнем углу (кроме титульного листа). Графическая часть проекта выполняется карандашом на 3 – 4 листах формата А1 (594х841). Допускается выполнение графической части с помощью графопостроителя на ЭВМ с использованием графической системы “Компас”.
Каждый лист чертежей и записки должен иметь рамку с полями слева 20 мм, остальные по 5 мм.
В правом нижнем углу чертежа располагают основную надпись формата
17
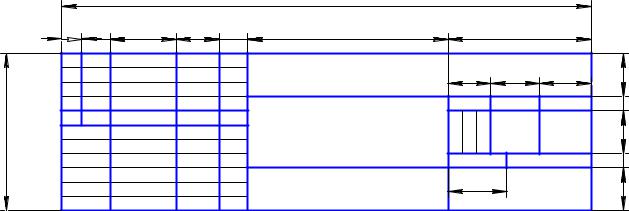
55х185 (рис.1.1). |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
185 |
|
|
|
|
|
|
7 |
10 |
23 |
15 |
10 |
70 |
|
50 |
|
|
|
|
|
|
|
|
|
КП0015.010.003 |
15 |
17 |
|
18 |
15 |
|
|
|
|
|
|
|
|
|
|
||
5х11=55 |
|
|
|
|
|
(Наименование |
Лит. |
Масса |
Масштаб |
5 15 5 |
|
Изм.Лист |
№ докум. |
Подп. Дата |
|
|
|
|
|||||
Разраб. |
|
|
|
листа) |
|
|
|
|
|||
Пров. |
|
|
|
|
|
|
|
||||
Т.контр. |
|
|
|
Лист |
Листов |
|
|||||
|
Н.контр. |
|
|
|
|
20 |
СГАУ |
|
|
15 |
|
|
|
|
|
|
кафедра ОКМ |
||||||
|
Утв. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Рис.1.1. Основная надпись |
|
|
|
|
|
|
18
2. Структурный анализ плоских механизмов с низшими
парами
Проектирование нового механизма, а также анализ существующего возможно только в том случае, если известны элементы, составляющие механизм, и законы их образования, т.е. структура (строение) и классификация.
Структурное исследование механизма состоит в решении следующих задач:
•определение степени подвижности (свободы) заданного механизма;
•разложение механизма на структурные группы Асcура;
•определение класса механизма.
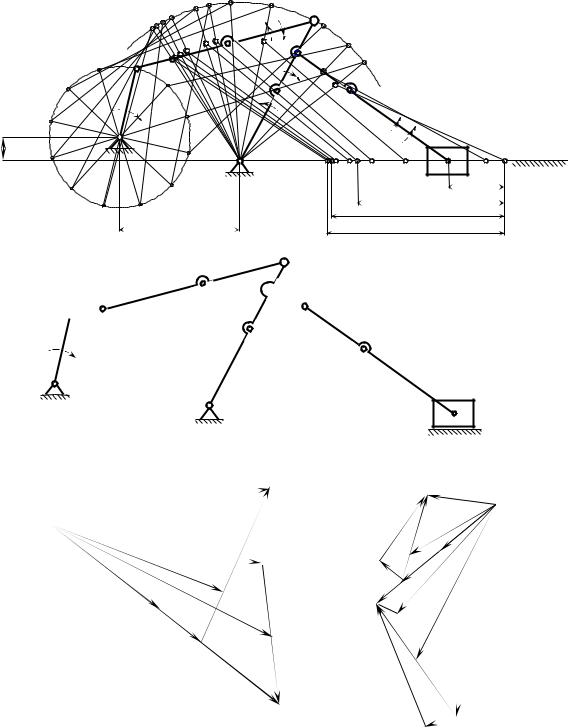
Рассмотрим структурный анализ механизма, показанного на рис. 2.1.
Так как заданный механизм плоский и относится к третьему семейству, то степень подвижности механизма определяется по формуле Чебышева:
W = 3n – 2p5 – p4,
где n – число подвижных звеньев, равное в данном механизме 5;
р5 – число кинематических пар 5–го класса (низшие кинематические пары), в данном механизме их 7 (0–1, 1–2, 2–3, 3–4, 3–0, 4–5, 5–0);
р4 – число кинематических пар 4–го класса (высшие кинематические пары), их в механизме нет.
Тогда W = 3 · 5 – 2 · 7 – 0 = 1.
В данном механизме нет лишних степеней свободы и пассивных связей.
19
|
|
|
|
5 3 6 |
7 |
2 |
8 |
|
9 |
B101 |
|
|
|
|
|
|
|
|
|
|
4 |
|
S2 |
ε |
ω |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
9 |
|
|
|
|
|
|
|
C10 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
||
|
8 |
|
A 11 |
|
|
|
|
|
|
S4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
10 |
|
|
|
ε |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ω |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
7 |
|
|
0 |
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D10 |
|
|
||||
|
6 |
|
O |
|
1 |
|
O3 |
|
|
|
5 |
8 |
ω |
11 0 |
x |
||
a |
|
1 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
4 |
367 |
2 |
9 |
|
S1 |
|
|
|
|
|
|
|
2в |
|
|
|
|
|
|
|
S2 |
|
|
||
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
4 |
3 |
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
B |
|
|
|
|
|
|
|
||
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
D10 |
|
|
|
|
|
|
|
O3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
pO3 |
|
|
|
|
|
|
|
d |
|
|
|
d |
|
|
p O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O13 |
|
|
|
O1 |
|
|
|
|
|
|
a |
|
|
n4 |
S4 |
S3 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
S4 |
|
|
|
|
b |
|
|
|
|
|
|
|
|
S3 |
|
|
|
|
|
|
n3 |
|
|
|
|
|||
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n2 |
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
г |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 2.1. Кинематическое исследование рычажного механизма методом |
|||||||||||||||||
планов: а – кинематическая схема; |
б |
– |
группы |
Ассура; |
в |
– |
план |
скоростей; |
|||||||||
г – план ускорений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20