Материал: ТММ в_авиастроении
зубчатые передачи. Двухступенчатый планетарный центральный редуктор установлен в системе управления закрылками самолёта Як-42 (рис. 8). В этой же системе используется планетарный редуктор типа 3К системы рассогласования закрылков с помощью сельсиновых датчиков ДС-10 (рис. 9).
ДС-10
ДС-10
Рис. 9. Редуктор системы рассогласования
В вертолёте Ми-6 (рис.10) установлен первый в мире турбовальный двигатель Д-25В со свободной турбиной конструкции П.А. Соловьёва. Кинеметическая схема редуктора двигателя, Д-25В показана на рис. 6.12.
Рис. 10. Вертолет Ми-6
11

Турбовальный двигатель ТВаДТВ3-117 с дифференциальным редукторм (рис.11) установлен на вертолётах Ка-52, Ка-32, Ка-50, Ми-14, Ми-28. Турбовинтовые двигатели с редуктором замкнутого типа установлены на самолётах: Ан-3 (ТВД-20), Ан-38 (ТВД-2-03), Ан-24, Ан-26, Ан-30 (ТВД Ан-24), Ан-70 (ТВДД-27) (рис. 12).
Рис. 11. Вертолет Ка-52 и ТВаД ТВ3-117
Рис. 12. Самолет Ан-70 и ТВВДД-27
Самый лучший в мире ТВаДД-146 установлен на крупнейшем в мире вертолёте Ми-26.
Сателлитные дифференциальные редукторы турбовинтовых двигателей НК-12
12
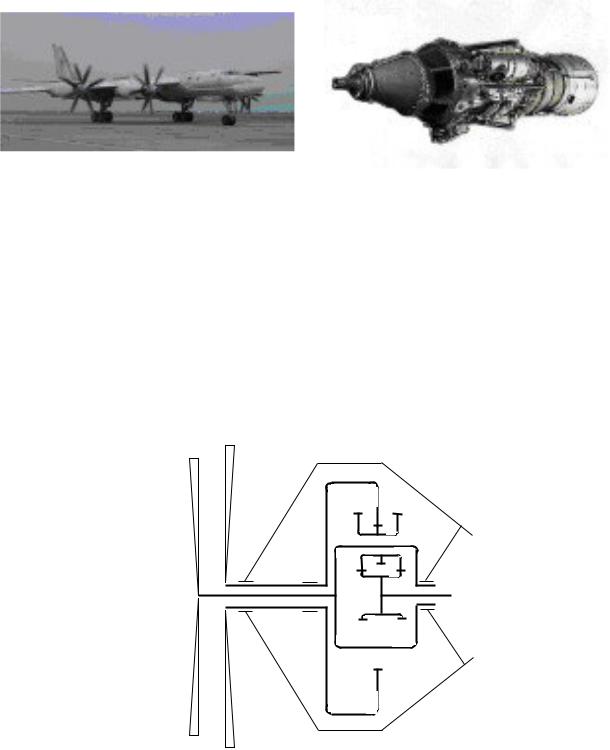
и НК-12М конструкции Н.Д. Кузнецова установлены на самолётах Ту-114 и Ту-95 (рис. 13). Кинематическая схема редуктора двигателей НК-12 показана на рис. 14
Рис. 13. Самолет Ту-95МС и ТВДНК-12
В космических аппаратах применяются планетарные и волновые передачи. Например, в «Луноходе-2» в конструкции привода мотор-колеса применялась трёхступенчатая планетарная передача, а в транспортном американском планетоходе LRV в приводе колёс использовалась волновая передача.
Проектирование механических передач, применяемых в авиационных и космических ЛА, являются предметом рассмотрения данного учебного пособия.
Рис. 14. Кинематическая схема редуктора двигателей НК-12
13
1. Методические указания к выполнению проекта
1.1. Содержание проекта
Проект состоит из графической части в объёме 4 листов формата А1, расчётно-пояснительной записки, оформленной по ГОСТ 2105-79 и содержащей следующие разделы:
1.1.1. Синтез и структурный анализ рычажного механизма (излагается в расчётно-пояснительной записке).
Порядок выполнения:
•производится синтез механизма по коэффициенту изменения скорости хода или другим условиям;
•определяется степень подвижности плоского рычажного механизма;
•производится разложение механизма на структурные группы Ассура;
•определяется класс механизма.
1.1.2 Кинематическое исследование рычажного механизма (лист 1). Порядок выполнения:
•строится в масштабе кинематическая схема механизма;
•строятся планы скоростей и ускорений для всех положений (допускается построение планов для одного – двух положений по указанию преподавателя);
•определяются масштабы планов;
14
•строится диаграмма перемещения выходного звена в функции времени;
•графическим дифференцированием строятся диаграммы скорости и
ускорения;
•определяются масштабы диаграмм;
•определяются скорости и ускорения выходного звена аналитическим способом на ЭВМ, результаты заносятся в таблицу сравнения, оценивается погрешность.
1.1.3. Кинетостатический (силовой) расчёт механизма (лист 2). Порядок выполнения:
•строится диаграмма изменения движущих (или полезного сопротивления) сил за цикл или за время перемещения звеньев из одного крайнего положения в другое;
•определяются силы веса и моменты инерции масс звеньев относительно оси, проходящей через центр тяжести звена;
•определяется для каждого звена результирующая сила инерции по величине, направлению и точке приложения;
•определяются реакции в кинематических парах методом планов сил, уравновешивающая сила и её момент;
•с помощью рычага Жуковского определяется уравновешивающая сила и сравнивается с силой, полученной в результата расчёта с оценкой относительной погрешности, которая не должна превышать 5%;
•определяется потери мощности на трение в кинематических парах.
1.1.4. Синтез зубчатой передачи (лист 3). Порядок выполнения:
•определяется степень подвижности зубчатой передачи;
•определяется общее передаточное отношение и производится разбивка его по ступеням;
•производится подбор чисел зубьев простой и планетарной ступеней по полученным передаточным отношениям;
•производится геометрический расчёт зубчатой пары внешнего
15