Материал: ТММ в_авиастроении
|
m |
l2 |
|
|
|
|
|
|||
IS3 = |
3 |
BO3 |
. |
|
(4.22) |
|||||
12 |
||||||||||
|
|
|
|
|
|
|
|
|||
Тогда величина lS3K = |
lBO3 |
и ее масштабное значение в мм |
|
= |
lS3K |
. |
||||
S2K |
||||||||||
|
||||||||||
|
|
|||||||||
|
|
6 |
|
|
|
l |
||||
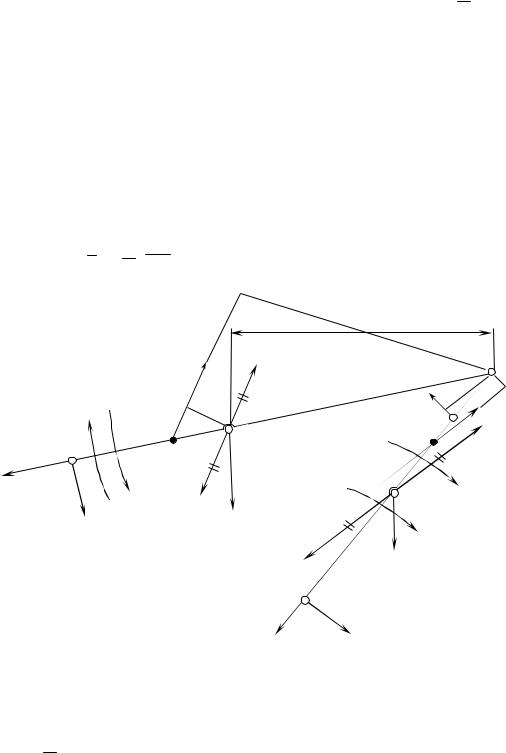
Рассмотрим равновесие звена 2, и определим реакцию Rτ12 . Для этого составим уравнение моментов всех сил, действующих на звено 2, относительно
точки B, предварительно выбрав направление реакции |
|
12τ |
: |
|||||||||||||||||||
R |
||||||||||||||||||||||
|
|
τ |
|
|
− F |
|
|
|
+ G |
|
|
|
= 0. |
|
|
|
||||||
|
|
BA |
hF |
|
a |
(4.23) |
||||||||||||||||
R |
2 |
|||||||||||||||||||||
12 |
|
|
u 2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Решая это уравнение относительно |
|
12τ , получим |
|
|||||||||||||||||||
R |
|
|||||||||||||||||||||
|
= |
Fu 2 hF2 |
− G2 |
|
|
. |
|
|
|
|
|
|
|
|
||||||||
R12τ |
a |
|
|
|
|
|
|
|
(4.24) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
BA |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Величины плеч hF2 , a, BA берем с чертежа (рис. 4.3).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hF2 a |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
В |
|
|
|
|
|
F′u2 |
Fu2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
hR |
|||||||||||||||||
|
|
|
|
|
|
|
h2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Tu2 ε2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
R45 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F′ |
|||||||||||||
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
K3 |
|
u3 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
A |
K |
2 |
|
|
|
|
|
|
h3 |
Fu3 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε3 |
|
|
|
|
|
|
|
|||||
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
R12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S3 |
Tu3 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
F′′u2 G2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
τ12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
u3 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
F′′ |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
03n |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
R |
τ |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R03 |
|
|
|
|
||||||
Рис. 4.3 Схема к силовому расчету Группы Асура второго вида
Если сила Rτ12 получится со знаком «плюс», то ее действительное направление совпадает с первоначально выбранным, а если со знаком «минус», то действительное направление ее будет противоположно выбранному.
46

Определим реакцию Rτ03 . Для этого составим уравнение моментов всех сил, действующих на звено 3, относительно точки В, предварительно выбрав направление реакции Rτ03 :
Rτ |
|
|
|
3 + F |
|
F3 − R |
|
|
|
|
|
|
+ G |
|
|
|
= 0. |
|
|
||||||
|
BO |
h |
43 |
hR |
3 |
d |
(4.25) |
||||||||||||||||||
O3 |
|
|
|
|
|
u3 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
Решая это уравнение относительно |
|
τ03 , предварительно замерив, плечи на |
|||||||||||||||||||||||
R |
|||||||||||||||||||||||||
чертеже (рис. 5.3), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
F3 − G3 |
|
|
|
|
|
|
|
|
|
||||||||||
Rτ |
= |
R43 |
h |
R − Fu3 |
h |
d |
|
. |
|
|
|
|
|
(4.26) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
O3 |
|
|
|
|
|
BO3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Для определения сил R12n , R03n , воспользуемся принципом Даламбера. На основании этого принципа можно записать условие равновесия, согласно которому результирующий вектор всех сил, действующих на группу 221, равен нулю:
|
|
n |
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
n |
|
|
|
|
||
|
|
|
|
|
|
|
|
+ R43 + Fu3 + G |
|
|
|
|
|
|
|
|||||||||||||||||
R12 + R12 + Fu2 |
+ G |
2 |
3 |
+ R03 + R03 = 0. |
(4.27) |
|||||||||||||||||||||||||||
|
||BA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||BO3 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Это означает, что многоугольник сил должен быть замкнутым. В данном |
||||||||||||||||||||||||||||||||
векторном |
уравнении неизвестными |
являются |
величины сил |
|
12n и |
|
03n , а |
|||||||||||||||||||||||||
R |
R |
|||||||||||||||||||||||||||||||
направления этих сил известны. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
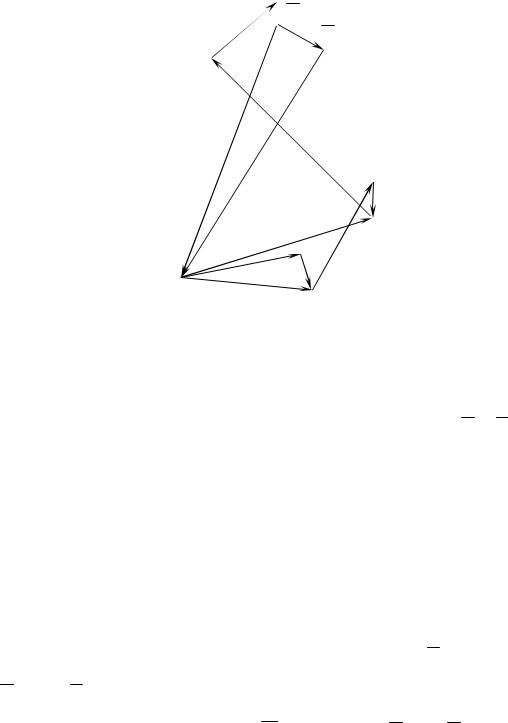
В соответствии с этим уравнением начинаем строить многоугольник сил с |
||||||||||||||||||||||||||||||||
известной силы |
|
12τ |
(рис. 4.4), последовательно откладывая векторы сил. Чтобы |
|||||||||||||||||||||||||||||
R |
||||||||||||||||||||||||||||||||
отложить на плане сил векторы, изображающие силы, следует предварительно их величины разделить на масштаб сил. Последней известной силой будет Rτ03 . Через конец вектора Rτ03 (точка f) и через начало вектора Rτ12 (точка a) проводим линии, параллельные звеньям ВО3 и ВА. Эти линии пересекаются в точке b, которая и определит величины векторов R12n и R03n и их направления на чертеже.
Определим их истинные величины:
R03n = fb F и R12n = ab F .
Определим полные реакции R12 и R03 : R12 = bc F и R03 = bd F .
47
d  G3 RτD3
G3 RτD3
|
|
|
R43 |
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fu2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
||
R03 |
|
Оn |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
R |
3 |
|
|
|
12n |
а |
|||||||||
b |
|
|
|
|
|
|
|
τ |
|||||||
|
|
|
|
R |
|
|
|||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
R12 |
|||||
|
|
|
|
|
|
|
τ12 |
с |
|||||||
|
|
|
|
|
R |
||||||||||
Рис. 4.4. План сил для группы Ассура второго вида
Рассматривая равновесие звена 2 или 3, определяем реакцию R32 (R23) :
|
|
12 |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
Fu2 + |
G2 |
+ R32 = 0, |
(4.28) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или |
|
||||||||||||||||||
|
|
23 + |
|
|
43 + |
|
|
|
|
|
|
|
|
|
|
||||
|
R |
|
R |
Fu3 + G3 + R03 = 0 . |
(4.29) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сумма первых трех векторов по первому уравнению или сумма четырех последних векторов по второму уравнению на плане сил уже построена. Тогда из конца вектора G2 (точка е) проводим прямую в начало вектора R12 (точка в). Это и есть сила R32 или R23 , действующая в кинематической паре В.
Истинная величина этой силы R32 = be F . При этом R23 = −R32 .
4.3. Кинетостатика ведущего звена
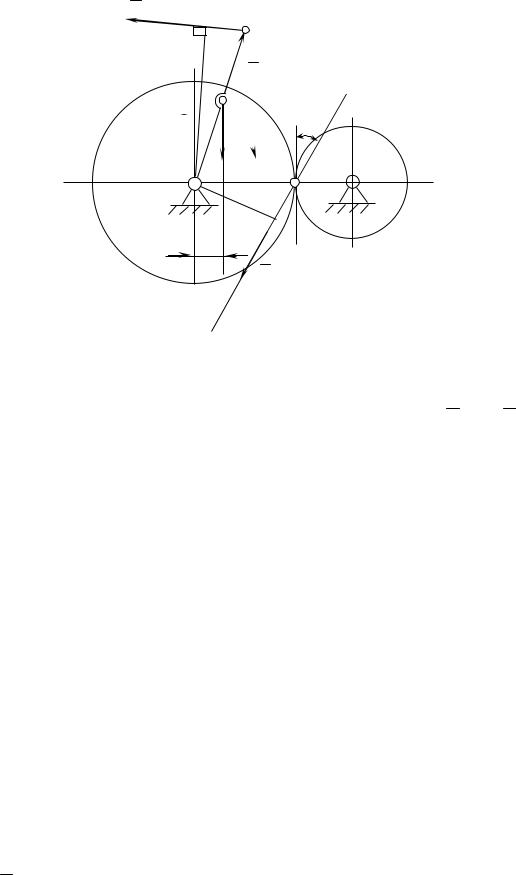
Переходим к кинетостатике ведущего звена. Сила тяжести G1 ведущего звена О1А приложена в центре тяжести S1 (рис. 4.5).
48
R21 |
|
А |
|
|
|
|
|
|
|
|
h1 |
Fu1 |
|
|
|
|
n |
||
|
|
|
|
|
|
|
S1 |
|
αw |
|
|
|
|
|
|
O1 |
G1 |
ω1 |
O4 |
|
|
W |
||
|
|
rb5 |
|
|
|
b |
|
|
|
|
|
Fур |
|
|
n
Рис. 4.5. Схема к расчёту уравновешивающей силы с зубчатой передачей
= −R12 . Сила
(4.30) Так как ведущее звено вращается равномерно, считаем, что действующие на него силы уравновешиваются силой, которую называем уравновешивающей Fур,
приложенной к нему со стороны двигателя. Точка приложения и направление уравновешивающей силы зависят от конструкции привода, передающего движение от двигателя к рабочей машине.
Если вращение передается с помощью зубчатых колес и ступень, которая связана с ведущим звеном, является ступенью с неподвижными осями, то сила Fур проходит через полюс зацепления, т. е. через точку касания начальных окружностей. Сила Fур направлена по линии зацепления. При эвольвентном зацеплении линия зацепления совпадет с нормалью, проведенной в точке касания зубьев, и образует с касательной к начальным окружностям угол зацепления αW .
Сила R01 (реакция со стороны стойки O на звено 1 в кинематической паре О1) неизвестна ни по величине, ни по направлению.
Под действием указанных выше сил можно считать, что ведущее звено 1
49

находится в равновесии. Поэтому можно применить условие равновесия статики. Для определения величины силы Fур составим уравнение равновесия в виде суммы моментов всех сил, действующих на ведущее звено (кривошип) относительно точки О1 (рис. 4.5):
R21 |
h |
1 − G1 |
b |
− Fур |
r |
b5 = 0. |
(4.31) |
||||||||
Откуда |
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||
Fур = |
R21 |
h |
1 − G1 |
b |
|
. |
(4.32) |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
rb5 |
|
|||||||||
Величины плеч определяются непосредственно из чертежа в миллиметрах. Кратчайшее расстояние (плечо) от точки О1 до направления силы Fур есть ни что иное, как радиус основной окружности зубчатого колеса, жестко соединенного со звеном О1А.
Для определения реакции R01 составим уравнение равновесия, согласно которому главный вектор всех сил, действующих на кривошип, равен нулю:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fu1 + |
G1 |
+ |
R21 |
+ Fур + R01 = 0. |
(4.33) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В соответствии с этим уравнением строим план сил, действующих на |
||||||||||||||||||||||||
кривошип (рис. 4.6). Построение плана начинаем с силы |
|
21 . Сложив все известные |
||||||||||||||||||||||
R |
||||||||||||||||||||||||
силы и соединив точки a и b, получим векторы силы |
|
01 . |
|
|||||||||||||||||||||
R |
|
|||||||||||||||||||||||
Его истинная величина |
|
01 = |
|
µF . |
|
|||||||||||||||||||
|
ab |
|
||||||||||||||||||||||
R |
|
|||||||||||||||||||||||
Сила Fур создает на звене О1А относительно О1 момент, Н·м, |
|
|||||||||||||||||||||||
Mур = Fурrb5 , |
(4.34) |
|||||||||||||||||||||||
где rb |
5 |
= rW cosαW . |
|
|||||||||||||||||||||
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
50