Материал: ТММ в_авиастроении
|
|
|
|
|
|
|
|
Fур |
|
|
|
|
|
||
Fu1 |
|||||||
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
G1 |
|||
|
|
b |
|||||
|
|
R01 |
|||||
Fyp a
Рис. 4.6. План сил при равновесии механизма первого класса (входного звена) с зубчатой передачей
При определении реакции в опоре О1 ведущего звена практически возможен и другой случай, когда кривошипный вал соединен с двигателем посредством муфты или жестко связан с водилом или с одним из центральных колес планетарного редуктора (рис. 4.7). В этом случае к валу приложен уравновешивающий момент
Mур = P21h1 , (4.35)
l
ареакция в опоре вала будет равна действию второго звена на кривошип R01 = −R21 (если пренебречь весом звена 1).
R12
 A
A
h1 My
D1
R01
Рис. 4.7. Схема к расчёту механизма первого класса при отсутствии зубчатой передачи
51

4.4. Теорема Н.Е. Жуковского
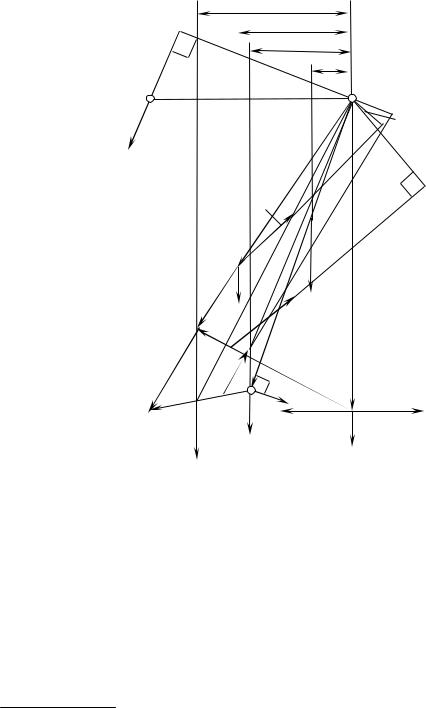
Теорема Жуковского о жестком рычаге позволяет определить уравновешивающую силу, не определяя реакции в кинематических парах. Эта теорема основана на принципе возможных перемещений и ее можно сформулировать так: если механизм находится в динамическом равновесии под действием активных сил и сил инерции, то план скоростей, повернутый на угол 90˚ и нагруженный этими же силами в соответствующих точках, будет так же находится
вравновесии и сумма моментов этих сил относительно полюса плана скоростей равна нулю. План скоростей рассматривается здесь как жесткий рычаг, имеющий одну неподвижную точку р – полюс плана скоростей.
Силы, действующие на звенья механизма, переносим параллельно самим себе
всоответствующие точки s1, k2, s2 и т. д., повернутого на угол 90˚ плана скоростей. Повернутый план скоростей может быть построен в любом произвольно выбранном масштабе (рис. 4.8).
Силу Fур′ будем считать условно приложенной в точке A кривошипа
перпендикулярно звену О1А. Тогда на повернутом плане скоростей (рис 4.8) силу Fур′
приложим в точке a перпендикулярно отрезку pa. Затем напишем уравнение моментов всех сил относительно полюса р плана скоростей:
Fур′ pa+ G2 h2 + G1h1 + Fu 2 a+ G3 h3 + G4 h4 + Fu3 b + Fu 4 d + Fu5 pd − FC pd = 0 . (4.36) Длину плеч в миллиметрах берем с чертежа (рис 4.8). Решая составленное
уравнение относительно Fур′ , получим
F′ |
= − |
|
G |
2 |
h |
2 + G1 |
h |
1 + Fu 2 |
a |
+ G3 |
h |
3 + G4 |
h |
4 + Fu3 |
b |
+ Fu4 |
d |
+ Fu5 |
pd |
− FC |
pd |
|
, (4.37) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ур |
|
|
|
|
|
|
|
|
|
|
|
pa |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
и уравновешивающий момент
M′ур = Fур′ lO1A . (4.38) В действительности уравновешивающая сила будет приложена в полюсе зацепления колес 4 и 5 (рис. 4.6). Поэтому желательно на повернутом плане скоростей определить скорость Vw точки зацепления W и в конце вектора скорости
52
|
VW |
приложить FЖ (рис 4.8) |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
ур |
|
|
|||||||||||||||||
|
|
Тогда |
|
|
||||||||||||||||||||||
|
|
FурЖ = − |
|
|
2 |
|
2 + G1 |
|
1 + Fu 2 |
|
+ G3 |
|
3 + G4 |
|
4 + Fu3 |
|
+ Fu 4 |
|
+ Fu5 |
|
− FC |
|
|
|
|
|
|
|
G |
h |
h |
a |
h |
h |
b |
d |
pd |
pd |
, |
(4.39) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
h |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
а уравновешивающий момент |
|
|
||||||||||||||||||||||||
|
|
M′ур = FурЖrb5 . |
|
(4.40) |
||||||||||||||||||||||
h2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R45 |
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h4 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Fж |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
F |
u3 |
S1 |
|||||||||||||||||||||
|
|
|
|
S3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G′1 |
||||||||||||
|
|
|
|
|
G3 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
c |
|
|
|
|
|
|
|
|
|
Fu4 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k4 |
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
Fu2 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
F′ур |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
в |
2 |
|
k2 |
a |
|
|
|
|
|
|
|
|
|
|
d |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fu5 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 Fс |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
G5 |
|||||||||||||||||||||
|
|
|
G2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
.
Рис 4.8 Определение уравновешивающей силы при помощи рычага Жуковского
Значения Mур , полученные с помощью планов сил и по теореме Жуковского,
не должны иметь расхождение более 5%. Погрешность подсчитывается по формуле
|
M |
ур |
− M′ |
|
F |
− FЖ |
|
|
∆ = |
( |
ур |
)100% или ∆ = |
ур |
ур |
100%. |
(4.41) |
|
|
′ |
|
Ж |
|||||
|
0,5 Mур − Mур |
|
0,5(Fур − Fур ) |
|
||||
|
|
|
|
|
53 |
|
|
|
Примечание. План скоростей для рычага Жуковского можно строить и в обычном положении, не поворачивая его, но тогда надо повернуть на 90˚ в одну сторону все силы. При сложных планах скоростей такой метод может оказаться более удобным.
4.5. Учет потерь мощности на трение
Рассмотрим определение потерь на трение в рычажных механизмах. После того, как рассчитаны давления (реакции) в кинематических парах рычажного механизма с идеальными связями, можно подсчитать суммарную мощность потерь она трение.
Полная мгновенная мощность потерь на трение в механизме получается суммированием мощностей, вычисленных для всех кинематических пар:
Ртр=PтрO1 |
+ РтрА + РтрВ + PтрO3 РтрО3 + РтрDв+ РтрDп, |
(4.42) |
|||||
где |
|
|
|
|
|
|
|
|
Ртр вращ = fвRij |
dц |
ωij, |
(4.43) |
|||
|
|
||||||
|
|
|
|
2 |
|
|
|
|
Ртр пост = fп·Roi·Vi; |
(4.44) |
|||||
Rij – реакция в кинематической паре; |
|
||||||
fв и fп – коэффициенты трения во вращательной и поступательной парах; |
|||||||
dц – диаметр шарнира, м; |
|
||||||
ωij – относительная угловая скорость. Для пары звеньев 1 – 2 |
|
||||||
|
ω12 = ω1± ω2. |
(4.45) |
|||||
Знак «плюс» берется, если угловые скорости звеньев разного знака, а знак |
|||||||
«минус» - если одного знака. |
|
||||||
Давления и угловые скорости звеньев были определены выше. |
|
||||||
Приведенный к валу момент трения, Н·м: |
|
||||||
ТПР |
= Р |
ТР |
/ω |
(4.46) |
|||
ТР |
|
1. |
|
|
|
||
В разных положениях рычажного механизма результат вычислений будет различным, поэтому полная картина получается при рассмотрении ряда положений
54

механизма.
Мгновенный коэффициент полезного действия рычажного механизма определяется по формулам:
для рабочей машины
η = |
PПС |
, |
(4.47) |
||
P |
− P |
||||
|
ПС |
ТР |
|
|
|
и для двигателя |
|
||||
η = |
PДВ − PТР |
, |
(4.48) |
||
|
|||||
|
PДВ |
|
|
||
где РПС – мощность сил полезного сопротивления; РДВ – мощность движущих сил.
Мгновенный коэффициент полезного действия рычажного механизма можно так же вычислить, если известны приведенный момент трения Ттрпр и уравновешивающий момент Мур, по формуле
η = M+ур ПР . (4.49)
Mур TТР
Вычислив этот коэффициент для нескольких положений, можно найти средний коэффициент полезного действия рассматриваемого механизма.
55