Материал: ТММ в_авиастроении
|
|
|
|
q |
|
+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
График удельных скольжений |
|
A |
1О1 |
w1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
= 0,1 мм -1 |
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ϑ |
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
B |
q |
|
qp1 |
|
|
|
|
|
|
|
|
|
d |
a1 |
|
||||
|
|
|
rp1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
p2 |
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
1 |
|
|
|
|
|||
+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
in |
|
|
|
|
|
|
|
d |
|
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
va |
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
||
N |
|
|
|
|
|
w |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
aw |
|
|
|
|
|
|
|
c*m |
|
1 |
|
s |
|
|
|
|
|
|
|
|
||
|
2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|||
|
rp |
|
|
|
|
|
|
A N1 s1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
a2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
sa2 |
|
|
|
|
p |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
e1 |
|
|
1 |
|
c |
|
|
sw |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
e2 |
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
sw2 |
W |
|
|
c2 |
|
|
|
|
sa |
|
|
|
|
|
|
||||
|
|
|
p2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
s |
|
B |
|
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
c*m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
r |
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N2 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
a |
|
|
m |
τ2 |
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
d |
|
d |
f |
d |
2 |
d |
w |
|
d |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
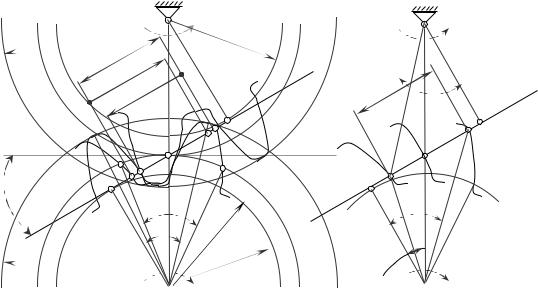
Рис. 5.2 Схема зацепления цилиндрической пары колес с эвольвентными |
|||||||||||||||||||||
|
|
|
|
зубьями |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Шагом зацепления p называется расстояние по начальной окружности между |
|||||||||||||||||||||
двумя одноименными точками двух соседних профилей; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Угол зацепления – острый угол αW |
между линией |
зацепления и |
прямой, |
||||||||||||||||||
перпендикулярной линии центров O1O2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
61
Угловой шаг – отношение
τ1 = |
2π |
и τ2 |
= |
2π . |
(5.4) |
|
|
Z |
|
|
Z |
2 |
|
|
1 |
|
|
|
|
|
Основным геометрическим параметром зацепления является модуль зацепления. Согласно ГОСТу 9563–60 модулем называется отношение шага p к числу π, т.е.
m = |
p |
, мм. |
(5.5) |
|
|||
π |
|
|
|
Стандартом предусмотрено два ряда модулей m (первый ряд считается предпочтительным):
1–ый ряд: 0,05; 0,06; 0,08; 0,1; 0,12; 0,15; 0,2; 0,25; 0,3; 0,4; 0,5; 0,6; 0,8; 1,0; 1,25; 1,5; 2,0; 2,5; 3,0; 4,0; 5,0; 6,0; 8,0; 10; 12; 16; 20; 25; 32; 40; 50; 60; 80; 100.
2-й ряд: 0,055; 0,07; 0,09; 0,11; 0,14; 0,18; 0,22; 0,28; 0,35; 0,45; 0,55; 0,7; 0,9; 1,125; 1,375; 1,75; 2,25; 2,75; 3,5; 4,5; 5,5; 7,0; 9,0; 11; 14; 18; 22; 28; 36; 45; 55; 70; 90.
B |
P1 |
|
|
|
|
|
a1 |
|
|
a2 |
N1 |
|
|
|
|
P2 |
A |
df1 db1 dW1 |
N2 |
|
da1
da2
df2
О1 db2  dW2
dW2
αW
aW12
О2
Рис. 5.3 Геометрические элементы зубчатого внутреннего зацепления
62
Делительной окружностью называется окружность, для которой модуль является стандартным. Через модуль выражается диаметр делительной окружности и все линейные размеры колес:
d = mz. |
(5.6) |
Формулы расчета геометрических параметров зацепления приведены в таблице 5.3.
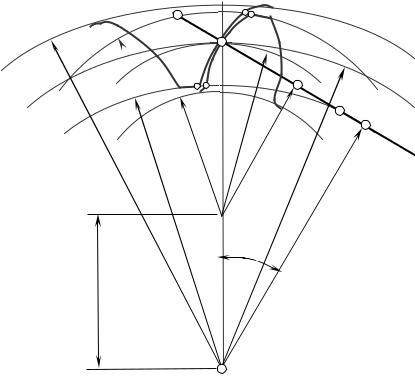
Главной боковой поверхностью зубьев чаще всего является эвольвентная поверхность. Эвольвентой называется кривая, которую описывает любая точка прямой, обкатывающейся без скольжения по окружности (рис. 5.4). Окружность, по которой перекатывается прямая, образующая эвольвенту, называется основной, диаметр которой обозначается dв .
Уравнение эвольвенты в параметрической форме выражаются формулами (рис 5.4 б):
invαy = tgαy −αy , |
(5.7) |
|||
ry = |
rв |
. |
(5.8) |
|
cosαy |
||||
|
|
|
||
|
|
6' |
|
|
|
5' |
|
Му |
|
|
4' |
|
|
|
3' |
|
|
rу |
|
|
|
|
||
2' |
1 |
2 |
3 |
4 |
5 |
1' 0 |
|
|
|
||
|
|
|
6 |
||
|
dв |
|
|
O |
|
|
|
|
|
Өу |
αу |
Nу |
|
||
Мо |
|
|
dв |
O |
|
а) |
б) |
Рис. 5.4. Эвольвента окружности: а – схема образования эвольвенты; б – к выводу уравнения эвольвенты
63
5.3. Основные качественные показатели эвольвентного
зацепления
К основным качественным показателям, характеризующим передачу с точки зрения плавности и бесшумности зацепления, прочности зубьев, а также их износа, относятся коэффициенты перекрытия εα , удельного скольжения υ профилей зубьев и удельного давления qp.
5.3.1. Коэффициент перекрытия
Коэффициентом торцевого перекрытия называется отношение угла торцевого перекрытия ϕα (угла поворота зубчатого колеса от положения входа зуба в зацепление до выхода из него) к угловому шагу τ
εα |
= |
|
ϕα1 |
= |
ϕα 2 |
. |
(5.9) |
|
τ1 |
|
|||||
|
1 |
|
|
τ2 |
|
||
|
|
|
|
|
|
|
|
Коэффициент перекрытия характеризует непрерывность и плавность зацепления в передаче. По этому коэффициенту можно определить число пар профилей зубьев, находящихся одновременно в зацеплении. Если, например,
εα =1,43, то 43% от общего времени зацепления одной пары сопряженных профилей
взацеплении находятся две пары, а 57% – одна пара.
Для прямозубых передач значения коэффициента перекрытия находятся в пределах 1,05 ≤ εα ≤ 2. Необходимо отметить, что с увеличением коэффициентов смещения х1 и х2 коэффициент перекрытия уменьшается.
Для косозубой передачи (β≠ 0) коэффициент перекрытия определяется по формуле:
εχ = εα + εβ , |
(5.10) |
где εβ – коэффициент осевого перекрытия, который определяется по формуле
εβ |
= |
ψ вт sin β |
. |
(5.11) |
|
||||
|
|
π |
|
|
|
|
|
|
64 |
Здесь ψ вт |
= |
bw |
- коэффициент ширины зубчатого колеса. |
|
m |
||||
|
|
|
||
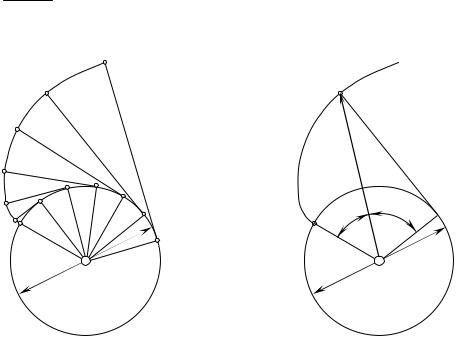
При помощи |
коэффициента перекрытия εα можно определить участок |
|||
рабочей части линии зацепления, на котором происходит зацепление в данный момент только одной пары профилей, а также те участки, на которых происходит одновременное зацепление двух пар профилей. Для этого от крайних точек А и В активной части линии зацепления АВ необходимо отложить отрезки Аf и Вk, равные длине основного шага pв (рис. 5.5 а) и получаем участки Ak, kf, kB.
Участок kf является зоной однопарного зацепления. Участки Ak и fB представляет собой зоны двухпарного зацепления. Если точка касания сопряженных профилей находится на участке Ak, то одновременно с ней на участке fB будет находится точка касания второй пары сопряженных профилей.
На рис 5.5 б показано положение профиля шестерни при входе в зацепление и выходе из него. Формула для определения коэффициента перекрытия приведена в табл. 5.3.
αW
ra |
О2 |
ω2 |
rв2 |
О2 |
ω2 |
|
|||||
|
|
|
|||
2 |
|
|
|
|
|
εα pв |
|
|
|
|
|
|
pв pв |
|
ВN2 |
εα pв |
αа2 ВN2 |
|
KW |
|
|
||
|
f |
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
N1 |
Aφα1 |
|
|
N1 αа1 |
|
|
τ1 |
|
rв1 |
rв1 |
|
ra |
|
|
αw |
|
|
1 |
|
|
|
|
|
О1 


 ω1
ω1
О1 


 ω1
ω1
а |
б |
Рис.5.5. К определению коэффициента перекрытия:
а – схема определения зон однопарного и двухпарного зацепления; б – определение рабочей части линии зацепления.
65