Материал: ТММ в_авиастроении
2 |
C |
|
|
P2'3 |
n |
|
|
|
|||
|
|
|
|
|
|
O2 |
B |
|
|
P2H |
b |
|
|
|
|
||
|
3 |
|
|
γH |
|
|
|
|
|
||
Д |
2′ |
4 |
|
P12 |
a |
|
|
d |
|||
A |
|
|
|
|
γi |
O1 |
|
O3 |
O13 |
||
|
|
|
|||
|
|
|
|
|
|
1 |
|
E |
|
e |
P45 |
|
|
aw45 |
|
||
|
|
|
|
||
|
|
O5 |
|
|
O5 |
|
|
5 |
|
|
f |
Fn
m |
2'2 |
O H,4 |
1 m |
Рω
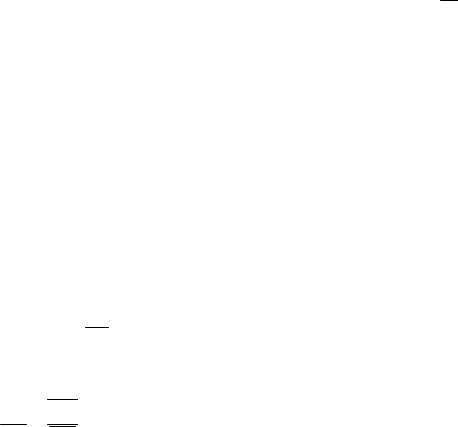
Рис. 6.13. Планы линейных и угловых скоростей сложного планетарного редуктора
Порядок построения следующий: |
|
||
1. Строят в масштабе l |
м |
|
кинематическую схему, откладывая аw и |
|
|||
|
мм |
|
|
диаметры начальных окружностей dw1 , dw2 , dw2′ , dw3 , dw4 , dw5 .
2.На вертикаль n – n сносят центры вращения колёс On и полюсы Р.
3.В масштабеµv из полюса Р12 откладывают скорость точки А на начальной
окружности колеса 1: VA = ω1 0,5dω1 = p12a µv .
Соединив точки O13 и а, получим картину линейных скоростей колеса 1.
4.Так как в полюсе Р2′3 скорость равна нулю (колесо 3 неподвижно), линияР2′3a есть картина скоростей сателлита 2.
5.Линия Р2Нb есть масштабное значение скорости сателлита и водила на оси O2, а линия O13b есть картина распределения скоростей на водиле Н и на колесе 4.
6.На рис. 6.13 из треугольника O13 p12a определяется тангенс угла γ1
101
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.33) |
|
|
|
|
P12a |
|
|
|
|
|
|
|
|
||||
tgγ |
1 |
= |
|
|
= |
ω10,5dw1µ l |
= |
ω1µl . |
||||||||
|
|
|
|
|
|
µ |
|
0,5d |
|
|||||||
|
|
O |
P |
|
|
v |
w1 |
|
µ |
v |
||||||
|
|
|
13 |
12 |
|
|
|
|
|
|
||||||
Следовательно, tgγ1 пропорционален угловой скорости звена.
Тогда, если на вертикали n – n отложить полюсное расстояние h = OPω и от точки Pω провести лучи, параллельные соответствующим лучам картины линейных скоростей, то получится с учётом выражения (6.32), что отрезок O1на горизонтали m – m будет равен
|
|
= h tgγ |
|
= hµl ω = |
ω1 |
. |
||||
|
О1 |
1 |
||||||||
|
|
|||||||||
|
|
|
|
|
µ |
v |
1 |
µ |
|
|
|
|
|
|
|
|
|
|
ϖ |
||
Отсюда масштаб угловых скоростей |
||||||||||
|
µ = µv . |
|
|
|
|
(6.34) |
||||
|
ω |
µlh |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Следовательно, |
чтобы определить угловую скорость любого звена, надо |
|||||||||
соответствующий отрезок на картине угловых скоростей умножить на масштаб µω . Так, относительная угловая скорость сателлита относительно водила
ω2(H) = ω2 −ωH = 2Hµω .
Передаточное отношение редуктора можно определить из соотношения
u(3) = ω1 = O1.
1H ωH OH
6.4. Конструктивные особенности сателлитных передач
При кинематическом синтезе сателлитных передач, заключающемся в подборе чисел зубьев зубчатых колёс принятой схемы по заданному передаточному отношению, приходится учитывать некоторые конструктивные особенности. К ним относятся условия соосности, соседства, сборки и отсутствия заклинивания.
Рассмотрим эти особенности.
6.4.1. Условие соосности
102
Все сателлитные передачи выполняются по сосной схеме, т.е. в такой передаче необходимо выдерживать равенство межосевых расстояний. Так, в планетарной двухрядной со смешанным зацеплением передаче (рис. 6.13) межосевое расстояние между осями зубчатых колёс z1 и z2 должно равняться межосевому расстоянию колёс z2′ и z3
aw12 = aw2′3 ,
или
|
m12 |
(z1 + z2 ) |
|
cosα |
= |
m2′3 |
(z3 |
− z2′ ) |
cosα |
. |
(6.35) |
|
2 |
cosαw12 |
|
|
|
||||||||
|
2 |
|
|
cosαw 2′3 |
|
|||||||
В большинстве случаев в сателлитных передачах α = αW. |
|
|||||||||||
Обозначим |
|
m12 |
= λ . |
|
|
|
|
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
m2′3 |
|
|
|
|
|
|
|
|
Тогда |
|
|
|
|
|
|
|
|
|
|
||
λ(z1 + z2 )= z3 − z2′ . |
|
|
|
(6.36) |
||||||||
Для любой сателлитной передачи условие соосности записывается: |
|
|||||||||||
λ(z1 ± z2 )= z3 ± z2′, |
|
|
|
(6.37) |
||||||||
где знак минус соответствует внутреннему зацеплению. |
|
|||||||||||
В однорядной передаче по схеме I (Табл. 5.1) модули зубчатых колёс |
|
|||||||||||
одинаковые, т.е. λ =1. Поэтому |
|
|
|
|
||||||||
z1 + z2 = z3 − z2 , |
|
|
|
|
|
|
(6.38) |
|||||
или |
|
|
|
|
|
|
|
|
|
|
||
z1 + 2z2 = z3 . |
|
|
|
|
|
|
|
|||||
Для передач типа 3К (Рис.6.4) должно быть выдержано двойное равенство
λ(z1 + z2 )= λ(z4 − z2 )= z3 − z2′ . (6.39) Для замкнутых дифференциальных передач (рис. 6.5) необходимо выдержать
два равенства
λ1(z1 + z2 )= z3 − z2′ , |
|
λ2 (z3 + z4 )= z4′ + z5 , |
(6.40) |
103

где λ1 = m12 и λ2 = m3′4 .
m2′3 m4′5
Всиловых двухрядных передачах и передачах 3К из расчёта на прочность модуль одной ступени получается неравным модулю другой. Обычно m2′3 > m12 .
Вприборах все колёса часто имеют один и тот же модуль, т.е. m12 = m2′3
6.4.2. Условие соседства
Для уменьшения диаметральных размеров при проектировании сателлитных передач стремятся увеличить число сателлитов. Чаще всего число сателлитов выбирается от 3 до 8. Однако, количество их в передаче обусловлено двумя ограничениями, рассмотренными впервые В.В. Добровольским [5]: условием соседства и условием сборки.
Условие соседства заключается в том, чтобы сателлиты при своём вращении не задевали друг друга, (Рис. 6.1)
Обозначим:
k = z2 − отношение чисел зубьев двухвенцового сателлита; z2′
an − число сателлитов передачи; λ = m12 .
m2′3
Учитывая, что
m z |
2 |
= d |
2 |
, а m |
2′3 |
z |
2′ |
= d |
2′ |
,то |
d2 |
|
= |
m12z2 |
= λk . |
(6.41) |
|||
|
|
|
|
||||||||||||||||
12 |
|
|
|
|
|
|
|
|
d2′ |
|
m2′3z2′ |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Расстояние между осями двух соседних сателлитов должно быть больше |
|||||||||||||||||||
суммы двух |
радиусов |
|
окружностей |
вершин сателлитов, т.е. |
O2O′2 >2ra2 , если |
||||||||||||||
λk >1и O2O′2 >2ra2′ , если λk <1. |
|
|
|
|
|
|
|||||||||||||
Угол O |
OO′ |
равен |
2π , т.к. сателлиты равномерно распределены в пределах |
||||||||||||||||
|
|
|
2 |
|
|
2 |
|
|
|
|
an |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
угла 2π . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Опустим |
|
из |
центра O |
на |
линию O2O′2 перпендикуляр |
OK . Тогда для |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
104 |
|
|
|

прямоугольного треугольникаOKO2 после соответствующих перестановок получим
O2K = O22O′2 = m212 (z1 + z2 )sin π . an
Для нулевых колёс, нарезанных без смещения инструмента, da2 = m12 (z2 + 2ha ) и da2′ = m2′3 (z2′ + 2ha ).
Поэтому условия соседства запишутся следующим образом (при ha =1):
λ (z + z |
|
)sin |
π |
> z |
|
+ 2 (при λk <1), |
|
|||||||
2 |
|
|
2′ |
|
||||||||||
1 |
1 |
|
|
|
|
an |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(z |
+ z |
|
)sin |
π |
|
> z |
|
+ 2 (при λk >1). |
|
|||||
2 |
|
|
2 |
|
||||||||||
1 |
|
|
|
|
an |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
В общем случае для нулевых цилиндрических передач |
|
|||||||||||||
λ (z ± z |
|
)sin |
π |
> z |
|
+ 2 (при λk <1), |
|
|||||||
2 |
|
|
2′ |
|
||||||||||
1 |
1 |
|
|
|
|
an |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(z |
± z |
|
)sin |
π |
|
> z |
|
+ 2 (при λk >1), |
(6.42) |
|||||
2 |
|
|
2 |
|
||||||||||
1 |
|
|
|
|
an |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
где плюс при внешнем зацеплении, а минус – при внутреннем зацеплении.
6.4.3. Условие сборки
Условие сборки представляет собой уравнение, связывающее числа зубьев зубчатых колёс, число сателлитов и их взаимное расположение.
Рассмотрим планетарную однорядную передачу (рис. 6.14).
Сателлит 2 с центром в O2 всегда можно ввести в зацепление с колёсами z1 и z3 . Однако при постановке следующих сателлитов зубья их могут не войти одновременно в зацепление с зубьями колес z1 и z3 . Тогда поставить сателлиты будет невозможно. Рассмотрим условие, при котором зубья всех сателлитов могут войти в правильное зацепление с зубьями колёс z1 и z3 . Если от точек а1 и b1
диаметра d2 откладывать шаги p по начальным окружностям колёс z1 и z3 , то в
общем случае на дуге а1a2 , соответствующей углу 2π , уложится не целое число
αn
105