Материал: ТММ в_авиастроении
Сначала определяем передаточное отношение u(3) |
по формуле Виллиса (6.15) |
||||||||||||
|
|
|
|
|
|
|
1H |
|
|
|
|
|
|
u1H(3) = 1− u13(H) = 1 |
− u12(H)u(H2′3) =1− |
z2z3 |
=1 |
− |
99 101 |
= |
|
|
1 |
|
; |
||
|
|
|
10000 |
||||||||||
|
|
|
|
z1z2′ |
100 100 |
|
|
||||||
Тогда u(3) = |
1 |
|
=10000. |
|
|
|
|
|
|
|
|
|
|
u(3) |
|
|
|
|
|
|
|
|
|
|
|||
H1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
1H |
|
|
|
|
|
|
|
|
|
|
|
|
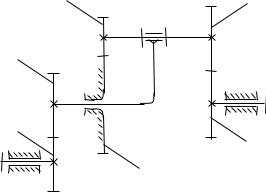
Пример 3. Определить передаточное отношение u15 сложного зубчатого |
|||||||||||||
механизма (рис. 6.11), если числа зубьев |
z1 = 18, z2 |
= |
54; z3 = 98, z4 = 100; |
||||||||||
z4′ = 99; z5 = 99. Решение:
Данный механизм представляет собой двухступенчатую передачу, у которой ступень 1 – 2 является простой, а ступень Н – 5 планетарной двухрядной с внешним зацеплением.
Следовательно, u |
|
|
= u |
|
u(3) |
,где u |
|
|
= − z2 , u(3) |
= |
|
1 |
= |
|
1 |
; |
||||||||||
15 |
12 |
12 |
u(3) |
1− u(H) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
H5 |
|
|
|
z |
H5 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
5H |
|
53 |
|
||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
u |
|
= − z2 |
|
1 |
|
= − 54 |
|
|
1 |
|
|
= −150. |
|
|
|
|
|
|
|
|||||||
15 |
|
|
z4′z3 |
|
|
|
99 98 |
|
|
|
|
|
|
|
|
|||||||||||
|
z |
1− |
|
|
|
|
18 |
1− |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
z5z4 |
|
|
|
|
|
99 100 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Так |
как |
u15 |
> 1, |
|
то |
данная передача |
является |
редуктором, а знак минус |
||||||||||||||||||
указывает на противоположное направление вращения зубчатых колёс 1 и 5.
4 |
4′ |
|
2 |
O4 |
|
|
|
H |
O2 |
O5 |
1 |
|
|
5 |
O1 |
3 |
|
Рис. 6.11. Схема сложного зубчатого механизма
96
6.3.3. Кинематика планетарной передачи типа3К
Для передачи типа 3К (рис. 6.4 а) составляются два выражения уравнения
Виллиса
ω1 − ωH = u14(H) |
и ω3 − ωH = u34(H) , |
|
|
|
|
|
|
|
|
|
||||||||||||||||
ω4 − ωH |
|
|
|
ω4 − ωH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
откуда исключением |
ωH |
определяется передаточное отношение механизма |
||||||||||||||||||||||||
при неподвижном центральном колесе 4. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
ω1 |
|
|
= u1(4)H = |
|
|
|
1+ |
z4 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
u13(4) = ω1 = |
ωH |
|
|
|
1− u14(4) = |
|
|
|
|
|
z1 |
. |
|
|
(6.22) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
ω3 |
ω3 |
|
|
u3(4H) |
|
1− u34(4) |
z2′z4 |
|
|
|
|
|
||||||||||||||
|
ωH |
|
|
|
|
|
|
|
|
|
|
|
1− z2z3 |
|
|
|
|
|
||||||||
Пример. Определить передаточное отношение планетарной передачи 3К |
||||||||||||||||||||||||||
(рис. 6.4 а), если z1 |
= 18; z2 = 36; z2′ = 33; z3 = 87, z4 = 90. |
|
||||||||||||||||||||||||
Решение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточное |
|
|
отношение |
|
передачи |
|
u(4) |
при |
неподвижном колесе 4 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
|
|
||
определяется по формуле (6.22) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
1+ |
z4 |
|
|
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
u13(4) = 1− u14(4) = |
|
|
|
|
|
1+ |
|
|
|
|
|
6 |
|
|
|
|||||||||||
z1 |
|
|
|
= |
|
|
|
|||||||||||||||||||
|
|
= |
|
18 |
|
|
|
=116. |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
1− u34(4) |
|
|
|
z2′z4 |
|
|
|
|
33 90 |
|
|
|
|
|
55 |
|
|
|
||||||||
|
1− z2z3 |
|
1− 36 87 |
|
1− |
58 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
Следовательно, передача является редуктором, в котором направление вращения зубчатых колёс 1 и 3 совпадают.
6.3.4. Кинематика замкнутых дифференциальных передач
Для замкнутых дифференциальных передач (рис. 6.5 в) необходимо дополнительно к уравнению Виллиса (6.1) составить уравнение связи между угловыми скоростями замыкаемых звеньев [5], [12]:
ω3 |
|
ω3′ |
|
(6.23) |
|
= |
= u3′5 = |
z4z5 |
. |
||
|
|
|
|||
ωН |
ω5 |
z3′z4′ |
|||
Решив его совместно с (6.1), получим
97
u1Н = u15 =1− u13(H) + u13(H)u3′5 ,
или в сокращённой записи
u = u(3) + u(H) , где u(3) =1− u(H);u(H) = u(H)u ′ .
15 15 15 15 13 15 13 3 5
В общем случае
(6.24)
(6.25)
uad = uad(b) + uad(H) , |
(6.26) |
где а, b и Н – центральные звенья дифференциальной ступени, а – входное
звено, не связанное со звеном замыкания; d – выходное звено (может совпадать со звеном b или Н дифференциальной ступени).
Таким образом, передаточное отношение замкнутой дифференциальной передачи от звена а, не входящего в дополнительную связь со звеном замыкания, равно сумме двух передаточных отношений, каждое из которых определяется в предположении, что одно из центральных звеньев дифференциальной ступени условно остановлено, а мешающие вращению связи удалены.
Для передачи, изображенной на рис. 6.5 в
u |
(b) |
= u(3) |
= |
1− u(H) = 1+ |
z3 |
, |
|
|
|
|
|
|
|
|||||||||||
ad |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
15 |
|
|
|
|
|
13 |
|
|
z1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
(H) |
|
(H) |
|
|
(H) (H) |
|
|
|
|
|
|
|
z5 |
|
z3z5 |
|
||||||
|
|
|
|
|
|
|
|
z3 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uad |
|
= u15 |
|
|
= u13 u3′5 = |
− z |
− z |
= z z . |
||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
3′ |
|
1 3′ |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Следовательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
u |
|
= u(3) |
+ u(H) |
=1+ z3 |
+ z3z5 . |
|
|
|
|
(6.27) |
||||||||||||||
|
|
15 |
|
15 |
|
|
|
15 |
|
z1 |
|
|
z1z3′ |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
При входном звене d, связанным со звеном замыкания или являющимся |
||||||||||||||||||||||||
звеном замыкания, справедлива обратная формула |
||||||||||||||||||||||||
1 |
|
= |
1 |
|
|
+ |
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
(6.28) |
|||
|
u |
da |
|
u(b) |
|
|
|
u(H) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
da |
|
|
|
|
da |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если в замкнутом дифференциальном механизме имеется несколько контуров замыкания, то число слагаемых в формуле (6.25) всегда на единицу больше числа контуров.
Пример. Определить передаточное отношение u16 редуктора двигателя
98
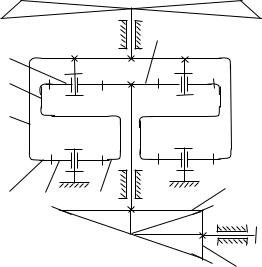
вертолёта МИ – 6 (рис. 6.12), если z1 = 31, z2 = 68; z2′ = 31; z3 = 29, z4 = 89; z4′ = 48; z5 = 29; z6 = 106.
|
|
|
2′ |
3 |
|
|
|
4 |
|
|
|
H |
|
|
|
6 |
5 |
4′ |
2 |
|
1 Рис. 6.12. Схема редуктора двигателя вертолёта МИ – 6
Решение. Редуктор представляет собой сложный зубчатый механизм, состоящий из простой конической передачи 1 – 2 и замкнутой дифференциальной передачи 2′ – Н(6). Следовательно, u1Н = u16 = u12u2′6. Передаточное отношение
простой конической передачи равно u12 = z2 . Передаточное отношение замкнутой z1
дифференциальной передачи определяется по формуле (6.26)
u ′ = u(4′ ) + u(H′ ) , 2 6 2 6 2 6
(4) |
(H) |
|
z4 |
(H) |
(H) |
(H) |
|
|
|
|
|
|
|||||||
где u2′6 |
=1− u2′4 |
=1+ |
|
, u2′6 |
= u2′4 |
u4′6 |
= |
− |
|
z2′ |
|||||||||
|
|
|
|
|
|
|
|
Тогда
|
|
z2 |
|
|
z4 |
|
|
|
|
|
|
|
68 |
|
89 |
|
89 106 |
|
||||
u |
= |
|
+ |
+ |
z4z6 |
= |
+ |
+ |
= |
|||||||||||||
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||||
z |
z |
|
z |
|
z |
|
|
31 |
31 48 |
|||||||||||||
16 |
|
|
|
2 |
|
2′ |
|
|
31 |
|
|
|
|
|||||||||
|
|
1 |
|
|
|
|
|
|
4′ |
|
|
|
|
|
|
|
|
|
|
|||
2,193 (1+ 2,871+ 6,339) = 2,193 10,21= 22,3895.
|
|
|
|
|
|
|
z4z6 |
|
|||
z4 |
|
− |
z6 |
|
|||||||
|
|
|
|
|
= |
|
|
|
. |
||
|
|
|
|
|
|
|
|
||||
z |
|
|
z |
|
z |
z |
|
||||
|
|
|
|
|
|
|
|
||||
|
2′ |
|
|
4′ |
2′ |
|
4′ |
|
|||
|
|
|
|
|
|
|
|||||
6.3.5. Кинематика волновых передач
Передаточное отношение одноступенчатой волновой передачи с одним
99
жестким колесом (рис. 8а) определяется так же, как и для планетарной передачи. При остановленном жестком звене (ωс = 0) получим
u(C) |
= 1 |
− u(H) |
= − zC − zF . |
|
|
(6.29) |
||||||||
FH |
|
|
|
FC |
|
|
|
zF |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
Знак минус перед выражением передаточного отношения означает, что |
||||||||||||||
генератор Н и вал гибкого колеса имеют различные направления вращения. |
||||||||||||||
При остановленном гибком колесе (ωF = 0 ) имеем |
||||||||||||||
u(F) |
= |
|
1 |
= |
|
zC . |
|
|
(6.30) |
|||||
HC |
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
− u(FCH) |
|
zC − zF |
|
|
|
||||||||
Из формулы следует, что генератор волн и жесткое колесо имеют одинаковые |
||||||||||||||
направления вращения. |
|
|
|
|||||||||||
Разность чисел зубьев zC − zF |
должна быть кратной числу волн К. Обычно |
|||||||||||||
принимают |
zC − zF =К. Тогда для |
|
двухволновой передачи (К=2) передаточное |
|||||||||||
отношение равно: |
|
|
|
|
|
|
|
|
|
|
||||
u(C) |
= − |
2 |
; u(C) = − |
zF |
= −0,5 z |
|
; |
(6.31) |
||||||
|
|
F |
|
|||||||||||
FC |
|
|
|
FH |
2 |
|
|
|
|
|
||||
|
|
|
zF |
|
|
|
|
|
|
|
||||
u(HCF) = 0,5zC . |
|
|
|
|
|
|
|
|
|
(6.32) |
||||
6.3.6.Планы линейных и угловых скоростей цилиндрических
планетарных передач.
Метод построения планов линейных и угловых скоростей предложил Л.П. Смирнов. В основу положена зависимость окружной скорости вращательного движения от радиуса вращения. При сложном движении сателлита радиус измеряется от мгновенного центра вращения.
Построение плана линейных и угловых скоростей рассмотрим на примере сложного зубчатого механизма, изображенного на рис. 6.13.
100