Материал: ТММ в_авиастроении
2
3
 Н
Н
ω 1
ω 3 ω н
1 
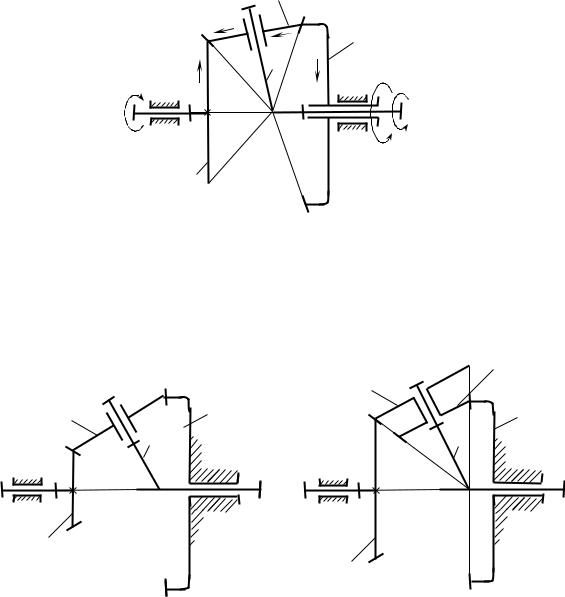
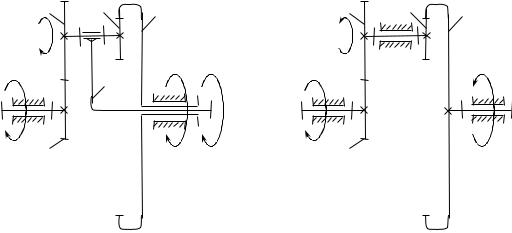
Рис. 6.2. Схема дифференциальной передачи с коническими колесами
Планетарная передача имеет одну степень подвижности и одно из центральных колес неподвижно (табл. 5.1, рис. 6.3).
|
|
|
О2 |
2' |
|
|
|
|
|
|
О2 |
|
2 |
|
2 |
3 |
|
|
3 |
|
Н |
|
|
Н |
|
О3 |
О1 |
|
О3 |
|
Он |
|
|
Он |
1 |
|
|
|
|
|
|
|
1 |
|
Рис. 6.3. Схемы планетарных передач с коническими колесами
Планетарная передача может иметь два или три центральных колеса. При наличии трех центральных колес планетарная передача относится к типу ЗК (рис. 6.4).
Дифференциальные передачи с тремя центральными колесами применяется весьма редко.
Замкнутые дифференциальные передачи получили широкое распространение в авиационном редукторостроении, например, в редукторе ТВВДД-27. Наиболее распространенными являются трехступенчатые замкнутые передачи, в которых одна ступень дифференциальная (рис.6.5). Два из трех основных звеньев
86
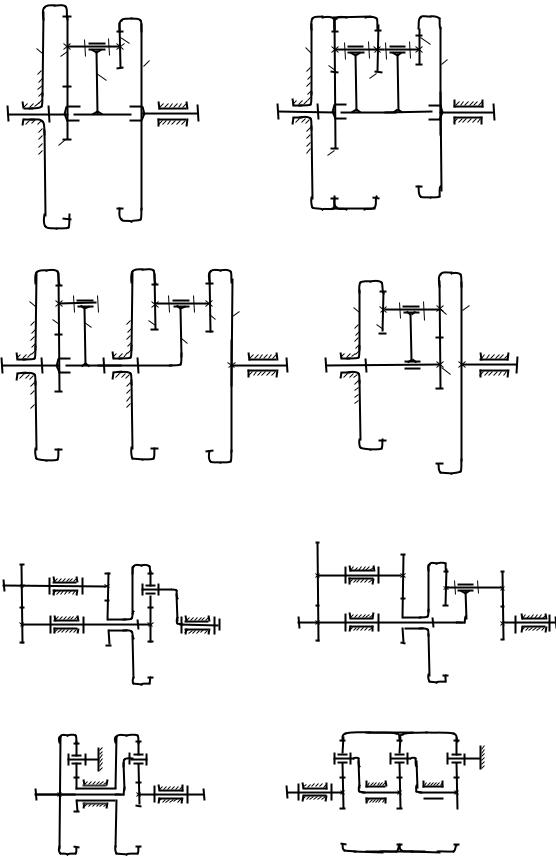
дифференциальной ступени соединены между собой с помощью дополнительной простой зубчатой передачи.
4
2
1
4
2
 1
1 
4'
5
2' 3 |
4 |
2' |
3 |
|
2 |
||||
|
|
|
||
H |
|
2 |
|
1
а |
|
|
б |
|
3 |
3 |
4 |
2 |
|
||
2' |
2' |
2' |
|
H |
H |
|
|
|
|
|
|
|
|
|
1 |
в |
|
г |
|
|
Рис. 6.4. Схемы передач типа 3К |
|
|
|
|
3 |
4' |
4 |
2' |
|
4 |
|
3 |
|
2 |
3' 2 Н |
|
3' |
|
|
3 |
H |
с |
||
|
|
|
|
|
1 |
α |
|
|
а |
|
|
|
в |
1 |
|
|
|
|
|
а |
б |
5 |
4 |
3 |
|
3 |
|
|
|
|
|||
|
3' |
H |
2 |
2 |
н1 |
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
6 |
9 |
|
|
3 Н2 |
8 |
4 




 7
7
в |
г |
Рис 6.5. Схемы замкнутых передач
87
Относительно недавно в авиационной и космической отрасли получили распространение волновые зубчатые передачи[11]. В отличие от планетарных или дифференциальных передач волновые имеют гибкое колесо F, которое может деформироваться.
Устройство, вызывающее деформацию, называется генератором Н (рис 6.6). Принцип действия волновых передач основан на преобразовании движения за счет перемещения волны деформации гибкого колеса. Жесткое колесо обозначается С.
К основным достоинствам волновой передачи можно отнести:
1.Малые массы и габаритные размеры при большой нагрузочной способности. Это связано с тем, что одновременно в зацеплении находится 20–40 % общего числа зубьев, а нагрузки на валы и опоры невелики.
2.Высокая кинематическая точность, которая обеспечивается многопарностью зацепления и наличием нескольких зон контакта зубьев.
3.Большое передаточное отношение одной ступени (i = 80...300).
4.Возможность передачи движения из герметизированного пространства.
5.Достаточно высокий КПД (η = 0,8...0,9 ) при работе передачи в качестве
редуктора.
6. Возможность использования не только в качестве редуктора или мультипликатора, но и в качестве дифференциала.
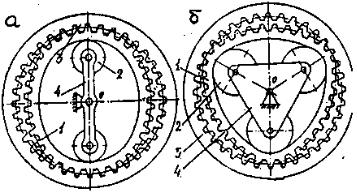
Рис.6.6. Схемы одноступенчатых волновых передач: а) двухволновая с роликовым генератором; б) трехволновая с роликовым генератором
88
К недостаткам волновых передач можно отнести: сложность изготовления гибкого колеса и генератора волн, большое значение минимального передаточного отношения.
Различают волновые передачи двухволновые, в которых зоны зацепления создаются генератором с двумя роликами (рис. 6.6 а) или дисковым генератором (рис. 6.7 б), либо кулачковым генератором (рис. 6.7 а).
W |
0 |
W |
|
0 |
|
e |
e |
a |
б |
|
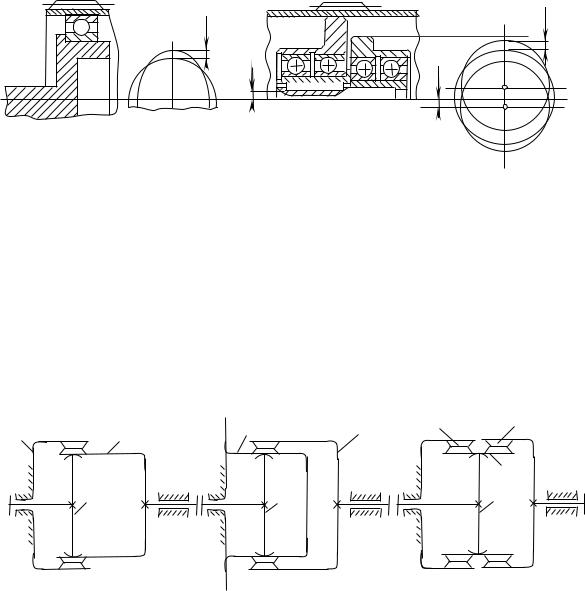
Рис. 6.7. Схемы генераторов: |
|
a – кулачкового; б –.дискового |
В трехволновой передаче зоны зацепления создаются генератором с тремя роликами (рис. 6.6 б).
Кроме того, волновые передачи бывают с одним (Рис. 6.8 а,б), двумя (Рис. 6.8 в) или тремя жесткими колесами, а также применяются замкнутые волновые передачи.
3(С) |
2(F) |
2(F) |
3(С) |
3(С) |
4(С) |
|
|
|
|
|
2(F) |
|
1(H) |
|
1(H) |
|
1(H) |
а |
б |
в |
Рис. 6.8. Кинематические схемы волновых передач
6.3. Кинематика сателлитных передач
Для определения угловых скоростей или частоты вращения зубчатых колёс, а
89
также передаточного отношения сателлитной передачи применяется метод обращения движения (метод Виллиса), который заключается в следующем: всем звеньям механизма условно сообщается дополнительная угловая скорость, обратная и численно равная угловой скорости водила H (–ωн).
Тогда водило становится условно неподвижным, а сателлитная передача превратится в соосный простой механизм с неподвижными в пространстве осями вращения зубчатых колёс, называемый обращённым механизмом, (рис. 6.9 б).
2 |
2′ |
3 |
|
|
2 |
2′ |
3 |
ω2 |
|
|
ω2 |
– ωH |
|
|
|
|
|
H |
|
|
|
|
|
ω1 1 |
|
ω3 ωH |
ω1 |
– ωH |
1 |
|
ω3 – ωH |
|
|
|
|
|
|
a |
б |
Рис. 6.9. Схемы передач
а– дифференциальной двухрядной; б – обращенного механизма
6.3.1.Кинематика дифференциальной передачи
Рассмотрим применение метода Виллиса на примере двухрядной дифференциальной передачи (рис. 6.9 а).
Пусть ω1, ω2, ω3 и ωH – угловые скорости звеньев, а z1, z2, z2′ и z3 – числа зубьев рассматриваемой передачи. После применения метода Виллиса звенья обращённого механизма (рис. 6.9. б) будут иметь следующие угловые скорости (табл. 6.1)
90