Материал: ТММ в_авиастроении
14. Радиусы кривизны эвольвент сопряжённых профилей
ρa |
|
= 0,5 |
da2 |
|
− dв2 |
=0,5dв |
|
tgαa = 0,5 118,46242 − 90,210492 = 38,3908 мм; |
||||
|
1 |
|
1 |
1 |
|
|
1 |
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ |
a |
|
= 0,5 |
|
d2 |
|
− d2 |
=0,5 |
190,46242 −157,868362 = 53,2764 мм; |
|||
|
2 |
|
|
a |
2 |
в |
2 |
|
|
|
|
|
ρp1 = aw sinαw − ρa2 =140 0,463693 − 53,2764 =11,6406 мм;
ρp2 = aw sinαw − ρa1 =140 0,463693− 39,3908 = 26,5262 мм.
15. Коэффициент торцевого перекрытия
εα = |
ρa |
1 |
|
+ ρa2 |
|
|
− aw sinαw |
= |
38,3908 |
+ 53,2764 |
−140 |
0,46369 |
=1,133. |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
pв |
|
|
|
|
|
|
|
|
|
23,6162 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
16. Коэффициенты удельного скольжения |
|
|
|
||||||||||||||||||||||||||
ϑa |
= 1− |
|
ρp2 z1 |
|
|
= 1− |
26,5262 12 |
|
|
= 0,605; |
|
|
|
||||||||||||||||
|
ρa z2 |
|
|
38,3908 |
|
21 |
|
|
|
|
|||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϑa2 |
= 1− |
ρp1 z2 |
|
|
= 1− |
11,6406 21 |
= 0,618; |
|
|
|
|||||||||||||||||||
ρa2 z1 |
|
|
53,2764 |
12 |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
ϑp |
= 1− |
|
|
ρa2 z1 |
|
|
|
= 1− |
53,2764 12 |
|
= −1,615; |
|
|
|
|||||||||||||||
|
|
ρp1 z2 |
|
|
11,6406 |
|
21 |
|
|
|
|
||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϑp2 |
= 1− |
ρa z2 |
|
|
= 1− |
|
38,3908 21 |
= −1,533. |
|
|
|
||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρp2 z1 |
|
|
|
|
|
|
|
26,5262 12 |
|
|
|
|
|
||||||||
17. Размер по общей нормали |
|
|
|
|
|
|
|
||||||||||||||||||||||
zn |
= |
z1 |
|
+ 0,5 = |
12 |
+ 0,5 =1,833. Принимаем zn = 2; |
|
|
|||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||
1 |
9 |
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
W1 = (zn1 |
−1)pв + Sв1 = (2 −1) 23,6162 +16,4147 = 40,031мм; |
|
|||||||||||||||||||||||||||
zn2 = z92 + 0,5 = 219 + 0,5 = 2,833. Принимаем zn2 = 3;
W2 = (zn2 −1)pв + Sв2 = (3 −1) 23,6162 + 17,4228 = 64,655 мм .
5.10. Построение картины зацепления
Подсчитав все размеры по формулам таб. 5.3., приступают к вычерчиванию
81

картины зацепления (рис.5.1). Масштаб построения выбирают таким, чтобы высота зуба была не менее 40…50 мм. Рекомендуется выбирать масштаб или масштабный коэффициент в соответствии с ГОСТ 2.302– 68.
Прежде всего, наносят в масштабе межосевое расстояние и все окружности. Точка касания начальных окружностей есть полюс зацепления. Общая касательная к основным окружностям, проходящая через полюс, есть линия зацепления. Профиль зуба можно построить как развертку основной окружности, либо по точкам, используя рассчитанные толщины зубьев Sa,S,Sw ,Sв .
Отложив от полюса в масштабе толщину Sw , разделив ее пополам, проводят ось симметрии зуба. От этой оси на соответствующих окружностях откладывают толщины, и полученные точки соединяют с помощью лекала. Это и будет эвольвентный профиль зуба.
Если df < dв , то зуб на этом участке строят по радиальной прямой. Сопряжение профиля зуба с окружностью впадин выполняют радиусом ρ f = 0,38m. Отложив по делительной окружности шаг, с помощью шаблона строят 2 – 3 зуба. Активный участок линии зацепления AB определяется пересечением линии зацепления с окружностями вершин шестерни 1 и колеса 2.
При указанном на рисунке направлении вращение шестерни контакт зубьев начнется в точке A с зацеплением точки p1 на ножке шестерни и точки a2 на головке колеса. Закончится зацепление в точке B контактом точек a1 и p2 . Дуги эвольвент a1p1 и a2p2 есть активные участки профилей зубьев. На размерных линиях диаметров зубьев необходимо указывать числовые значения с точностью не менее 5 значащих цифр, например, O/ 90,211(dв1 ) или O/ 190,462(da2 ) . На основании результатов расчетов удельных скольжений Va1 ,Va2 ,Vp1 ,Vp2 в точках a1,p1,a2 ,p2
строят график удельных скольжений. Для удовлетворительной работы передачи удельное скольжение на ножке зуба не должно превышать
ϑmax = 3...6 при Vокр =1...20мс ,
ϑ =1...5 при Vокр > 20мс ,
82
где Vокр = 0,5 ω d.
Согласно ГОСТ 2.403 – 75 в правом верхнем углу листа ( чертежа зацепления) должна располагаться таблица с основными параметрами зацепления, состоящая из трех частей, отделенных одна от другой сплошными основными линиями: 1 часть – основные данные , 2 часть – данные для контроля, 3 часть – справочные данные (Рис. 5.9).
Рис. 5.9 Таблица основных параметров зацепления
83
6. Проектирование сателлитных передач
6.1. Общие сведения
Сателлитные зубчатые передачи, обладающие существенными преимуществами перед простыми, получили широкое распространение в космической, авиационной, автомобильной и приборостроительной отраслях промышленности.
Основное преимущество – возможность получить весьма большое передаточное отношение при малых габаритах и весе передачи. В авиации, например, применяли планетарный механизм к винту переменного шага с передаточным отношением i = 22446.
Кроме этого, сателлитные передачи отличаются высокой надежностью, малыми потерями на трение и лучшими, чем в простых передачах, виброакустическими свойствами. В сателлитных передачах, выполняемых всегда по соостной схеме, центральный вал разгружен от изгиба, зубчатые колеса имеют лучшее распределение нагрузки по ширине зуба.
К недостаткам таких передач следует отнести некоторую конструктивную сложность, трудность сборки передачи, сложность подбора чисел зубьев, обеспечивающих выполнение заданных условий, большие потери на трения в некоторых типах передач.
84
6.2. Классификация сателлитных передач
Сателлитными называются зубчатые передачи, имеющие звенья, геометрические оси которых перемещаются в пространстве.
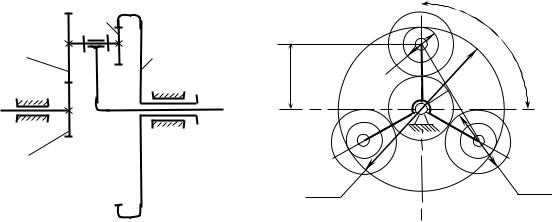
Звено, на котором установлены зубчатые колеса с подвижными в пространстве осями, называется водилом и обозначается буквой Н. (рис. 6.1)
|
2' |
2 D2 |
3 |
H
D1 
1
w12 α  О3 Он
О3 Он
О2 
|
2π |
d w2' |
аn |
|
|
О |
К |
|
О2' |
dw3 |
d w2 |
Рис. 6.1. Схема дифференциальной двухрядной передачи с цилиндрическими колесами
Звено, состоящее из одного или нескольких зубчатых колес с подвижными в пространстве осями и совершающее сложное движение, называется сателлитом.
Неподвижная ось, вокруг которой вращается водило Н, называется основной осью. Зубчатые колеса 1 и 3, сцепляющиеся с сателлитами, оси которых совпадают с основной осью, называются центральными колесами.
Сателлитные передачи делятся на дифференциальные, планетарные, замкнутые дифференциальные и волновые.
Дифференциальной называется сателлитная передача, обладающая двумя или более степенями свободы и все зубчатые колеса которой подвижны (рис. 6.1.) В дифференциальных передачах применяются как цилиндрические, так и конические колеса (рис. 6.2).
85