Материал: 2277
всех точек плоскости, удаленных на расстояние R от некоторой фиксированной точки О (центра окружности).
Введение на плоскости системы координат позволяет опреде- |
|||
лять положение точки плоскости заданием двух чисел – ее координат, |
|||
а положение линии на плоскости определять с помощью уравнения |
|||
С |
|
|
|
(то есть равенства, связывающего координаты точек линии). |
|||
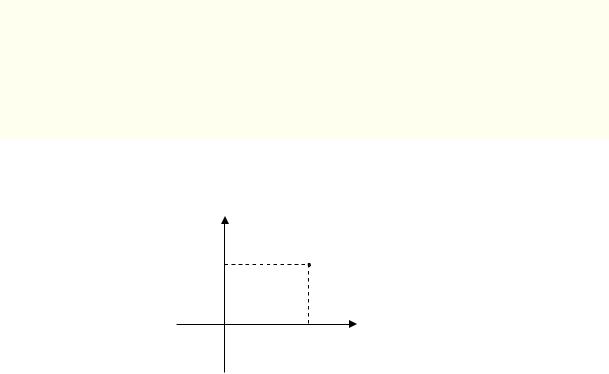
Рассмотрим на плоскости прямоугольную систему координат |
|||
Oxy (р с. 16). |
|
|
|
и |
|
|
|
|
Y |
|
|
|
y |
M(x,y) |
|
бА |
|||
|
O |
x |
X |
Рис. 16
Линия на плоскости есть совокупность точек этой плоскости, обладающих определенными свойствами, при этом точки, не лежащие на данной линии, этими свойствами не обладают. Уравнение линии определяет аналитически выраженное соотношение между координатами точек, лежащих на этой линии. Пусть это соотношение задано уравнением
F(x,y)=0. |
(6) |
Пара чисел, удовлетворяющая уравнению (6), – не произвольная: |
|
Д |
значе- |
если x задано, тоу не может быть каким угодно, то есть, |
|
ние у связано с х. При изменении х изменяется у, и точка с координата- |
|
ми (х, у) описывает данную линию. Если координатыИточки М0 (х0, у0) удовлетворяют уравнению (6), т.е. F (х0, у0)=0 – верное равенство, то точка М0 лежит на данной линии. Верно и обратное утверждение.
Уравнение, связывающее координаты x,y, называется уравнением линии L, если:
1) координаты (x, y) всякой точки М линии L удовлетворяют этому уравнению;
66

2) координаты (x,y) всякой точки, не лежащей на линии L, не удовлетворяют этому уравнению.
Уравнение линии позволяет изучение геометрических свойств линии заменить исследованием его уравнения (прил. 12).
С |
|
|
1 |
|
|
||
|
|
|
Точки пересечения линий |
||||
Чтобы выясн ть, есть ли у двух линий |
f1 x, y 0 и f2 x, y 0 |
||||||
общие точки, составляется система |
|
||||||
нений |
f |
x, y 0; |
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
f2 x, y 0. |
|
|
|
общ |
|
|||||
Ч сло |
х точек линий равно числу решений системы урав- |
||||||
. |
|
|
|
|
|
|
|
Пр мер |
|
А |
|||||
Найти точки пересечения прямых |
|
||||||
|
|
x у 5(1); |
x 2y 10(2); |
x y 10(3). |
|||
|
|
|
|
|
Д |
||
Решение. Составляем первую систему |
|
||||||
x y 5;
x 2y 10.
Решение системы это точка с координатамиИ0;5 . Найдена точка пересечения прямых 1 и 2.
Ищем теперь точки пересечения прямых 1 и 3, для этого решаем систему из уравнений x у 5 и x y 10.
Система несовместна. Значит, прямые 1 и 3 не пересекаются. Точку пересечения прямых 2 и 3 найдите самостоятельно.
Расстояние между двумя точками
Расстояние d между точками A1 x1; y1 и A2 x2;y2 вычисляется по формуле
67

d |
x2 x1 2 y2 y1 2 . |
|
|
|
||||
Пример |
|
|
|
|
|
|
|
|
С |
|
|
|
|
равно |
|||
Расстояние между точками A 0;3 и B 2;7 |
||||||||
d |
2 0 2 7 3 2 |
|
20 |
2 |
5 |
. |
||
координаты |
|
|
|
|
|||||||
|
|
|
|
Коорд наты точки середины отрезка |
|||||||
Пусть звестны |
|
точек A1 |
(x1 , y1 ),A2 (x2 , y2 ). |
||||||||
|
|
бА |
|||||||||
Коорд наты точки середины отрезка A1A2 равны полусумме |
|||||||||||
коорд нат его концов |
|
|
|
|
|
||||||
|
|
|
|
|
|
(x1 x2 , |
y1 y2 |
). |
|||
|
|
|
|
|
2 |
|
2 |
|
|
||
Координаты точки, делящей отрезок в отношении 0 |
|||||||||||
|
|
|
|
|
( |
x1 + x2 |
, y1 + y2 ). |
||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
1+ |
2Д |
||||
|
|
|
|
|
|
|
|
1+ |
|
||
|
|
|
|
|
Способы задания линии на плоскости |
||||||
Основные способы задания линий на плоскости: |
|||||||||||
1. y f x явный y 3x |
|
4x 7 ; |
И |
||||||||
|
|
||||||||||
2. x, y 0 неявный x2 |
y2 4 ; |
||||||||||
3. |
r |
|
r |
t векторный; |
|
|
|
|
|
||
4. x x t ; |
параметрический. |
|
|||||||||
|
y y t . |
|
|
|
|
|
|
|
|||
68
§18. Полярная система координат
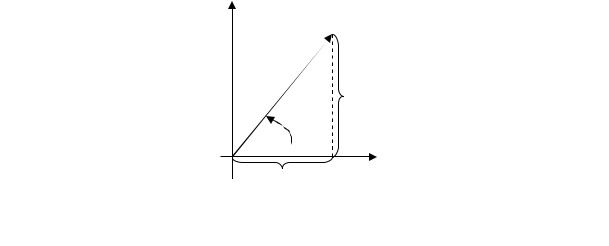
Полярная система координат – это система координат на плоскости, в которой каждая точка плоскости однозначно определяется двумя числами – полярным углом и полярным радиусом. Полярная система координат особенно полезна в случаях, когда связь между точками проще изобразить в виде радиусов и углов. В декартовой прямоугольной с стеме координат такие соотношения можно получить, только пр меняя тригонометрические уравнения.
плоскости
Полярная с стема координат определяется точкой O, называе-
мой полюсом, |
|
лучом, исходящим из полюса, называе- |
С |
|
|
мым полярной осью. Задается также единица масштаба. Любая точка |
||
М на |
определяется двумя полярными координатами: по- |
|
бА |
||
лярным рад усом r полярным углом |
(рис.17). |
|
Y |
M |
|
|
r |
|
|
y |
|
|
|
X |
|
|
|
O |
Д |
|
x |
|
|
Рис. 17
Полярным радиусом r точки M называется расстояние от полюса O до точки M (r = |OM|). Полярным угломИназывается угол между полярной осью и вектором OM (рис.17). Полярный угол измеряется в радианах и отсчитывается от полярной оси против часовой стрелки. Определённая таким образом радиальная координата r может принимать значения от нуля до бесконечности, а угловая координата может быть любой. Обычно полагают 0 ≤ < 2 π ,
или − π < ≤ π.
Полярные координаты начала координат − точки O: r = 0, угол не определен. У остальных точек r > 0 и угол определен с точностью до 2π.
69

Если полюс совпадает с началом прямоугольной декартовой системы координат, а полярная ось − с положительной частью оси абсцисс, то декартовы координаты x и y точки M выражаются через ее полярные координаты r и формулами
x= r cos ;
y= r sin .
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
Полярные коорд наты r и точки M выражаются через ее |
|||||||||||||
и |
|
|
|
|
|
|
|
|
|
|
|
||
декартовы коорд наты x |
y формулами |
|
|
|
|
||||||||
|
|
|
r x |
2 |
y |
2 |
; |
||||||
|
|
|
|
|
|
|
|
||||||
|
бАsin = |
||||||||||||
|
|
|
tg |
y |
. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
x |
|
|
|
|
||
Из эт х формул можно получить соотношения для вычисления |
|||||||||||||
угла ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos = |
|
|
|
x |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
x2 + y2 ; |
||||||||
|
|
|
Д |
||||||||||
|
|
|
|
|
|
|
y |
|
|
|
|
||
|
|
|
|
|
x2 + y2 . |
||||||||
Пример |
|
|
|
|
|
|
|
|
|
|
|
И |
|
Архимедова спираль – плоская кривая, сформированная траек- |
|||||||||||||
торией произвольной точки, которая |
|
равномерно движется по лу- |
|||||||||||
чу, берущему свое начало в O. Одновременно с этим луч равномерно вращается вокруг O. Таким образом, расстояние r пропорционально углу оборота луча. Обороту луча на одинаковый угол соответствует одно и то же увеличение расстояния r (рис. 18).
70