Материал: Частина 3
“Курс вищої математики. Частина 3.”
Теорія стійкості вирішень диференціальних рівнянь є одним з розділів якісної теорії диференціальних рівнянь, яка присвячена не знаходженню якого – або вирішення рівняння, а вивченню характеру поведінки цього рішення при зміні початкових умов або аргументу.
Цей метод особливо важливий, оскільки дозволяє робити вивід про характер рішення без безпосереднього знаходження цього рішення. Тобто навіть в тих випадках, коли вирішення диференціального рівняння взагалі не може бути знайдене аналітично.
Хай є деяке явище, описане системою диференціальних рівнянь:
dyi |
= f |
i |
(t, y , y |
2 |
,..., y |
n |
); |
(i =1,2,..., n) |
(1) |
|
|||||||||
dt |
1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
і початкові умови: yi (t0 ) = yi0 .
Для конкретного явища початкові умови визначаються досвідченим шляхом і тому неточні.
Теорема. (про безперервну залежність рішення від початкових умов)
Якщо права частина диференціального рівняння безперервна і по змінній у має обмежену приватну похідну (f y′ ≤ N ) на області прямокутника, обмеженого, то
рішення
y(t) = y(t,t0 , y0 ) що задовольняє початковим умовам, безперервно залежить від початкових даних, тобто для будь-якого, при якому якщо
y0 − y0 < 0, то y(t,t0 , y0 ) − y(t,t0 y0 ) < ε за умови, що
|
|
t0 −t |
|
|
< T; |
T < T0 , де |
|||||
|
|
|
|||||||||
|
|
1 |
|
|
|
b |
|
|
|
||
|
|
|
|
|
|
|
|||||
T0 |
= min a, |
|
, |
|
|
|
, |
M = max |
f (t, y) |
. |
|
|
|
|
|||||||||
|
|
N |
|
|
|
M |
(t, y) D |
|
|
||
Ця теорема справедлива як для одного диференціального рівняння, так і для системи рівнянь.
Визначення. Якщо ϕ(t) = {ϕ1 (t),ϕ2 (t),...,ϕn (t)} - вирішення системи
диференціальних рівнянь, то це рішення називається стійким по Ляпунову, якщо для будь-якогоε > 0 ∆ > 0 , таке, що для будь-якого вирішення y(t) = {y1 (t), y2 (t),..., yn (t)} тієї ж системи, початкові умови якого задовольняють нерівностям
|
yi (t0 ) −ϕi (t0 ) |
|
< ∆ |
|
|
|
|||
i = (1, n |
) |
||||||||
|
|
||||||||
справедливі нерівності |
t [t0 ,∞) |
||||||||
|
yi (t) −ϕi (t) |
|
< ε |
||||||
|
|
||||||||
(Ляпунов Олександр Михайлович (1857 – 1918) академік Петерб. АН)
Тобто можна сказати, що рішення (t) ϕстійке по Ляпунову, якщо близькі до
нього за початковими умовами рішення залишаються близькими і при t ≥ t0. |
|
||||||||||||||||||
Якщоlim |
|
yi (t) −ϕi (t) |
|
|
|
то рішення (t) ϕназивається асимптотика |
|||||||||||||
|
= 0, i = (1, n |
) , |
|||||||||||||||||
t→∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
стійким. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дослідження |
|
на |
стійкість |
по |
Ляпунову |
довільного |
вирішення |
||||||||||||
ϕ(t) = {ϕ (t),ϕ |
2 |
(t),...,ϕ |
n |
(t)} |
системи |
dyi |
= f |
i |
(t, y , y |
2 |
,..., y |
n |
); |
(i =1,2,..., n) можна |
|||||
|
|||||||||||||||||||
1 |
|
|
|
|
|
|
|
dt |
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
звести до дослідження на стійкість рівного нулю рішення деякій іншої системи, яка отримана з даною заміною невідомих функцій:
51

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
“Курс вищої математики. Частина 3.” |
||||
|
|
|
|
xi (t) = yi (t) −ϕi (t), |
|
i =1,..., n. |
|
|
|
|
||||||||||
Тоді: |
|
|
|
dyi |
|
|
dxi |
|
dϕi |
|
|
|
|
|
|
|||||
|
|
|
|
|
= |
+ |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
dt |
|
dt |
|
|
|
|
||||||||
|
dxi |
|
|
|
|
|
|
|
dt |
|
|
|
|
|||||||
|
= f |
[t, x |
+ ϕ (t),..., x |
n |
+ ϕ |
n |
(t)]− f |
[t,ϕ (t),...,ϕ |
n |
(t)], |
i =1,..., n. |
(2) |
||||||||
|
|
|||||||||||||||||||
|
dt |
i |
1 |
1 |
|
|
|
|
|
i |
1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Система (2) має тривіальне (рівне нулю) рішення xi (t) = 0.
Теорема. Вирішення ϕ(t) = {ϕ1 (t),ϕ2 (t),...,ϕn (t)} системи (1) стійке по Ляпунову
тоді і тільки тоді, коли стійко по Ляпунову тривіальне вирішення системи (2).
Це тривіальне рішення називається положенням рівноваги або точкою спокою.
Визначення. Точка спокою |
|
|
xi (t) = 0 системи (2) стійка по Ляпунову, якщо для |
||||||||||||
будь-якого ε > 0 ∆(ε) > 0 таке, що з нерівності |
|
||||||||||||||
слідує |
|
xi (t0 ) |
|
< ∆(ε) |
|
(i =1,...,n) |
|||||||||
|
|
|
|||||||||||||
xi (t) |
|
|
|
|
|
(i =1,...,n) |
t ≥ t0 . |
||||||||
|
|
|
|
< ε |
|||||||||||
|
|
|
|
||||||||||||
Теорема. (Теорема Ляпунова). Хай задана система |
|||||||||||||||
|
dyi |
= f |
(t, y , y |
2 |
,..., y |
n |
); |
(i =1,2,..., n) |
|||||||
|
|
||||||||||||||
|
dt |
|
i |
|
|
|
1 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
що має тривіальне рішення yi (t) = 0 .
Хай існує функція, що диференціюється, задовольняє умовам:
1)v( y1 ,..., yn ) ≥0 і v = 0 тільки при у1 = у2 = . = уn =0, тобто функція v має мінімум на початку координат.
2)Повна похідна функції v уздовж фазової траєкторії (тобто уздовж вирішення yi(t) системи (1)) задовольняє умові:
|
dv |
|
n |
∂v |
|
∂yi |
|
n |
∂v |
|
|
||
|
= |
∑ |
|
|
= ∑ |
fi (t, yi ,..., yn ) ≤ 0 |
при |
||||||
|
|
|
|
∂t |
|
||||||||
|
dt |
= |
∂y |
i |
|
= |
∂y |
i |
|
||||
|
|
|
i 1 |
|
|
|
|
i 1 |
|
|
|||
Тоді точка спокою yi ≡ 0, |
i =1,..., n |
стійка по Ляпунову. |
|
||||||||||
Якщо ввести додаткову вимогу, щоб зовні скільки завгодно малій околиці |
|||||||||||||
початку координат (y12 +... + yn2 |
|
≥ ∆) виконувалася умова |
|
||||||||||
|
|
|
|
|
|
|
∂v |
≤ −β < 0, (t ≥ t0 ), |
|
||||
|
|
|
|
|
|
|
∂t |
|
|
|
|
|
|
де β - постійна величина, то точка спокою yi ≡ 0, i =1,..., n |
асимптотика стійка. |
||||||||||||
Функція v називається функцією Ляпунова.
Класифікація точок спокою.
Розглянемо систему двох лінійних диференціальних рівнянь з постійними коефіцієнтами
dxdt = a11 x + a12 y
dy = a21 x + a22 ydt
Характеристичне рівняння цієї системи має вигляд:
52
“Курс вищої математики. Частина 3.”
|
a11 −λ |
a12 |
|
= 0 |
|
|
|||
|
a21 |
a22 −λ |
|
|
Розглянемо наступні можливі випадки:
1) Коріння характеристичного рівняння дійсне, негативне і різне.
λ1 < 0, λ2 < 0, λ1 ≠ λ2 .
Точка спокою x = y ≡ 0 буде стійка. Така точка спокою називається стійким вузлом.
2) Коріння характеристичного рівняння дійсне і
λ1 = 0, λ2 < 0 або λ1 = λ2 < 0 .
В цьому випадку точка спокою також буде стійка.
3) Хоч би один з коріння λ1 ,λ2 позитивний.
В цьому випадку точка спокою x = y ≡ 0 нестійка, і таку крапку називають нестійким сідлом.
4) Обидва корені характеристичного рівняння позитивні λ1 > 0, λ2 > 0 .
В цьому випадку точка спокою x = y ≡ 0 нестійка, і таку крапку називають нестійким вузлом.
|
|
λ1t |
|
|
λ2t |
|
|||
Якщо отриманого вирішення |
x = C1α1e |
+ C2 |
β1e |
системи виключити параметр t, то |
|||||
|
|
|
|
||||||
|
|
λ1t |
|
|
|
λ2t |
|||
|
|
|
|
|
|
|
|||
|
y = C1α2 e |
+ C2β2 e |
|
||||||
|
|
|
|
||||||
отримана функція y = ϕ(t) дає траєкторію руху в системі координат XOY. |
|||||||||
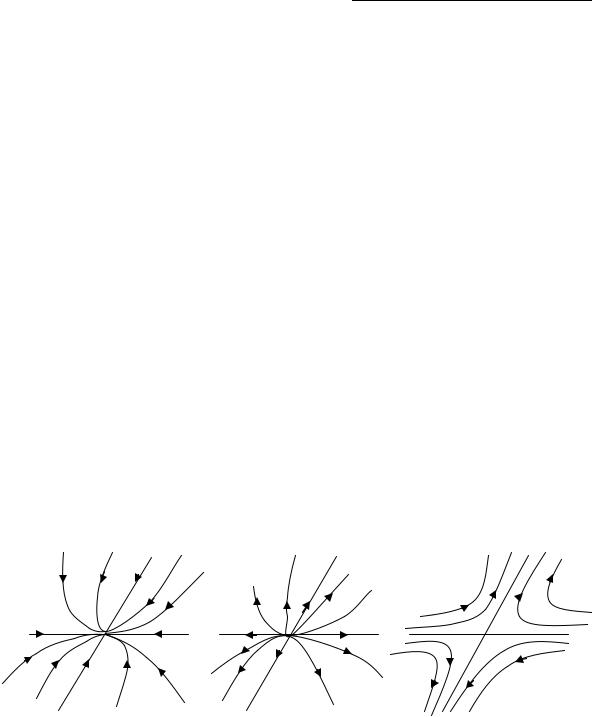
Можливі наступні випадки: |
|
|
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
β |
|
|
α α
α
Стійкий вузол. Нестійкий вузол. Сідло.
5) Коріння характеристичного рівняння комплексне λ1 = p +iq, λ2 = p −iq .
Якщо р = 0, тобто коріння чисто уявне, то точка спокою (0, 0) стійка по Ляпунову. Така точка спокою називається центром.
Якщо p< 0, то точка спокою стійка і називається стійким фокусом. Якщо p > 0, то точка спокою нестійка і називається нестійким фокусом.
Рівняння математичної фізики.
Рівняння в приватних похідних.
53

“Курс вищої математики. Частина 3.”
Визначення. Диференціальним рівнянням в приватних похідних називається рівняння щодо невідомої функції декілька змінних, її аргументів і її приватних похідних різних порядків.
|
|
|
|
|
|
|
∂u |
|
∂u |
|
∂u |
|
|
∂k u |
|
|
|
|
|||
F x |
, x |
|
,..., x |
|
, |
|
, |
|
|
,..., |
|
|
,..., |
|
|
|
|
|
|
= 0 |
|
|
|
∂x |
∂x |
|
∂x |
|
∂ |
|
∂ |
|
|||||||||||
|
1 |
|
2 |
|
n |
|
|
2 |
|
n |
|
k1 |
kn |
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
x1 |
... |
xn |
|
|
||||
Порядком диференціального рівняння в приватних похідних називається порядок старшої похідної, що входить в це рівняння. Вирішенням рівняння буде деяка функціяu = u(x1 , x2 ,..., xn ) , яка обертає рівняння в тотожність.
Лінійні однорідні диференціальні рівняння в приватних похідних першого порядку.
Диференціальне рівняння в приватних похідних першого порядку від функції u = u(x1 , x2 ,..., xn ) можна в загальному вигляді записати як
|
|
|
∂u |
|
∂u |
|
∂u |
|
|
|||
|
, x2 |
,..., xn , |
, |
,..., |
|
= 0 |
||||||
∂x |
∂x |
|
∂x |
|
||||||||
F x1 |
2 |
|
|
|||||||||
|
|
|
1 |
|
|
|
|
n |
|
|||
Лінійне рівняння в приватних похідних має вигляд:
X |
|
(x , x |
|
,..., x |
n |
) |
∂u |
+ X |
|
(x , x |
|
,..., x |
n |
) |
∂u |
+... + X |
n |
(x , x |
|
,..., x |
n |
) |
∂u |
= 0 , |
(1) |
||
|
|
∂x |
|
|
∂x |
|
|
∂x |
|
||||||||||||||||||
|
1 |
1 |
2 |
|
|
|
2 |
1 |
2 |
|
|
2 |
|
1 |
2 |
|
|
n |
|
|
|||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
де Xi – деякі задані функції.
Очевидно, що одним з вирішень такого рівняння буде функція u = C.
Розглянемо систему рівнянь: |
|
dx1 |
|
|
|
dx2 |
|
|
|
|
|
|
|
|
|
|
dxn |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
= ... = |
; |
|
|
|
(2) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
X 2 |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
X1 |
|
|
|
|
|
|
|
|
|
|
|
|
X n |
|
|
|
|
|
||||||||
або |
dx1 |
= |
X1 |
; |
dx2 |
= |
X 2 |
; ... |
|
|
|
dxn−1 |
|
= |
X n−1 |
- така система називається нормальною. |
|||||||||||||||||||||
|
|
dxn |
|
|
|
|
dxn |
|
|
|
|||||||||||||||||||||||||||
|
dxn |
X n |
|
X n |
|
|
|
|
|
|
|
|
X n |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Загальне вирішення цієї системи має вигляд: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
= f |
(x |
n |
,C ,C |
2 |
,...,C |
n−1 |
) |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
x2 |
|
= f2 (xn ,C1 ,C2 ,...,Cn−1 ) |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
.......................................... |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
n |
−1 |
= |
f |
n−1 |
(x |
n |
,C ,C |
2 |
,...,C |
n−1 |
) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||
Якщо вирішити ці рівняння щодо постійних З, отримаємо: |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ϕ |
(x , x |
2 |
,..., x |
n |
) |
= C |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
ϕ2 (x1 , x2 ,..., xn ) = C2 |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
................................. |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
ϕ |
n−1 |
(x , x |
2 |
,..., x |
n |
) = C |
n−1 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Кожна з функцій ϕ є інтегралом системи (2). |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Теорема. |
Якщо ϕ(x1 , x2 ,..., xn ) |
|
|
|
|
|
- |
|
інтеграл |
системи (2), то функція |
||||||||||||||||||||||||||
u = ϕ(x1 , x2 ,..., xn ) - вирішення рівняння (1).
54

“Курс вищої математики. Частина 3.”
Класифікація основних типів рівнянь математичної фізики.
1) Хвилеве рівняння. (Рівняння коливань струни, електроколивання, крутильні коливання валу і ін.) Це просте рівняння гіперболічного типу.
∂2u |
= a |
2 ∂2u |
|
∂t 2 |
∂x2 |
||
|
2) Рівняння теплопровідності. (Рівняння Фурье) Це просте рівняння параболічного типу. Описує процеси теплопровідності, фільтрації рідини і газу, деякі питання теорії вірогідності.
∂u = a2 ∂2u ∂t ∂x2
3) Рівняння Лапласа. Це просте рівняння еліптичного типу. Описує магнітні і електричні поля, гідродинаміку, дифузію і ін.
∂2u |
+ |
∂2u |
= 0 |
|
∂x2 |
∂y2 |
|||
|
|
У цих рівняннях функція u залежить від двох змінних, проте, завдання може бути розширена для випадку три змінних:
1) |
Хвилеве рівняння: |
∂2u |
= a |
2 ∂2u |
+ a |
2 |
∂2u |
; |
|
|
|
||||||
∂t 2 |
|
∂x |
2 |
|
∂y2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2) |
Рівняння теплопровідності: |
∂u |
= a |
2 |
|
∂2u |
+ a |
2 |
∂2u |
; |
|||||||
∂t |
|
|
∂x2 |
|
∂y2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
3) |
Рівняння Лапласа: |
∂2u |
+ |
∂2u |
+ |
∂2u |
|
= 0 |
|
|
|
|
|
||||
∂x2 |
∂y |
2 |
∂z 2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Розглянемо докладніше кожне з цих рівнянь.
Рівняння коливань струни.
Визначення. У математичній фізиці струною називається тонка нитка, в якій можливе виникнення напруги тільки в подовжньому, але не в поперечному напрямі.
Хай кінці натягнутої струни закріплені в точках х = а і x = b, напругу, що виникає в ній, позначимо Т. Будем також вважати, що щільність струни постійна на всьому її протязі.
Допустимо, що у момент t0 = 0 струна виведена із стану рівноваги і здійснює малі коливання.
Відхилення струни в кожній крапці з координатою х у момент часу t позначимо
як
u = u(x,t) |
a ≤ x ≤ b, t ≥ 0 |
u
C
55