Предположим, что уравнение D(λ) = 0 имеет l корней в левой части комплексной плоскости и m корней в правой, причем l + m = n .
Тогда при изменении частоты ω от −∞ до +∞ угол поворота вектора D( jω)
будет равен сумме изменений аргументов элементарных векторов и составит величину
arg[D( jω)] = πl − πm = π(l − m). |
|
−∞ < ω < +∞ |
(4.19) |
Приведем формулировку принципа аргумента: изменение аргумента вектора |
D( jω) при изменении частоты ω от −∞ до +∞ равно разности (l − m) корней уравнения
D(λ) = 0 , лежащих соответственно в левой и правой части комплексной плоскости, умноженной на число π .
По углу поворота вектора D( jω) можно судить об устойчивости САУ.
Ниже будут рассмотрены основные частотные критерии устойчивости: критерий Михайлова, амплитудно-фазовый критерий Найквиста и его аналог - логарифмический критерий устойчивости.
Критерий Михайлова сформулирован русским ученым В.А. Михайловым в 1938 г. Критерий устойчивости Михайлова является геометрической интерпретацией
принципа аргумента и позволяет судить об устойчивости системы на основании некоторой кривой.
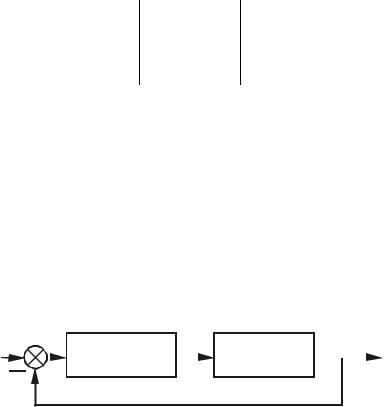
Рассмотрим полином
M (s) = an sn + an−1sn−1 + ... a1s + a0 ,
образованный из характеристического уравнения замкнутой системы, если исследуется устойчивость замкнутой системы, или образованный из характеристического уравнения разомкнутой системы, если исследуется устойчивость разомкнутой системы.
Заменив оператор s на jω , получим комплексный полином M ( jω), который после выделения мнимой и вещественной частей имеет вид:
M ( jω) = U (ω) + jV (ω) ,
где U (ω) и V (ω) - вещественная и мнимая части.
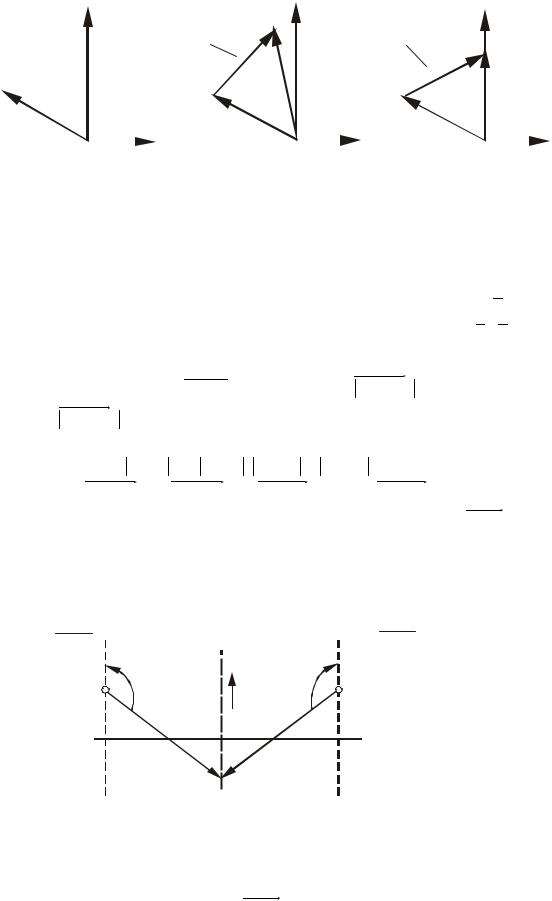
При фиксированном значении ω комплексное выражение M ( jω) можно представить вектором на комплексной плоскости, который называют вектором Михайлова.
При изменении значения ω в интервале −∞ ≤ ω ≤ +∞ вектор Михайлова будет
поворачиваться относительно начала координат и описывать траекторию на
комплексной плоскости (U , jV ) . Полученный график функции M ( jω) называется кривой Михайлова, или годографом Михайлова. По очертанию кривой Михайлова
можно судить о знаках вещественной части корней многочлена M ( jω) , т.е. об устойчивости САУ.
Критерий Михайлова: для того чтобы система была устойчивой, необходимо и
достаточно, чтобы вектор Михайлова M ( jω) при изменении параметра ω от −∞ до +∞ повернулся, нигде не обращаясь в нуль, вокруг начала координат против часовой стрелки на угол +πn , где n - степень характеристического многочлена.
Годограф Михайлова достаточно строить для частоты ω , изменяющейся только в диапазоне от 0 до +∞ , так как годограф симметричен относительно вещественной оси. В этом случае (для положительных значений частот) вектор Михайлова
устойчивой системы повернется на угол, в два раза меньший, т.е. равный +nπ / 2 , последовательно проходя n квадратов комплексной плоскости.
 ω
ω
