Материал: бархоткин системы автоматического управления
Запуск первого искусственного спутника Земли и начало космической эры дали новый толчок развитию техники управления. Возникла необходимость создания сложных высокоточных систем управления для ракет и космических аппаратов.
Возросшие требования к точности этих систем и желание минимизировать их массу обусловили повышенный интерес к теории оптимального управления. Именно поэтому
впоследние годы стали популярными методы анализа и синтеза, предложенные А.М. Ляпуновым, А.А. Красовским, Л.С. Понтрягиным, А.А. Фельдбаумом в России и Р. Беллманом в США.
Мировое признание получили фундаментальные труды по математической теории оптимальных процессов, созданные Л.С. Понтрягиным и его учениками в 50 - 60-е годы XX века.
Поскольку невозможно назвать всех выдающихся изобретателей, инженеров, математиков, внесших вклад в развитие ТАУ, так же как и перечислить все достижения
вэтой важной науке, приведем лишь краткие сведения о том, какие идеи и в какое время разрабатывали перечисленные выше ученые.
Приблизительно до 60-х годов XX века ТАУ имела ярковыраженную
инженерную направленность и базировалась преимущественно на рассмотрении процессов в системе "регулятор - объект управления".
Как системная наука ТАУ объединила многие методы инженерных направлений из области электро-, радиотехники, связи и энергетики, существенно развив их. Прикладную или инженерную ТАУ сейчас называют "классической", подчеркивая определенную завершенность ее как науки об управлении. Особенностью классической ТАУ является то, что она решает задачи оптимизации и адаптации "в малом", т.е. при малых отклонениях относительно заданного режима работы.
В80-х годах XX века широкое распространение получило применение ЭВМ в контуре систем управления, благодаря чему появилась возможность одновременного
измерения и управления многими параметрами с использованием сложных алгоритмов обработки информации. В настоящее время в США в системах цифрового управления функционирует более 400000 компьютеров.
Сейчас ТАУ продолжает интенсивно развиваться. Появление микропроцессоров высокой производительности, микросхем памяти большой емкости, возможность организации мультитранспьютерных сетей для реализации параллельных вычислений, с одной стороны, и необходимость обработки значительных массивов информации, применения базы знаний для формирования целенаправленной деятельности - с другой, привели к созданию интеллектуальных систем управления.
Основы ТАУ, которая названа "современной", заложены классической ТАУ и неразрывно связаны с ней. Современная ТАУ преследует цель оптимизации "в целом" применительно к сложным объектам управления. Она представляет собой совокупность методов и средств, обеспечивающих интеллектуальное управление.
Характерной особенностью такого управления является эффективное использование всех ресурсов системы при многокритериальной оптимизации процессов в условиях высокой степени неопределенности информации о свойствах объекта управления и среде его функционирования.
Результаты, полученные современной ТАУ, вышли за рамки технических систем. ТАУ имеет много практических приложений в биологии, биомедицине и протезировании. В организме человека иерархия систем управления простирается от
клеточного уровня до центральной нервной системы и включает в себя регуляцию температуры, сердечно-сосудистой деятельности и ритма дыхания. Таким образом,
моделирование биологических процессов приводит к построению систем управления высоких порядков и достаточно сложной структуры. В США устройства протезирования, построенные на базе последних достижений ТАУ, помогают миллионам инвалидов преодолеть их физические недостатки.
6
Наконец, большой интерес представляют попытки построения моделей процессов с обратной связью в социальной, экономической и политической сферах. Хотя эти модели разработаны еще недостаточно полно, они, скорее всего, будут востребованы уже в ближайшие годы.
Основной проблемой ТАУ является разработка методов анализа и синтеза автоматических систем, а именно:
1)разработка принципов построения автоматических систем;
2)математическое описание (алгоритмизация) процессов автоматического управления;
3)исследование структуры автоматических систем;
4)анализ устойчивости автоматических систем;
5)анализ качества процессов автоматического управления (точность работы, быстродействие, помехоустойчивость);
6)синтез автоматических систем - определение рациональной структуры и оптимальных параметров в соответствии с технико-экономическими требованиями к автоматизируемому процессу;
7)разработка экспериментальных методов исследования автоматических
систем.
В настоящее время созданы и формируются новые разделы ТАУ, которые включают широкие классы сложных автоматических систем, в том числе интеллектуальных.
В учебном пособии кратко изложены основные положения классической ТАУ, необходимые для последующего освоения ее новейших разделов.
7
Глава 1. Принципы построения, классификация и математическое описание процессов в автоматических системах
1.1. Теория управления. Основные понятия и термины
Кибернетика - это наука об общих закономерностях процессов управления в различных системах (механических, электрических, биологических, административных, социальных и т.д.). Технической кибернетикой называется наука об управлении техническими устройствами. Важным разделом технической кибернетики, ее базовой основой является ТАУ.
ТАУ - это наука о принципах построения автоматических систем и закономерностях протекающих в них процессов. ТАУ абстрагируется от физической природы и конструктивных особенностей систем. Задача ТАУ заключается в построении оптимальных или близких к ним работоспособных автоматических систем, выполняющих поставленные перед ними цели без участия человека.
Чтобы понять смысл и содержание ТАУ, необходимо усвоить ее основные понятия и термины.
Управление каким-либо объектом - это процесс воздействия на него с целью
обеспечения требуемого течения процессов в объекте или требуемого изменения его состояния. Основой управления является переработка информации о состоянии объекта в соответствии с целью управления.
Совокупность устройств, обеспечивающих управление каким-либо объектом, называют системой управления. Если функции всех элементов системы управления выполняются различными устройствами без непосредственного участия человека, то система управления является автоматической.
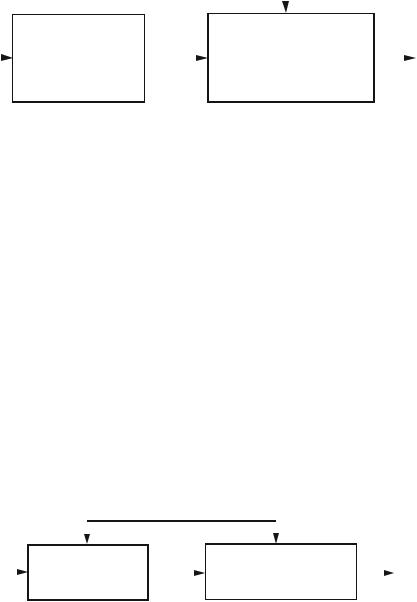
САУ может быть представлена двумя основными частями (рис.1.1): объектом управления (управляемая система) и устройством управления (управляющая система).
В качестве объекта управления может рассматриваться как управляемое техническое устройство (станок, паровая турбина, самолет и т.д.) или их совокупность, так и более простая система управления. В последнем случае речь идет о некоторой иерархической системе управления, в которой более сложная система управления включает в себя более простую как подсистему.
Для автоматического управления большое значение имеет внешняя среда, под которой будем понимать все то, что не входит в рассматриваемую систему.
Внешним или возмущающим воздействием f(t) называется воздействие со стороны среды на любой элемент (подсистему) системы управления, включая объект управления, затрудняющее достижение цели.
Управляющее воздействие u(t) - воздействие со стороны управляющей системы на объект управления, предназначенное для достижения цели управления.
Управление всегда имеет определенную цель. Цель управления - это то, что надо осуществить. Обычно она формулируется как ограничение на множество возможных состояний системы или как какой-либо показатель системы, который нужно поддерживать в заданных пределах либо максимизировать. Например, целью управления может быть поддержание на выходе схемы стабилизатора напряжения, равного 220 В, или перемещение мобильного робота по заданному дорожному полотну.
8
Задающее воздействие g(t) - воздействие на устройство управления (управляющую систему), предназначенное для достижения цели управления. Задающее воздействие g(t) определяет требуемый закон управления.
Состояние объекта управления определяют конкретными значениями управляемых величин. Управляемая величина x(t) - координата объекта управления, значение которой зависит от управляющего воздействия u(t) и показывает степень достижения цели управления. Координата объекта управления может быть представлена следующими параметрами: напряжением источника питания, температурой раствора, давлением воздуха, азимутом самолета в пространстве и т.д. С
точки зрения математического описания состояние объекта управления удобно представлять точкой, координатами которой являются значения параметров.
Под автоматическим управлением понимается автоматическое (без участия человека) осуществление совокупности воздействий, выбранных из множества
возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
С формальной точки зрения основная задача автоматического управления заключается в том, чтобы выработать управляющее воздействие u(t) таким образом, чтобы управляемая величина x(t) изменялась по заданному закону с определенной
точностью независимо от действия на автоматическую систему внешних возмущений f(t).
В основу ТАУ положена теория автоматического регулирования. Регулирование представляет собой простейшую разновидность управления. Автоматическим регулированием называется поддержание постоянной некоторой заданной величины, характеризующей процесс, или изменение ее по заданному закону.
1.2. Принципы автоматического управления
Принцип автоматического управления (регулирования) определяет алгоритм формирования управляющего воздействия в автоматической системе. Выбор того или иного принципа построения системы зависит от ее назначения, условий работы, возможностей получения необходимой рабочей информации, стабильности характеристик отдельных элементов и т.п. Одним из основных признаков, характеризующих принцип управления, является требуемая для выработки управляющего воздействия информация.
Информацию обычно подразделяют на начальную (априорную) и рабочую (текущую). Априорная информация может быть получена в результате
предварительного теоретического или экспериментального исследования системы управления. Текущая информация получается в результате наблюдения за ходом процесса управления.
Известны три фундаментальных принципа автоматического управления: принцип разомкнутого управления, принцип управления по возмущению и принцип обратной связи. Кроме того, разработан принцип комбинированного управления, сочетающий достоинства второго и третьего принципов. Таким образом, несмотря на многообразие автоматических систем, основополагающие принципы их построения немногочисленны.
Принцип разомкнутого управления состоит в следующем (см. рис.1.1). Пусть заранее известно, что параметры объекта управления и воздействие внешней среды
f (t) остаются постоянными или изменяются по определенному закону. Тогда по заданной функции x(t) можно однозначно определить соответствующее изменение во времени управляющего воздействия u(t) . В этом случае управление является
9
полностью априорным, т.е. осуществляется управляющим устройством при заведомо абсолютно точном знании всех внешних и внутренних условий работы.
Примером реализации этого принципа служит автоматическое управление токарным станком, изготавливающим детали одного определенного образца. При этом
положение резца задают как определенную функцию времени и осуществляют автоматическое перемещение его по этому закону.
|
|
|
|
f(t) |
|
|
g(t) |
Устройство |
u(t) |
Объект |
x(t) |
||
управления |
управления |
|||||
|
|
|
||||
|
(управляющая |
|
(управляемая |
|
||
|
система) |
|
система) |
|
||
Рис.1.1. Система автоматического управления
Принцип разомкнутого управления отличается простотой технической реализации, но оказывается малоэффективным при недостаточной априорной информации относительно характера внешних воздействий.
Принцип управления по возмущению заключается в том, что управляющее воздействие вырабатывается в зависимости от результатов измерения возмущения, действующего на объект. Системы, построенные на основе этого принципа, также работают по разомкнутой цепи, т.е. не имеют обратной связи.
Структурная схема автоматической системы, использующей принцип управления по возмущению, изображена на рис.1.2. На устройство управления
воздействует возмущение f (t) . Недостаточный объем априорной информации относительно f (t) восполняется текущей информацией о его изменении, поступающей в устройство управления. При этом управляющее воздействие u(t) формируется в
функции возмущающего воздействия f (t) :
u(t) = U [f (t)].
Величина и направление управляющего воздействия на объект должны быть такими, чтобы полностью или в значительной степени компенсировать влияние возмущающего воздействия.
g(t) |
|
|
u(t) |
|
f(t) |
x(t) |
|
|
|
||||
|
|
|
|
|||
Устройство |
Объект |
|||||
|
управления |
|
управления |
|
||
|
|
|
||||
Рис.1.2. Система, реализующая принцип управления по
возмущению
Основное достоинство принципа управления по возмущению - высокое быстродействие, поскольку в этом случае система реагирует непосредственно на причину, вызывающую изменение управляемой величины. Однако этот принцип
предполагает наличие полной априорной или текущей информации о внутренних и внешних условиях работы системы, что обычно не выполнимо. Как правило, учитывается действие одного или нескольких наиболее существенных возмущений, которые измеряются соответствующими датчиками.
Подобный принцип управления может быть реализован в системе стабилизации напряжения в синхронном генераторе при переменной электрической нагрузке на его
10