Материал: бархоткин системы автоматического управления
Ступенчатыми воздействиями являются изменение нагрузки в электрической |
|||
цепи при отключении электроприборов, внезапное изменение положения задающей оси |
|||
в следящих системах, сброс ускорителей или отключение маршевого двигателя ракеты. |
|||
По аналогии с сигналом "скачок по положению" можно рассмотреть |
|||
воздействия "скачок по скорости" и "скачок по ускорению". |
|
||
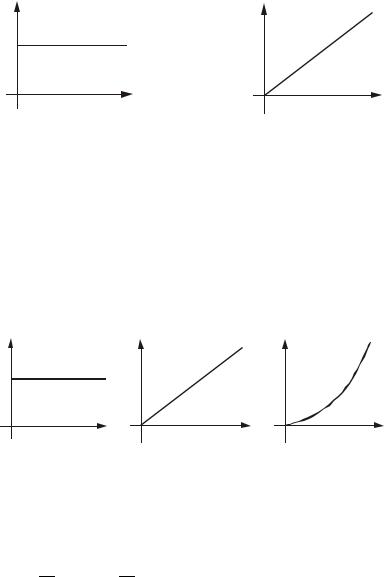
Единичный "скачок по скорости": v(t) = 1 при t ³ 0 и v(t) = 0 при t < 0 (рис.1.10). |
|||
v(t) |
|
z(t) |
|
1 |
|
|
|
0 |
t |
0 |
t |
а |
|
б |
|
Рис.1.10. Единичный "скачок по скорости" (a); изменение |
|
||
|
координаты входного сигнала (б) |
|
|
Изображения по Лапласу единичного и неединичного (v = const) "скачков по
Z(s) = |
1 |
|
Z(s) = |
v |
|
|
s2 и |
s2 . Изменение координаты |
|||||
скорости" имеют соответственно вид: |
|
|||||
входного сигнала представляется зависимостью: z(t) = vt.
Аналогично вводится единичный "скачок по ускорению". Соответствующие графики представлены на рис.1.11.
a(t) |
|
v(t) |
|
1 |
|
|
|
0 |
t |
0 |
t |
а |
|
|
б |
z(t) |
|
0 |
t |
|
в |
Рис.1.11. Единичный "скачок по ускорению" (а); изменение скорости (б) и координаты (в) входного сигнала
Изображения по Лапласу единичного и неединичного (a = const) "скачков по
ускорению" равны: Z(s) = s13 и Z(s) = sa3 . При этом изменения скорости и координаты входного сигнала принимают вид: v(t) = at и z(t) = at 2/2.
Типовое воздействие может иметь форму d-функции, т.е. прямоугольного
импульса большой амплитуды и весьма малой продолжительности по сравнению с ожидаемым временем переходного процесса. В реальных условиях такое воздействие имеет место, например, при внезапном появлении импульсной помехи на входе приемника телекодовой связи, кратковременном изменении напряжения в сети или попадании летательного аппарата в струю воздуха, движущуюся перпендикулярно траектории его движения.
d-функцию также называют единичной импульсной функцией, ее математическое представление:
d(t) = 0 при t ¹ 0, d(t) ® ¥ при t ® 0,
16
+∞
òd(t)dt =1
причем площадь -∞ |
. |
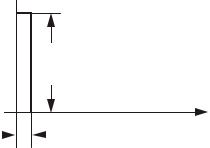
Графически точно δ-функцию изобразить невозможно. Условно ее представляют в виде прямоугольного импульса длительностью a и высотой 1/ a при a → 0 (рис.1.12). Изображение по Лапласу δ(t) равно единице.
δ(t) 
1/a
0 |
|
t |
|
|
|
|
|
a
Рис.1.12. Условное представление δ-функции
Реальный сигнал, как правило, имеет значительно более сложную форму. В
некоторых случаях его можно представить в виде ряда Фурье
|
a0 |
∞ |
|
f (t) = |
+ å[ak cos(w1kt) + bk sin(w1kt)] |
||
|
|||
2 |
k=1 |
||
|
|
||
(где w1 - круговая частота первой гармоники) и проанализировать, как отрабатывает система основные гармоники. Тогда в качестве типового сигнала рассматривается гармоническое колебание. Такие сигналы широко применяются при частотных методах исследования САУ.
Однако синусоидальные воздействия различных частот можно подавать не на все объекты. Иногда удобно использовать колебания "прямоугольной формы" (включено - выключено), "треугольной формы" (равномерное открытие и закрытие регулирующего элемента).
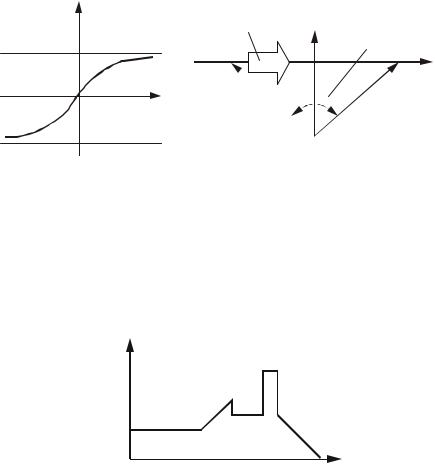
Существуют и другие типовые сигналы для систем определенных классов, например, при исследовании систем сопровождения объекта в качестве типового воздействия используют функцию арктангенса (рис.1.13,а):
æ |
v |
ö |
|
ç |
÷ |
||
|
|||
z(t) = arctgç |
p |
t ÷ |
|
è |
ø , |
где v - скорость сопровождаемого объекта; p - курсовой параметр (перпендикуляр на траекторию движения). В случае прямолинейного равномерного
движения объекта (рис.1.13,б) представляет закон изменения угла между направлением на объект и некоторым фиксированным направлением (например, на север).
17
z(t) |
Объект |
Север |
|
||
π/2 |
|
z(t) |
|
|
|
0 |
t |
|
− π/2 |
|
РЛС |
а |
|
б |
Рис.1.13. Типовой сигнал для систем сопровождения объекта
В отдельных случаях типовые воздействия могут иметь сложную форму, которая определяется экспериментальным путем. Иногда заказчик САУ требует проверки ее работы на специальный заданный входной сигнал, например, представленный на рис.1.14.
z(t)
1 |
|
0 |
t |
|
Рис.1.14. Сложное управляющее
воздействие
1.5. Линеаризация динамических систем. Уравнения динамики и статики САУ. Пример линеаризации
системы управления
Для анализа САУ необходимо располагать ее математическим описанием (моделью), например, дифференциальным или интегродифференциальным уравнением.
Существует два подхода к решению задачи математического моделирования динамических систем: теоретический и эмпирический. В первом случае математическая модель строится на основании общих законов той дисциплины, с которой связана природа изучаемой задачи. Например, в механике это могут быть законы Ньютона, в теории электрических цепей - законы Кирхгофа и т.д. Во втором случае неизвестны законы, позволяющие составить дифференциальные уравнения. Поэтому принимаются различные предположения (гипотезы) относительно протекающих процессов при малых изменениях параметров - переменных, а дифференциальные уравнения получаются путем предельного перехода. При этом
согласование результатов исследования полученного дифференциального уравнения с экспериментальными данными означает, что принятая гипотеза правильно отражает истинное положение вещей. В рассматриваемом случае необязательно знать природу процессов, протекающих в системе; достаточно иметь сведения об их внешних проявлениях.
18
Обычно САУ представляются нелинейными дифференциальными уравнениями. Причинами нелинейностей являются насыщения, зазоры, ограничения и т.д. Анализ нелинейных систем, как правило, достаточно сложен. Теория нелинейных дифференциальных уравнений, по существу, отсутствует. В аналитической форме
можно решать только нелинейные дифференциальные уравнения частных видов невысокого порядка. Напротив, теория линейных дифференциальных уравнений разработана в самом общем виде для уравнений любого порядка. Поэтому для решения математических вопросов, возникающих в приложениях, обращаются в первую очередь к линейным методам. При этом даже нелинейные системы стремятся приближенно рассматривать как линейные.
Существует достаточно большой класс нелинейных систем, которые можно при определенных условиях линеаризовать, т.е. сделать линейными в математическом смысле.
Необходимыми условиями для проведения линеаризации обычно являются:
∙отсутствие разрывных неоднозначных или резко изменяющихся характеристик;
∙справедливость установленного дифференциального (алгебраического) уравнения, связывающего входные и выходные величины в течение всего времени управления.
Таким образом, сложную задачу интегрирования нелинейных уравнений можно свести к более простой задаче - решению линейных дифференциальных уравнений. В настоящее время известны различные методы линеаризации нелинейных систем, т.е.
приближенного представления нелинейных систем практически равноценными линейными.
Широкое распространение получил метод Ляпунова, или метод малых отклонений. Согласно этому методу нелинейная функция раскладывается в ряд Тейлора в окрестности рабочей точки, соответствующей установившемуся процессу, и отбрасываются члены ряда, порядок которых выше первого.
Например, если нелинейная зависимость y(t) = F[x(t)] непрерывна и
дифференцируема в некоторой окрестности точки установившегося процесса линеаризация этой зависимости может осуществляться путем ее разложения в ряд Тейлора в этой точке с учетом лишь линейного члена разложения:
|
|
y(t) = y0 |
+ dy |
|
0 [x(t) − x0 |
] |
|
|
|
||||||
dy |
|
|
dx |
|
dy |
|
, |
|
|
|
|
|
|
||
где y0 = F[x0 ]; dx |
|
0 - значение производной dx |
в точке x0 . |
||||
|
|||||||
Чтобы пояснить методику линеаризации реальной физической системы, рассмотрим практический пример. Необходимо получить модель (дифференциальное уравнение) электродвигателя постоянного тока и провести линеаризацию полученной зависимости.
В соответствии со вторым законом Ньютона для вращательного движения уравнение моментов на валу двигателя имеет вид:
j |
dω |
|
= M д − Mc |
|
|
|
dt |
, |
(1.1) |
||||
|
|
|||||
где j - момент инерции подвижной части двигателя - якоря; ω - угловая
скорость якоря двигателя; Mд - движущий (крутящий) момент якоря двигателя; Mc - момент сопротивления или момент нагрузки на валу двигателя.
Из курса электротехники для двигателя постоянного тока известно, что
Mc = Mc (ω) - нелинейная функция одной переменной ω ; Mд = M д (ω,l) - нелинейная
19
функция двух переменных: ω и l , где l - управляющее воздействие. Управляющим |
|||||||
воздействием для двигателя является изменение напряжения в цепи якоря или в цепи |
|||||||
обмотки возбуждения. Причем первый вариант имеет большее распространение |
|||||||
из-за лучших статических и динамических характеристик по сравнению со вторым. |
|||||||
|
Обычно нелинейные зависимости Mc = Mc (w) и Mд = Mд (w,l) задаются |
||||||
аналитически или в виде графиков, они определяются типом двигателя, характером |
|||||||
нагрузки и т.д. |
|
|
|
|
|
|
|
|
Установившийся режим работы двигателя (его рабочая точка) характеризуется |
||||||
двумя постоянными величинами: номинальным управляющим воздействием lо и |
|||||||
установившейся угловой скоростью wо , соответствующей заданному значению lо . |
|||||||
|
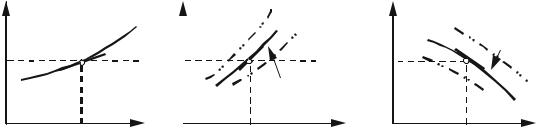
Для наглядного отображения функциональной зависимости Mд = Mд (w,l) |
||||||
требуется два графика: первый график отображает зависимость Mд = Mд (l) |
при |
||||||
различных фиксированных значениях wi , |
i = 1 ... n, а второй - Mд = Mд (w) |
при |
|||||
различных фиксированных значениях li , i = 1 ... m. |
|
|
|
||||
Mc |
|
Mд |
ωi |
= const |
Mд |
li = const |
|
Mcо |
O |
Mдо |
O |
|
Mдо |
Olо |
= const |
|
|
|
|||||
|
|
|
|
ωо = const |
|
|
|
0 |
ωо |
ω 0 |
lо |
l |
0 |
ωо |
ω |
|
|
Рис.1.15. Типичные нелинейные механические характеристики |
|||||
|
|
|
двигателя постоянного тока |
|
|
||
Нелинейные зависимости Mc = Mc (w) |
и Mд = Mд (w,l) |
представлены на рис.1.15. |
|||||||||||||||||||||||||||||||||||||||
Для линеаризации воспользуемся первым методом малых отклонений Ляпунова. |
|||||||||||||||||||||||||||||||||||||||||
В основу метода положено разложение нелинейных функций Mc |
и Mд в ряд Тейлора в |
||||||||||||||||||||||||||||||||||||||||
окрестностях рабочей точки О с координатами wо |
и lо (см. рис.1.15). |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
¶M |
|
ö |
|
|
|
|
1 |
æ |
¶2M |
ö |
|
|
|
|
|
|||||||||
|
|
|
|
|
M |
c |
|
о |
= M |
cо |
+ ç |
|
c |
÷ Dw + |
|
|
× ç |
|
|
|
|
c |
÷ |
Dw2 |
+ |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
è |
¶w ø0 |
|
|
|
2! |
ç |
¶w |
2 |
÷ |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
¶3M |
|
|
|
è |
|
|
ø0 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
1 |
|
|
æ |
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
+ |
|
|
|
|
|
× |
ç |
|
|
3 |
c ÷ |
3 |
+ ..., |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
3! |
ç |
|
|
÷ |
Dw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
è |
¶w |
ø0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где Mco - момент нагрузки на валу двигателя на частоте wо . |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
æ ¶M |
ö |
|
|
|
|
1 |
|
|
æ |
¶2M |
ö |
|
|
|
|
|
|
|
|
|
|
|
||||||
M |
д |
|
о |
= M |
до |
+ |
ç |
|
|
д |
÷ |
Dw + |
× |
ç |
|
|
|
д |
÷ |
Dw2 + |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
ç |
|
|
÷ |
|
|
|
|
|
|
|
ç |
|
|
2 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
æ |
¶3M |
|
|
ö |
è ¶w ø0 |
|
|
2! |
|
è |
¶w |
|
ø0 |
æ ¶2M |
ö |
|
|
||||||||||||||||||||
|
1 |
|
|
д |
|
|
|
|
|
æ |
¶M |
д |
ö |
|
|
|
|
|
1 |
|
|
||||||||||||||||||||
+ |
|
× ç |
|
|
|
|
|
÷ |
Dw3 + ... + ç |
|
|
|
|
÷ |
× Dl + |
× ç |
|
|
|
|
д |
÷ |
|
× Dl2 + ..., |
|||||||||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||||||||||||||||||||||
|
3! |
|
ç |
¶w |
|
÷ |
|
|
|
|
|
ç |
|
|
¶l |
|
÷ |
|
|
|
|
|
2! |
ç |
|
¶l |
÷ |
|
|
||||||||||||
|
|
è |
|
|
|
|
|
ø |
0 |
|
|
|
|
è |
|
|
|
ø0 |
|
|
|
|
è |
|
|
ø |
0 |
(1.3) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
20