Материал: бархоткин системы автоматического управления
|
jV(ω) |
|
|
|
|
||
|
II |
I |
|
ϕ(ω) = π + arctg[V(ω)/U(ω)] |
ϕ(ω) = arctg[V(ω)/U(ω)] |
||
|
|
|
|
0 |
U(ω) |
||
ϕ(ω) = −π + arctg[V(ω)/U(ω)] |
ϕ(ω) = arctg[V(ω)/U(ω)] |
||
|
III |
IV |
|
Рис.1.18. К определению ФЧХ в зависимости от номера
квадранта
Функция ϕ(ω) является нечетной, так как ϕ(ω) = −ϕ(−ω) .
На комплексной плоскости АФХ определяет вектор, модуль которого равен
аргумент ϕ(ω) - угол, образованный этим вектором с действительной положительной полуосью.
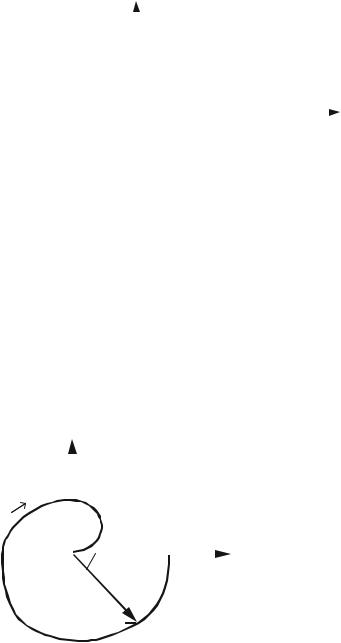
Кривая, которую прочерчивает конец вектора W ( jω) при изменении ω от 0 до +∞ (иногда от –∞ до +∞), называется годографом, или АФХ системы (рис.1.19).
jV(ω)
|
ω |
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ui |
ω = 0 |
||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
W(jω) |
Vi |
|
|
ϕ(ω) |
|
|
U(ω) |
|||||
|
|
|
|
|||||||||
|
|
|
|
|||||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
W(jωi) |
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
Рис.1.19. Годограф динамической системы
Ранее было показано, что вещественная частотная характеристика является четной функцией, а мнимая частотная характеристика - нечетной функцией частоты. В
силу этого годограф, построенный для положительных значений ω , является зеркальным
отображением годографа, построенного для отрицательных значений ω .
Таким образом, ЛДС могут представлять пять частотных характеристик, между которыми существуют следующие очевидные зависимости:
1) АФХ или КЧХ
W ( jω) = H (ω)e jϕ(ω)
= U (ω) + jV (ω) ;
2) вещественная частотная характеристика
U (ω) = H (ω)cosϕ(ω) ; 3) мнимая частотная характеристика
26

|
4) |
АЧХ |
|
|
|
V (ω) = H (ω)sin ϕ(ω) ; |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
H (ω) = |
|
W ( jω) |
|
= U 2 (ω) +V |
2 (ω) |
; |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
5) |
ФЧХ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
ϕ(ω) = argW ( jω) = arg V (ω) |
при U (ω) > 0 . |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U (ω) |
|
|
|
|
||||||||||
|
Частотные свойства ЛДС будут полностью определены, если известна функция |
|||||||||||||||||||||||||||
W ( jω) или соответствующие пары характеристик: U (ω) , V (ω) |
|
или H (ω) , |
ϕ(ω) . |
|||||||||||||||||||||||||
|
Наиболее часто используются АФХ, а также АЧХ и ФЧХ, так как эти |
|||||||||||||||||||||||||||
характеристики имеют ярковыраженный физический смысл. |
|
|
|
|
|
|
||||||||||||||||||||||
|
Еще раз подчеркнем, что введенные частотные характеристики относятся к |
|||||||||||||||||||||||||||
стационарной ЛДС и не зависят от времени. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Зная, что W = W ( jω) = H (ω)e jϕ(ω) , определим реакцию ЛДС на сигнал |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z (t) = |
Z |
e jωt |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
z(t) = Z cosωt . Ранее было показано, что z(t) = z1(t) + z2 (t) , причем 1 |
2 |
|
и |
|||||||||||||||||||||||||
z2 (t) = |
Z |
e |
− jωt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
. Вычислим соответствующие составляющие выходного сигнала x1(t) и |
|||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||
x2 (t) линейной динамической системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
x (t) = z (t)W = |
Z |
e jωt H (ω)e jϕ(ω) |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
1 |
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
; |
|
|
|
|
|
||||||
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|||||||
|
|
|
x2 (t) = z2 (t)W = |
|
e |
− jωt |
H (−ω)e |
jϕ(−ω) |
= |
e |
− jωt |
H (ω)e |
− jϕ(ω) |
|
||||||||||||||
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
здесь учитывается, что H (−ω) = H (ω) , ϕ(−ω) = −ϕ(ω) . |
|
|
|
|
|
|
|
||||||||||||||||||||
|
Применив принцип суперпозиции, получим общий (суммарный) выходной |
|||||||||||||||||||||||||||
сигнал линейной динамической системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
x(t) = x (t) + x |
2 |
(t) = ZH (ω) e jωt e jϕ(ω) + e− jωt e− jϕ(ω) |
= |
|
|
|
|||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
= ZH (ω) e j[ωt +ϕ(ω)] + e− j[ωt +ϕ(ω)] = ZH (ω) cos[ωt + ϕ(t)]. 2
Можно сделать следующий вывод: если на вход ЛДС подать гармонический сигнал определенной частоты и определенной амплитуды, то на выходе также получим
гармонический сигнал той же частоты, но его амплитуда изменится в H (ω) раз и выходной сигнал сдвинется по фазе на угол ϕ(ω) .
Графики входного z(t) и выходного x(t) сигналов представлены на рис.1.20.
27

H(ω) |
zH(ω) |
x(t) |
|
|
z(t) |
|
z |
0 |
t |
|
ϕ(ω) |
Рис.1.20. Изменение амплитуды и фазы выходного сигнала |
|
относительно входного сигнала при прохождении через |
|
линейную динамическую систему |
|
1.7. Экспериментальное определение частотных характеристик линейной динамической системы
Амплитудная и фазовая частотные характеристики ЛДС могут быть построены на основании экспериментальных данных. Если система устойчивая, то переходные процессы с течением времени затухают. Поэтому возможна постановка эксперимента
по определению амплитуды и фазы колебаний в установившемся режиме на выходе системы в зависимости от частоты входных сигналов.
Для этого на вход исследуемой системы подают гармонический сигнал с постоянной амплитудой, фиксированными фазой и частотой, которую при проведении эксперимента можно изменять:
zi (t) = Asin[ωit + ϕ] , i =1, 2, ... n.
Использование входных сигналов одной амплитуды снижает трудоемкость эксперимента и облегчает интерпретацию полученных результатов. Для упрощения
последующего изложения примем фазу ϕ входных колебаний равной нулю.
При постоянной амплитуде и нулевой фазе входных сигналов амплитуда и фаза установившихся колебаний на выходе линейной системы зависят только от частоты входных колебаний:
xi (t) = Ai (ωi )sin[ωit + ϕi (ωi )] , i =1, 2, ... n.
Будем последовательно увеличивать частоту входного сигнала ωi , начиная с нуля. Для каждого значения входной частоты ωi можно наблюдать амплитуду Ai и фазовый сдвиг ϕi выходного сигнала.
|
H (ω ) = |
Ai |
|
|
|
||
Найдем отношение амплитуд выходного и входного сигналов |
i |
A , а |
|
|
|||
также сдвиг фазы выходного сигнала ϕi относительно входного в зависимости от частоты ωi , i =1,2,...n.
Ai
Результаты расчетов A и ϕi для каждой фиксированной частоты ωi представим в виде табл.1.1.
Таблица 1.1
Обработанные результаты эксперимента
28
A = const |
|
ω1 |
ω2 |
… |
ωn |
||
Ai |
|
|
|
A1 |
A2 |
… |
An |
H (ω |
) = |
Ai |
|
H |
H |
… |
H |
|
|||||||
i |
|
A |
|
1 |
2 |
|
n |
|
|
|
|
|
|
|
|
ϕ(ωi) |
|
|
|
ϕ1 |
ϕ2 |
… |
ϕn |
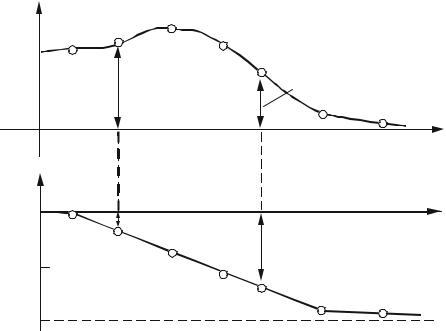
Табличные данные изобразим в виде графиков. Отношение амплитуды
выходного сигнала к амплитуде входного и сдвиг фаз между ними в зависимости от частоты представляют собой соответственно АЧХ и ФЧХ системы.
Сначала по данным, зафиксированным в таблице, нанесем отдельные точки графиков. Затем точки соединим ломаными линиями. После чего осуществим аппроксимацию этих линий плавными кривыми. Для этого используем один из известных методов сглаживания, например метод наименьших квадратов, сплайны и т.д. Полученные графики АЧХ и ФЧХ могут иметь вид, представленный на рис.1.21.
H(ω) |
|
|
|
H(ω ) |
H(ω2) |
|
1 |
|
|
|
ω |
ϕ(ω), град |
|
|
0 |
ϕ(ω1) |
ω |
|
||
|
|
ϕ(ω2) |
−90 |
|
|
−180 |
|
|
Рис.1.21. Графическое представление результатов эксперимента |
||
График АФХ (годограф) можно строить двумя способами (в прямоугольной или полярной системе координат), используя для этого соответственно пары частотных
характеристик: H (ω) , ϕ(ω) либо U (ω) , V (ω) . В нашем случае удобнее воспользоваться
H (ω) , ϕ(ω) . График АФХ системы показан на рис.1.22, причем угол показан отрицательным, так как в реальных системах вынужденные колебания имеют отставание по фазе относительно задающих воздействий.
1.8. Передаточная функция линейной динамической системы и ее свойства
Поведение линейной динамической системы можно описать следующим дифференциальным уравнением:
29
an x |
(n) |
(t) + an−1x |
(n−1) |
(t) + ...+ a2 x(t) + a1x(t) + ao x(t) = |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
&& |
|
& |
|
|
|
|
= bm z |
(m) |
(t) + bm−1z |
(m−1) |
|
|
|
|
|
t |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
(t) + ...+ b2 z(t) + b1z(t) + bo z(t). |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
Найдем преобразование Лапласа для обеих частей уравнения при нулевых |
||||||||||||||||||||||||||||
начальных условиях: |
|
|
|
|
sn + a |
|
|
|
s(n−1) |
|
|
|
|
|
|
|
|
|
]X (s) = |
|
|
|||||||
|
[a |
n |
n−1 |
+ ...+ a |
2 |
s2 + a s + a |
o |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||
|
=[b sm + b |
|
−1 |
s(m−1) |
+ ... + b s2 |
+ b s + b ]Z(s), |
|
|
||||||||||||||||||||
|
|
|
|
|
|
m |
|
|
m |
|
|
|
|
|
|
|
2 |
|
1 |
|
o |
|
|
|||||
где X (s) - преобразование Лапласа выходного сигнала системы; Z(s) - |
||||||||||||||||||||||||||||
преобразование Лапласа входного сигнала. |
|
|
s(m−1) + ...+ b s2 + b s + b |
|||||||||||||||||||||||||
|
|
|
|
|
|
X (s) |
|
b |
|
sm |
+ b |
|
||||||||||||||||
W (s) = |
|
|
|
= |
|
|
m |
|
|
|
|
|
m−1 |
|
|
|
|
2 |
1 |
o |
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
Z(s) |
|
|
ansn + an−1s(n−1) + ... + a2s2 + a1s + ao |
|||||||||||||||||||
Определение. Передаточной функцией ЛДС называется отношение |
||||||||||||||||||||||||||||
преобразования Лапласа выходной величины системы к преобразованию Лапласа |
||||||||||||||||||||||||||||
входной величины при нулевых начальных условиях. |
|
|
|
|
|
|
||||||||||||||||||||||
Следует отметить, что при ненулевых начальных условиях передаточная |
||||||||||||||||||||||||||||
функция не является исчерпывающей характеристикой ЛДС. В этом случае по ней
нельзя восстановить дифференциальное уравнение системы и получить описание протекающих в ней процессов при произвольных начальных значениях.
Рассмотрим основные свойства передаточной функции ЛДС.
1. Передаточная функция ЛДС представляет собой дробно-рацио-нальную функцию, причем в реальной системе порядок числителя не превышает порядок знаменателя, т.е. m ≤ n . Это условие называется условием физической реализуемости системы. Оно означает, что нельзя создать систему, передаточная функция которой не удовлетворяла бы этому условию. Таким образом, степень полинома знаменателя передаточной функции определяет порядок системы.
2.В реальной ЛДС коэффициенты передаточной функции ai и bi отражают свойства ее параметров и поэтому являются вещественными величинами.
3.Корни полинома числителя передаточной функции называются нулями, а корни полинома знаменателя - полюсами. Если передаточная функция имеет комплексные нули или полюсы, то они являются комплексно-сопряженными.
Действительно, так как коэффициенты ai и bi передаточной функции вещественные числа, то невещественные нули и полюсы могут быть только комплексно- сопряженными величинами.
4. При анализе динамических систем нули и полюсы (их называют особенностями передаточной функции) удобно изображать точками на комплексной плоскости s (рис.1.23).
Если полюсы передаточной функции расположены в левой части комплексной плоскости (как показано на рис.1.23), то это свидетельствует об устойчивости системы.
Если передаточная функция системы не содержит особенностей (нулей и полюсов) в правой части комплексной плоскости, то систему называют минимально-
фазовой, в противном случае ее считают неминимально-фазовой.
Рассмотрим связь передаточной функции линейной динамической системы с ее АФХ. Для формального перехода от передаточной функции W (s) к АФХ производят замену s на jω , соответствующая замена справедлива и для обратного перехода.
|
X ( jω) |
|
b |
( jω)m + b |
( jω)(m−1) + ... + b ( jω)2 |
+ b ( jω) + b |
|||
W ( jω) = |
|
= |
m |
m−1 |
2 |
1 |
o |
|
|
Z( jω) |
an ( jω)n + an−1( jω)(n−1) + ... + a2 ( jω)2 + a1( jω) + ao , |
||||||||
|
|
||||||||
причем m ≤ n .
30