Материал: бархоткин системы автоматического управления
выходе. При изменении нагрузки (возмущающего воздействия) чувствительное устройство вырабатывает сигнал в виде напряжения постоянного тока. Это напряжение пропорционально току генератора, который в свою очередь зависит от нагрузки.
Выработанный сигнал поступает в цепь возбуждения генератора и изменяет величину тока (управляющее воздействие) в ней таким образом, чтобы возвратить напряжение генератора (выходную величину) к исходному значению.
Неполное знание свойств объекта управления, изменение его параметров вследствие старения элементов и действия неконтролируемых возмущений, а также ряд других факторов затрудняют реализацию систем управления на базе этого принципа.
В разомкнутых системах управляющее воздействие на объект управления
задается без учета действительного положения управляемой величины x(t) , а только на основании цели управления, характеристик объекта и известных априори либо измеряемых в процессе управления внешних воздействий. Поэтому такое управление является жестким.
Систему управления можно построить таким образом, чтобы точность
выполнения алгоритма функционирования обеспечивалась и без измерения возмущений.
Принцип обратной связи (управления по отклонению) заключается в сравнении действительного значения управляемой величины с требуемым (предписанным) ее значением и в управлении объектом в зависимости от результатов этого сравнения.
Применение этого принципа приводит к построению автоматических систем с замкнутой цепью воздействий, или систем с отрицательной обратной связью (рис.1.3).
g(t) ε(t) |
Устройство |
u(t) |
Объект |
x(t) |
|||
|
|
|
|
||||
|
|
|
|
управления |
|
управления |
|
- |
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Рис.1.3. Система, реализующая принцип обратной связи
В замкнутой системе управляющие воздействия формируются на основе информации о состоянии объекта, в частности, по отклонению управляемой x(t) величины от заданной g(t) величины. Таким образом, отклонение (рассогласование)
ε(t) = g(t) − x(t) используется для формирования воздействия на объект, которое продолжается до тех пор, пока это рассогласование не станет достаточно малым.
Следовательно, обратная связь, по которой поступает в устройство управления текущая информация о состоянии объекта управления или его выходных переменных, - это средство управления при неполной информации, обеспечивающее системе свойство адаптивности (приспособляемости) к изменениям внутренних и внешних условий ее работы.
Принцип обратной связи используется в электронных стабилизаторах напряжений, системах регулирования скорости вращения двигателей, системах автоматической подстройки частоты генератора, системах автоматического измерения угловых координат и т.д.
Достоинства принципа управления по отклонению:
∙высокая точность управления и более низкая требовательность к точности изготовления элементов системы (по сравнению с принципом управления по возмущению);
∙успешное достижение цели управления при действии многочисленных возмущающих факторов (в том числе и неконтролируемых).
11
Однако быстродействие замкнутых систем сравнительно низкое, поскольку они реагируют не на причину, а на следствие (т.е. на отклонение управляемой величины от заданного значения), а следовательно, имеют некоторое запаздывание и определенное допустимое отклонение управляемой величины. Автоматические системы, построенные на основе принципа замкнутого управления, получили название систем автоматического регулирования (САР).
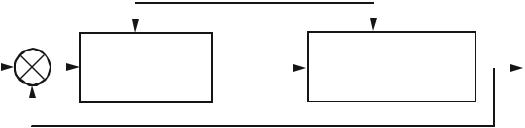
Современные автоматические системы высокой точности обычно строятся на основе принципа комбинированного управления, сочетающего достоинства принципа управления по отклонению и принципа управления по возмущению. При этом в комбинированной системе (рис.1.4) наряду с замкнутым контуром, образуемым отрицательной обратной связью, имеется цепь компенсации возмущающего воздействия, поддающегося измерению.
g(t) ε(t) |
|
|
u(t) |
|
f(t) |
x(t) |
||||
|
|
|
||||||||
|
|
|
|
|||||||
Устройство |
Объект |
|||||||||
|
|
|
|
|||||||
|
|
|
|
управления |
|
управления |
|
|||
- |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Рис.1.4. Система, действующая на основе принципа комбинированного управления
1.3. Классификация математических моделей динамических систем
При анализе и синтезе систем управления возникает необходимость выбора с определенной степенью приближения адекватных математических моделей, которые позволяли бы определить изменение во времени переменных состояния системы.
Остановимся на их классификации по различным признакам.
Методы ТАУ разработаны применительно к различным типовым математическим моделям реальных систем. Математическая модель - это формальное описание системы с помощью математических средств: дифференциальных, интегральных, разностных, алгебраических уравнений и т.д.
По характеру входящих в САУ звеньев системы делятся на линейные и нелинейные. В линейных системах между выходной и входной величинами существует линейная функциональная зависимость в статических и динамических режимах работы.
Процессы, происходящие в этих системах, описываются линейными операторными уравнениями (например, линейными дифференциальными уравнениями). Одно из основных свойств всякой линейной системы заключается в том, что если на нее одновременно воздействуют несколько возмущений, то их совместный эффект равен сумме эффектов, вызываемых каждым из возмущений в отдельности. Данный принцип сложения отдельных эффектов называется принципом суперпозиции. Системы, для которых не выполняется принцип суперпозиции, относятся к нелинейным.
Линейные и нелинейные системы подразделяются на следующие три класса: непрерывные, дискретные и дискретно-непрерывные системы. Непрерывные системы описываются дифференциальными уравнениями, дискретные - дифференциально- разностными уравнениями, а дискретно-непрерывные - обоими видами уравнений.
12
Как линейные, так и нелинейные динамические системы могут быть стационарными или нестационарными. Стационарные системы представляются уравнениями, коэффициенты которых не зависят от времени. Это означает, что свойства системы со временем не изменяются. В нестационарных системах хотя бы один параметр зависит от времени.
В свою очередь стационарные и нестационарные системы подразделяются на системы с сосредоточенными и распределенными параметрами. В системах с сосредоточенными параметрами каждый параметр сосредоточен в одной точке.
Поэтому динамику системы можно описать с помощью дифференциального уравнения в полных производных, т.е. переменные величины будут зависеть только от времени. В
системах с распределенными параметрами хотя бы один параметр распределен в пространстве
(по одной или нескольким пространственным координатам), т.е. изменяется не только во времени, но и в пространстве.
Кроме того, системы каждого из класса или подкласса могут быть подразделены на детерминированные и стохастические. Систему называют детерминированной, если
приложенные к ней воздействия и параметры модели являются постоянными или детерминированными функциями переменных состояния и времени. Система является стохастической, если приложенные к ней воздействия и параметры модели являются случайными функциями или случайными величинами.
Реальные системы могут входить сразу в несколько классов. Приведем примеры моделей систем.
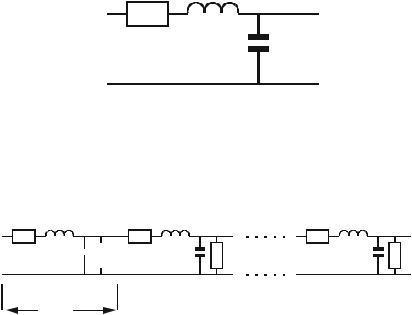
Пример 1. Колебательный контур (рис.1.5) может рассматриваться как линейная
непрерывная стационарная детерминированная система с сосредоточенными параметрами:
Uвх |
(t) = L di(t) |
+ |
|
1 t |
i(t)dt + i(t)R. |
|
|
|
|
||||
|
C ò |
|||||
|
dt |
|
|
|
||
|
R |
|
0 |
|
||
|
|
L |
|
|||
Uвх |
|
|
|
C |
Uвых |
|
Рис.1.5. Колебательный контур
Пример 2. Канал передачи данных между двумя территориально удаленными ЭВМ представляет длинную линию, которая является линейной непрерывной стационарной детерминированной системой с распределенными параметрами (рис.1.6).
R L
C 
 G
G
x
Рис.1.6. Длинная линия - пара длинных проводов
В однородной длинной линии ее параметры распределены вдоль нее
равномерно. Разделим длинную линию на малые отрезки длиной x , в пределах которых параметры можно считать сосредоточенными в одной точке. Пусть погонные сопротивление, индуктивность, емкость и проводимость имеют значения R, L, C, G (см.
13
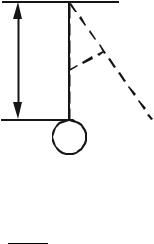
рис.1.6). В каждом сечении линии напряжение u = u(t, x) и ток i = i(t, x) являются
функциями времени t и координаты x (удаления конкретного элемента x от ее начала):
∂u(t, x)
∂x
∂i(t, x)
∂x
= −i(t, x)R − L ∂i(t, x) ;
∂t
= −Gu(t, x) − C ∂u(t, x) .
∂t
Пример 3. Математический маятник (рис.1.7) является нелинейной непрерывной стационарной детерминированной системой с сосредоточенными параметрами.
На рис.1.7 обозначены: mм, lм - масса и длина подвеса маятника; θ(t) - угол отклонения маятника в момент времени t.
lм
θ(t)
mм
Рис.1.7. Математический маятник
Уравнение движения маятника имеет вид:
lм d 2θ(t) + g sin θ(t) = 0, dt2
где g - ускорение свободного падения.
Данное уравнение является нелинейным, так как выходная величина θ(t) находится под знаком синуса. Его решение представляет большие трудности. Однако если предположить, что координата θ в процессе движения мало отклоняется от нуля, то приближенно можно заменить sinθ(t) на θ(t). Получим линейное уравнение маятника:
lм |
d 2θ(t) |
+ gθ(t) = 0 |
|
dt2 |
|||
|
. |
Механический маятник при малых колебаниях представляет линейную систему. Следует отметить, что почти все САУ являются нелинейными системами,
содержащими как переменные, так и распределенные параметры, причем значения переменных в данный момент могут зависеть не только от текущих, но и от предыдущих значений этих переменных. Однако при выполнении определенных
условий многие нелинейные модели можно в первом приближении рассматривать как линейные.
1.4. Типовые входные воздействия, их представление во временной и комплексной областях, практическое применение
В процессе функционирования на САУ оказывают влияние задающее и возмущающее воздействия. Чтобы охарактеризовать динамические свойства системы, необходимо знать ее реакцию на приложенные воздействия. Во многих случаях
внешние воздействия изменяются во времени по сложным и часто заранее неизвестным законам. Определение реакции системы на такие воздействия представляет сложную
14
задачу. Поэтому первоначально при анализе динамических свойств САУ исследуют типовые воздействия.
Вкачестве типовых воздействий выбираются такие, реакции на которые достаточно полно характеризуют динамические свойства исследуемой системы. Типовые воздействия должны быть близкими к реальным, при этом реакция на них должна определяться достаточно просто. Рассмотрим типовые входные воздействия более подробно.
Вкачестве типового воздействия при анализе динамики САУ часто выбирают единичный скачок по амплитуде (координате). Этому воздействию соответствует единичная ступенчатая функция, которая представляет собой мгновенное изменение воздействия от нуля до постоянной величины, равной единице:
1(t) = 1 при t ³ 0; 1(t) = 0 при t < 0.
Z(s) = L[1(t)]= |
1 |
|
|||
s . |
|||||
Изображение по Лапласу этого сигнала имеет вид: |
|
||||
Z(s) = |
G |
|
|||
s . |
|||||
Если скачок не единичный, а его амплитуда равна G , то |
|||||
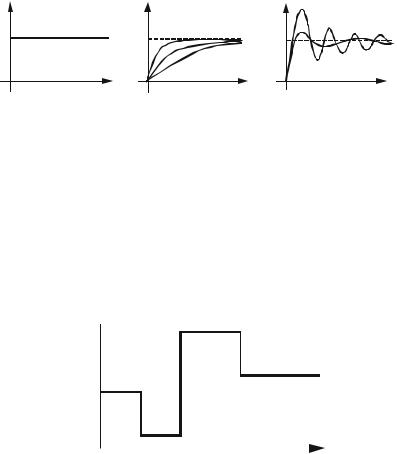
На рис.1.8 представлены графики входного воздействия типа "скачок по положению" и варианты выходных сигналов для различных систем. В данном случае x(t) является реакцией на "скачок по положению". В силу большой значимости этой функции она получила специальное название "переходная функция" и обозначение
z(t) |
|
h(t) |
|
0 |
t |
0 |
t |
а |
|
|
б |
h(t) |
|
0 |
t |
|
в |
Рис.1.8. Реакция системы на единичную ступенчатую |
|
функцию: а - реакция входного воздействия типа "скачок по |
|
положению"; б и в - переходные функции соответственно |
|
апериодических и колебательных звеньев |
. |
|
Определение. Переходная функция h(t) - это реакция системы на единичную ступенчатую функцию при нулевых начальных условиях.
Если система хорошо отрабатывает единичные ступенчатые воздействия, то она будет хорошо отрабатывать и более сложные сигналы, составленные из ступенчатых воздействий (рис.1.9).
z(t) 
0 |
|
|
t |
||
Рис.1.9. Сигнал, составленный
из ступенчатых воздействий
15