Материал: бархоткин системы автоматического управления
Возникает необходимость преобразования его из одной формы представления в другую и усиления его как по величине, так и по мощности.
Преобразующее устройство служит для преобразования одной физической величины в другую, более удобную для использования в процессе управления, но без выполнения функций измерения, усиления или коррекции. К преобразующим устройствам относятся датчики "угол - код", реле и др.
Корректирующие устройства предназначены для обеспечения заданных динамических свойств и повышения устойчивости замкнутой системы. С их помощью, например, обеспечивается высокая точность работы в установившемся режиме, демпфируются колебания для сильно колебательных объектов (таких как летательные аппараты, морские суда и т.д). Функции корректирующих устройств могут выполнять ЭВМ или аналоговые вычислительные устройства.
Усилительное устройство служит для усиления мощности сигналов. В хорошо
спроектированной системе отклонение регулируемой величины от заданного значения
ε(t) должно быть малым. Вместе с тем на объект управления должны поступать достаточно мощные воздействия. На практике широко используются электронные, магнитные, гидравлические, пневматические усилители.
Исполнительное устройство вырабатывает управляющее воздействие на орган управления объекта, например, руль летательного аппарата. В САУ в качестве исполнительных устройств используются следующие типы: пневматические, гидравлические и электрические.
Орган управления позволяет путем изменения его положения или состояния воздействовать на объект управления.
Для пояснения функций исполнительного устройства и органа управления приведем два примера.
Вавтопилоте рулевая машинка (исполнительное устройство) поворачивает на определенный угол рули (орган управления), что создает момент, вращающий летательный аппарат (объект управления) вокруг центра масс.
Всистеме регулирования уровня жидкости электродвигатель (исполнительное устройство) поднимает или опускает задвижку (орган управления) соответственно при недостатке или избытке жидкости.
Следует отметить, что орган управления иногда рассматривается как компонент объекта управления.
Объект управления - элемент, который подвергается управляющему воздействию. Как указывалось, объектом управления может быть мартеновская печь, ядерный реактор, космический аппарат и т.д.
Принципиальным отличием объекта управления от всех остальных элементов системы является то, что он обычно задан и при разработке САУ не может быть изменен, тогда как остальные элементы выбираются специально для решения конкретной задачи управления.
Всвязи с большим разнообразием объектов управления разными могут быть и управляемые переменные: напряжение, число оборотов, угловое положение, курс, мощность и т.д. Изучением конструкций объектов управления занимаются специальные дисциплины: электротехника, энергетика, аэродинамика и т.д.
Измерительный элемент предназначен для преобразования регулируемых величин или возмущающих воздействий в сигналы управления, удобные для дальнейшего использования. Чаще всего значения
регулируемых величин преобразуются в пропорциональные электрические сигналы или механические перемещения.
Элемент главной обратной связи - вырабатывающий сигнал, который находится
вопределенной функциональной зависимости от регулируемой переменной.
86
Конкретные схемы САУ могут отличаться от типовой схемы. Часть
рассмотренных устройств может отсутствовать или конструктивно объединяться в одном устройстве. Кроме того, САУ могут иметь другие элементы, не показанные на схеме (см. рис.3.6). Возможно наличие нескольких контуров местной обратной связи. Классификация САУ проводится по различным признакам. В частности, в зависимости от того, используется или нет информация об управляемой величине для выработки управляющих воздействий, различают два основных типа САУ - замкнутые
и разомкнутые (см. § 1.2).
Рассмотрим классификацию САУ по виду задающего сигнала. По этому признаку САУ подразделяются на системы стабилизации, программного управления и следящие.
Система стабилизации - система, управляющее (задающее) воздействие которой является постоянным ( g(t) = const ), а выходной параметр поддерживается на
определенном постоянном уровне ( x (t) = const ). Примеры систем стабилизации: автоматический стабилизатор напряжения, система поддержания постоянной температуры в холодильнике и т.д.
Система программного управления - система, задающий сигнал g(t) которой
изменяется по определенной программе. В данном случае g(t) = F(t) , где F(t) - функция, известная на всем интервале управления. Примерами систем программного
управления могут служить программа выхода на режим технологического процесса и программа разгона двигателя самолета.
Следящая система - это система, у которой изменение задающего сигнала
происходит по случайному закону ( g(t) = var ). Примерами следящих систем являются системы наведения ракет на цель по данным РЛС, системы управления автоматической стыковкой космических аппаратов.
3.3.Передаточная функция динамической системы
взамкнутом и разомкнутом состояниях
по различным видам воздействий
Типовое звено САУ характеризуется наличием одного входного и одного выходного сигналов. Поэтому его динамические свойства полностью определяются
одним дифференциальным уравнением или одной эквивалентной ему передаточной функцией. Однако при исследовании сложных САУ возникает необходимость выделения нескольких входных и выходных сигналов. Такими сигналами могут быть полезные и вредные входные воздействия, сигнал рассогласования, выходной сигнал и другие. Поэтому динамические свойства САУ описываются несколькими дифференциальными уравнениями или передаточными функциями, устанавливающими связь между выбранными сигналами.
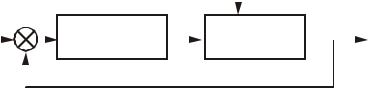
Рассмотрим обобщенную структурную схему САУ, включающую регулятор и объект управления (рис.3.7). ,
87
g(t) ε(t) |
|
z(t) |
|
f(t) |
x(t) |
||||||
|
|
||||||||||
|
|
|
|
|
|
Регулятор |
|
|
Объект |
|
|
|
− |
|
|
|
|
|
|
управления |
|
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Рис.3.7. Обобщенная структурная схема САУ: g(t) - задающее воздействие; ε(t) - сигнал ошибки (рассогласования); z(t) - управляющее воздействие; f(t) - возмущающее воздействие; x(t) - выходной сигнал
Для линейной динамической системы можно записать систему трех уравнений, представляющих следующие процессы:
1) формирование сигнала ошибки:
|
e(t) = g(t) - x(t); |
(3.6) |
|
2) |
функционирование регулятора: |
||
|
|||
|
R( p) × z(t) = L( p) × e(t); |
(3.7) |
|
3) |
функционирование объекта управления: |
||
|
|||
|
D( p) × x(t) = M ( p) × z(t) + N( p) × f (t), |
(3.8) |
|
|
|
где R( p), L ( p), D( p), M ( p), N ( p) - операторные полиномы, они определяются структурой исходных дифференциальных уравнений.
Для упрощения записи дифференциальных уравнений применяются символы дифференцирования:
p := |
d |
; pi := |
d i |
|
|
|||||||||||
|
dti . |
|
||||||||||||||
|
|
|
dt |
|
|
|
|
|||||||||
Возьмем преобразования Лапласа от правых и левых частей уравнений (3.6) - |
||||||||||||||||
(3.8) при нулевых начальных условиях: |
|
|
|
|
|
|
|
|
|
|||||||
E(s) = G(s) - X (s); |
(3.9) |
|||||||||||||||
R(s) × Z(s) = L(s) × E(s); |
||||||||||||||||
(3.10) |
||||||||||||||||
D(s) × X (s) = M (s) × Z(s) + N(s) × F(s). |
||||||||||||||||
(3.11) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Найдем передаточную функцию регулятора. Согласно рис.3.6 имеем: |
||||||||||||||||
W (s) = |
Z(s) |
. |
|
|||||||||||||
|
|
|
||||||||||||||
|
|
р |
|
|
E(s) |
|
||||||||||
Так как из уравнения (3.10) следует, что |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
Z(s) |
= |
|
L(s) |
|
|
|||||||||
|
|
E(s) R(s) , |
|
|||||||||||||
то выражение для Wр (s) можно представить в следующем виде: |
|
|||||||||||||||
Wр (s) = |
L(s) |
|
|
|
|
|
|
|
|
|
|
|||||
R(s) . |
|
|
|
|
|
|
|
|
(3.12) |
|||||||
|
|
|
|
|
|
|
|
|
||||||||
САУ имеет несколько входов, каждый из которых оказывает влияние на |
||||||||||||||||
выходной сигнал. Для определения передаточной функции по конкретному входу |
||||||||||||||||
необходимо сигналы, поступающие на другие входы, приравнять нулю. |
|
|||||||||||||||
Найдем передаточную функцию объекта управления. По определению (см. |
||||||||||||||||
рис.3.7) |
|
X (s) |
|
|
|
|||||||||||
W (s) = |
|
|
||||||||||||||
|
|
|||||||||||||||
|
|
o |
|
|
Z(s) . |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Примем, что возмущающее воздействие |
f (t) = 0 , тогда F (s) = 0 , и на основании |
|||||||||||||||
(3.11) найдем: |
|
|
|
|
|
|
|
|
|
|||||||
88

Wo (s) = .
(3.13)
В дальнейшем для упрощения промежуточных выкладок будем опускать в записи операторных полиномов обозначение переменной s , т.е. будем полагать, что
R= R( p), L = L ( p), D = D( p), M = M ( p), N = N ( p) .
Сучетом сделанного замечания систему из трех уравнений (3.9) - (3.11) можно
записать в виде
E = G - X ; |
(3.14) |
||||
R × Z = L × E; |
(3.15) |
||||
D × X = M × Z + N × F. |
(3.16) |
||||
Выразим изображение выходного сигнала X через изображения управляющего |
|||||
G и возмущающего F воздействий. |
|
|
|
||
На основании (3.16) имеем: |
|
|
|
||
X = M Z + |
N |
F |
|
||
|
(3.17) |
||||
D |
D . |
||||
Из (3.15) с учетом (3.14) получим: |
|
|
|
||
Z = |
L |
(G − X ) |
|
||
|
(3.18) |
||||
|
R |
. |
|||
Подставив (3.18) в (3.17), найдем:
|
|
X = |
M |
|
L |
G − |
M L |
X + |
N |
F |
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
D R |
|
|
||||||||||||||||||||
|
|
|
|
D R |
|
|
|
|
|
|
|
|
|
|
|
D . |
||||||||||
После несложных преобразований получим: |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
M L |
|
|
|
|
|
N |
|
|||||||||||||
|
|
X = |
|
|
D |
|
R |
|
G + |
|
|
D |
|
|
|
|
F |
|||||||||
|
|
|
|
|
|
|
|
|
M L |
|||||||||||||||||
|
|
|
1+ |
M |
|
L |
|
|
1+ |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Введем обозначения: |
|
|
D R |
|
|
|
D R . |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
M L |
|
|
|
|
|
N |
|
|
|
|
|||||||
|
|
|
|
W = |
;Wf |
= |
|
. |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
D R |
|
|
|||||||||||||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
W f |
|
|
|
|
|
|
|
|
|
|
|
|
|||
X = |
|
|
W |
|
G + |
|
|
|
|
F. |
|
|
|
|
|
|
|
|
||||||||
1 |
+ W |
|
1 + W |
|
|
|
|
|
|
|
(3.19) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Отметив важность последней формулы, представим ее в развернутом виде:
X (s) = |
|
|
W (s) |
G(s) + |
W f (s) |
F(s) |
|
1 |
+ W (s) |
1+ W (s) |
|
||||
|
|
. |
(3.20) |
||||
|
|
|
|
|
|
||
Таким образом, выходной сигнал САУ при поступлении нескольких воздействий определяется на основании принципа суперпозиции, в нашем случае первое слагаемое характеризует эффект управляющего воздействия, второе - возмущающего. Применив соотношение (3.20), найдем передаточные функции замкнутой системы отдельно по управляющему и возмущающему воздействиям.
Передаточная функция замкнутой системы по управляющему воздействию
Ф(s) = X (s)
G(s)
получается из (3.20) в предположении, что возмущающее воздействие отсутствует ( F (s) = 0 ):
Ф(s) = |
X (s) |
= |
|
W (s) |
|
|
|
G(s) |
1+ W (s) . |
(3.21) |
|||||
|
|
||||||
|
|
|
89 |
|
|
||

Аналогично определим передаточную функцию замкнутой системы по возмущающему воздействию:
Ф f (s) = |
X (s) |
|
|
F(s) . |
|||
|
|||
Вэтом случае G(s) = 0 , и на основании (3.20)
=W f (s)
Фf (s) 1 + W (s)
. |
(3.22) |
Подставив (3.21) и (3.22) в (3.20), получим формулу для вычисления
изображения выходного сигнала через изображения управляющего и возмущающего воздействий и соответствующие передаточные функции:
X (s) = Ф(s)G(s) + Ф f (s)F(s) . |
|
|
|
(3.23) |
||||||||||
Часто на практике рассматривают не реакцию системы, а величину ошибки, с |
||||||||||||||
которой система отрабатывает соответствующее входное воздействие. |
|
|||||||||||||
Из (3.14) с учетом (3.19) получим: |
|
|
|
|
|
|
|
|
|
|||||
E = G − X = G − ( |
|
W |
G + |
Wf |
F) = |
|
|
1 |
|
G − |
Wf |
F. |
|
|
1 |
+W |
1+ W |
1 |
+ W |
1+ W |
(3.24) |
||||||||
|
|
|
|
|
||||||||||
Найдем передаточную функцию замкнутой системы по ошибке от управляющего воздействия (см. рис.3.7):
= E(s)
Фε (s) G(s) .
Предположив, что возмущающее воздействие отсутствует ( F (s) = 0 ), из (3.24) получим:
|
|
|
|
E |
|
= |
|
|
|
1 |
|
|
|
|
|
|
G |
1+ W . |
|||||||
|
|
|
|
|
||||||||
Следовательно, в развернутой записи: |
|
|
|
|
|
|
||||||
Фε (s) = |
|
|
1 |
|
|
|
|
|
|
|
||
1 |
+ W (s) . |
(3.25) |
||||||||||
|
||||||||||||
Аналогично определим передаточную функцию замкнутой системы по ошибке от возмущающего воздействия (см. рис.3.7):
Фε f (s) = |
E(s) |
|
|
|
|||||||
F(s) . |
|
||||||||||
При G(s) = 0 из (3.24) имеем: |
|
|
|
|
|
|
|||||
|
|
|
W f (s) |
|
|
||||||
|
E |
= − |
|
||||||||
|
F |
1 + W (s) . |
|
||||||||
|
|
|
|||||||||
Таким образом, |
|
W f (s) |
|
|
|||||||
Фε f (s) = − |
|
|
|||||||||
1 |
+ W (s) . |
(3.26) |
|||||||||
|
|
||||||||||
Применив зависимости, полученные для замкнутой системы, установим соответствующие зависимости для разомкнутой системы. При размыкании обратной связи исчезает сигнал ошибки. Система уравнений (3.14) - (3.16) принимает вид:
E = G; |
(3.27) |
R × Z = L × E = L × G; |
(3.28) |
D × X = M × Z + N × F. |
(3.29) |
Выразим выходной сигнал разомкнутой САУ через изображения управляющего и возмущающего воздействий. Из уравнения (3.29)
найдем:
90