Материал: бархоткин системы автоматического управления
81
Глава 3. Структурные схемы и передаточные функции автоматических систем
3.1. Сложности реализации разомкнутых систем управления. Преимущество использования
замкнутых систем управления
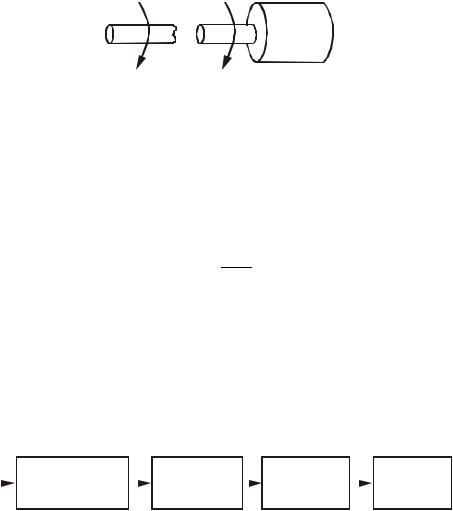
Разомкнутая система управления - это система, в которой управление осуществляется без обратной связи. Чтобы показать сложности реализации подобных систем, рассмотрим проблему передачи вращения от маломощного вала А на вал большой мощности B (рис.3.1).
Вал А |
Вал B |
Нагрузка |
θвх θвых
Рис.3.1. Постановка задачи: мощный вал должен
вращаться со скоростью маломощного вала
При этом необходимо добиться, чтобы угловая скорость вращения выходного
вала В
ΩВ = |
dθвых |
|
dt |
||
|
была равна угловой скорости вращения входного вала А
ΩA = dθвх dt ,
т.е. ΩA = ΩB ,
где θвх и θвых - соответственно угол поворота вала A и B.
Сразу отметим, что самое простое решение проблемы, заключающееся в механическом соединении валов, неприемлемо. Оно приведет к разрушению маломощного вала, который не может поворачивать мощный вал, связанный с массивной нагрузкой. Следует использовать источник внешней энергии (рис.3.2).
θвх |
Uтг |
Uy |
θвых |
|||||
|
Тахогенератор |
|
|
Усилитель |
|
Двигатель |
|
Нагрузка |
|
|
|
|
|||||
Рис.3.2. Структурная схема разомкнутой системы передачи
вращения вала
Чтобы ясней выразить суть решения проблемы рассмотрим ее упрощенно, не обращая внимания на динамику. Будем считать систему передачи вращения вала идеальной, т.е. полагать, что все ее устройства работают без запаздывания.
Дадим краткую характеристику используемых элементов. Тахогенератор измеряет скорость вращения вала А. Напряжение на его выходе:
82
Uтг = kтг × |
dqвх |
|
= kтг × WA |
|
|
dt |
|
, |
(3.1) |
||
|
|
|
|||
где kтг - коэффициент передачи тахогенератора. |
|
||||
Выходной сигнал усилителя |
|
|
|
|
|
Uy = ky |
×Uтг |
|
(3.2) |
||
|
|
|
|
|
|
( kу - коэффициент усиления) поступает на вход двигателя. Двигатель вращает вал B со скоростью
WB = |
dqвых |
= kдв ×Uy , |
|
dt |
|||
|
(3.3) |
где kдв - коэффициент пропорциональности.
Сучетом соотношений (3.1) - (3.3) получим выражение, связывающее входную
ивыходную угловые скорости:
ΩB = kдвU у = kдвkyUтг = kдвkykтгΩ A .
Равенство WA = WB , например, можно обеспечить, если
kдв = ky = kтг = 1.
Последнее условие выполнить сложно. Следует учитывать, что параметры элементов и устройств, входящих в систему, характеризуются определенным разбросом относительно их номинальных значений. Факторы внешней среды также не остаются постоянными. Поэтому при колебаниях температуры, давления, скорости ветра, механических вибрациях, пульсациях питающих напряжений каждый из параметров системы может изменяться в значительных пределах.
WA = |
1 |
|
|
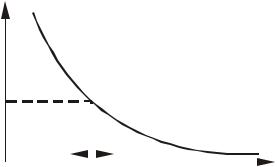
Введем обозначение kобщ = kдвkykтг и построим график зависимости WB |
kобщ |
(рис.3.3). |
|
ΩA/ΩB |
|
1
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
kобщ |
|||
Рис.3.3. Зависимость отношения ΩA /ΩB от kобщ
при разомкнутом контуре управления
Из рассмотрения графика можно сделать вывод о том, что при отклонении значения kобщ от 1 существенно изменяется точность отработки входного сигнала.
Поэтому необходимо иметь информацию об отклонении WB от WA и использовать ее для поддержания равенства угловых скоростей валов A и B.
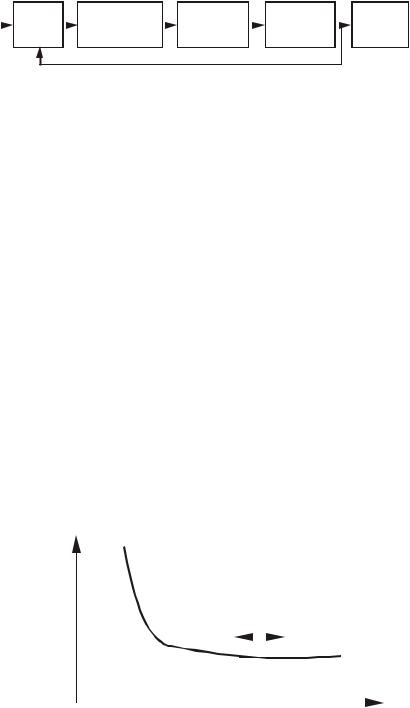
Структурная схема замкнутой системы передачи вращения маломощного вала на вал большой мощности показана на рис.3.4.
83
θвх |
|
Δθ |
Uтг |
Uy |
θвых |
|||||||
|
|
Датчик |
|
|
Тахогенератор |
|
Усилитель |
|
Двигатель |
|
|
Нагрузка |
|
|
|
|
|
|
|||||||
Рис.3.4. Структурная схема замкнутой системы передачи
вращения маломощного вала на вал большой мощности
Датчик рассогласования определяет сигнал ошибки:
|
|
Dq = qвх - qвых. |
(3.4) |
||||
Напряжение на выходе тахогенератора: |
|
|
|
||||
Uтг = kтг |
dDq |
= kтг ( |
dqвх |
- |
dqвых |
) = kтг (WA - WB ). |
|
dt |
dt |
dt |
|||||
|
|
|
|
||||
Приняв во внимание, что Uy = kyUтг и WB = kдв ×Uy , можно записать выражение для угловой скорости вала B:
WB = kдвkykтг (WA - WB ) = kобщ (WA - WB ).
Выясним степень влияния коэффициента передачи замкнутой системы kобщ на точность отработки входных сигналов.
W A
Из уравнения (3.5) найдем отношение WB . Для чего предварительно перепишем
уравнение в виде
WB (1+ kобщ ) = kобщWA ;
WA = 1+ |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kобщ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
WB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Построим график найденной зависимости (рис.3.5). |
|
|
|||||||||||||||||||||||||||||||||||
|
|
ΩA/ΩB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kобщ |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
1000 |
kобщ |
|||||||||||||||||||||||||||||||||
Рис.3.5. Зависимость отношения ΩA /ΩB от kобщ
при замкнутом контуре управления
Для хорошей работы системы коэффициент kобщ должен иметь достаточно
большое значение. Действительно, в этом случае изменение величины kобщ мало
WA
влияет на изменение отношения WB .
Чрезмерно увеличивать kобщ нельзя, так как возникает другая проблема - замкнутая система при больших коэффициентах передачи может стать неустойчивой.
84
Хотя сложности реализации разомкнутой системы и преимущество замкнутой системы управления показаны на примере передачи вращения маломощного вала на вал большой мощности, полученные выводы имеют общий характер и могут быть распространены на другие САУ.
3.2. Функциональная схема замкнутой САУ, назначение отдельных устройств и элементов. Классификация САУ
Независимо от назначения (управление мартеновской печью, ядерным реактором, установкой вакуумного напыления или наведением космического аппарата), а также независимо от физических принципов работы отдельных элементов, любая САУ может быть представлена функциональной схемой, отражающей ее динамические свойства.
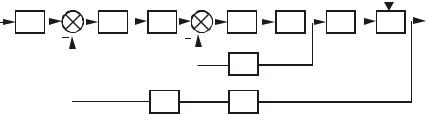
Рассмотрим обобщенную функциональную схему САУ (рис.3.6).
g(t) |
2 |
|
|
|
|
5 |
|
|
|
|
|
|
n(t) |
|
x(t) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
1 |
|
|
|
3 |
|
4 |
|
6 |
|
7 |
|
8 |
|
|
9 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
12 |
11 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Рис.3.6. Функциональная схема САУ: 1 - задающее устройство; 2 и 5 - устройства сравнения; 3 - преобразующее устройство; 4 и 10 - корректирующие устройства (регуляторы); 6 - усилительное устройство; 7 - исполнительное устройство; 8 - орган управления; 9 - объект управления; 11 - измерительный элемент (датчик); 12 - элемент
главной обратной связи
Задающее устройство преобразует входное воздействие в управляющий сигнал
, который определяет закон изменения выходной (регулируемой) величины . Исторически первыми задающими устройствами были пружины (часовой механизм), уровни (поплавковый регулятор уровня жидкости), калиброванные сопротивления и т.п. В современных САУ выработка заданной функции управления может
осуществляться специализированными вычислительными устройствами и
универсальными ЭВМ, что позволяет изменять значение регулируемой величины x(t) по сложному закону.
Устройства сравнения - это преобразователи с двумя входами, они предназначены для определения рассогласований, т.е. отклонения регулируемой величины от заданного значения, соответственно в контурах основной и местной обратной связи. Устройства сравнения также называют датчиками ошибки (отклонения).
Вряде систем устройство сравнения может представлять собой арифметическое устройство, которое осуществляет вычитание из измеренного датчиком значения регулируемой величины другой величины, принятой за опорную.
Вбольшинстве случаев непосредственное использование выходного сигнала устройства сравнения для приведения в действие органа управления невозможно.
85