Материал: бархоткин системы автоматического управления
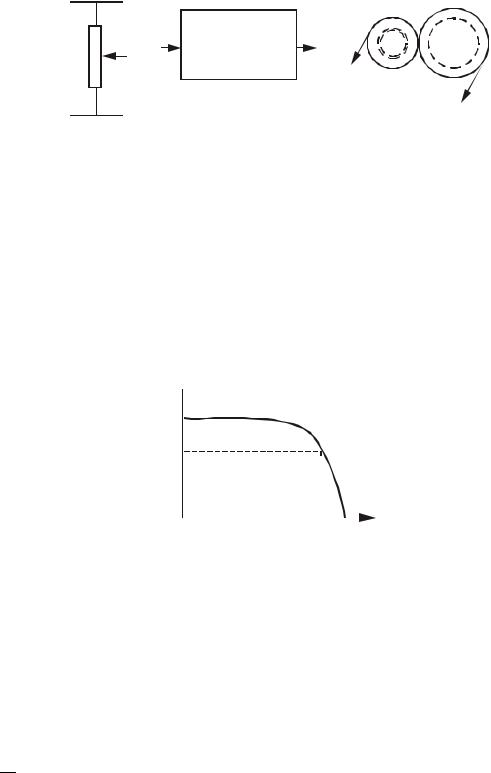
Uвх Электронный Uвых
усилитель
Uвх
η1
Uвых
|
η2 |
|
Для потенциометра и электронного |
Для редуктора η1= kη2, |
|
где η1, η2 - угловая ско- |
||
усилителя Uвых= kUвх |
||
рость входного и выход- |
||
|
ного вала соответственно |
Рис.2.32. Примеры реализации безынерционных звеньев
К безынерционному звену сводятся все звенья первого порядка, если можно пренебречь инерционностью, т.е. принять T = 0. Это звено является идеализацией реальных звеньев, так как в действительности ни одно звено не в состоянии равномерно пропускать все частоты от 0 до ∞.
Реальные устройства характеризуются определенной полосой пропускания, в пределах которой они могут рассматриваться как безынерционные, например, АЧХ реального электронного усилителя показана на рис.2.33.
H(ω) 
1
0,707
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωп |
ω |
||
Рис.2.33. График АЧХ реального
электронного усилителя
2.6. Интегрирующее звено
Интегрирующим называется звено, выходная величина которого пропорциональна интегралу от входного воздействия. Дифференциальное
уравнение интегрирующего звена имеет вид:
a1x&(t) = b0 z(t); x&(t) = kz(t) ,
где k = b0 - коэффициент передачи звена. a1
В стандартной форме уравнение интегрирующего звена записывается следующим образом:
t
x(t) = kò z(t)dt.
0
Определим передаточную функцию интегрирующего звена:
56
sX (s) = kZ(s); X (s) = k Z(ss) ;
W (s) = X (s) = k . Z(s) s
Запишем выражение для АФХ:
H'(t) = kv
H
v
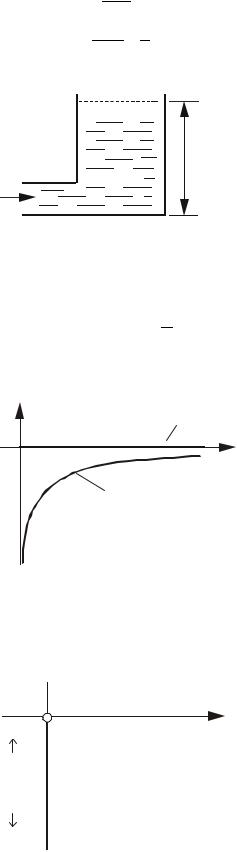
Рис.2.39. Резервуар - пример реализации
интегрирующего звена в гидродинамике
W ( jω) = |
X ( jω) |
= |
k |
|
= − j |
k |
. |
Z( jω) |
jω |
|
|||||
|
|
|
ω |
||||
Вещественная и мнимая части U (ω) = 0, V (ω) = − ωk , их графики показаны на рис.2.34.
U(ω), V(ω) |
|
U(ω) |
|
0 |
ω |
V(ω) |
|
Рис.2.34. Графики функций U(ω) и V(ω) |
|
интегрирующего звена |
|
Годограф интегрирующего звена расположен на отрицательной части мнимой оси
(рис.2.35),
V(ω)
8 |
0 |
ω |
|
ω |
|
0 |
|
U(ω)
Рис.2.35. Годограф
интегрирующего звена
57
причем
lim W ( jω) = 0 ; |
lim W ( jω) = −∞. |
ω→∞ |
ω→0 |
Частотные характеристики интегрирующего звена:
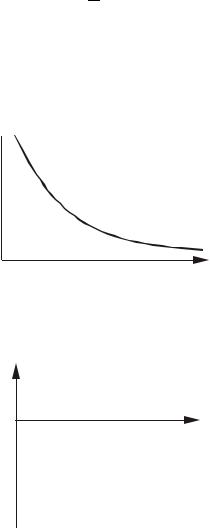
H (ω) = ωk ;
ϕ(ω) = arctg V (ω) = arctg(−∞), ϕ(ω) = −90o. U (ω)
АЧХ с ростом частоты убывает. Фаза выходного сигнала отстает от фазы входного сигнала на всех частотах на величину 90° (рис.2.36 и 2.37).
H(ω)
0 |
ω |
Рис.2.36. График АЧХ
интегрирующего звена
ϕ(ω)
0
ω
−π/2 
Рис.2.37. График ФЧХ
интегрирующего звена
ЛАЧХ интегрирующего звена имеет вид
Lm (ω) = 20lg k − 20lgω
и представлена на рис.2.38. Характерные точки: при ω =1 Lm (1) = 20lgk , при ω = k Lm (k) = 0 .
58
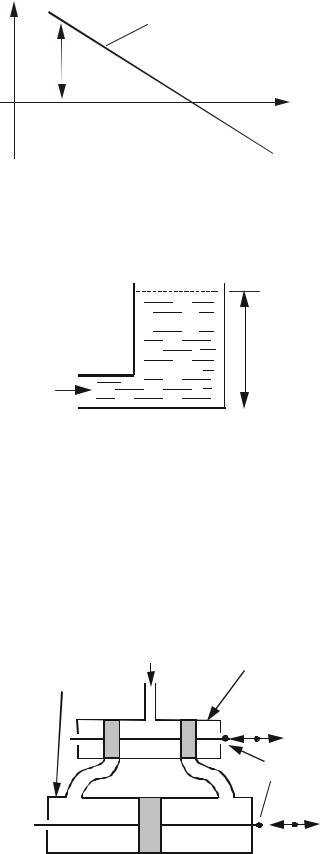
Lm(ω), дБ |
−20 дБ/дек |
|
|
|
|
20 lgk |
|
|
|
|
lg ω |
1 |
k |
ω, Гц |
Рис.2.38. График ЛАЧХ интегрирующего звена |
||
График ЛФЧХ аналогичен ФЧХ (см. рис.2.37). Приведем примеры реализации интегрирующих звеньев.
Пример 1. В резервуар поступает поток жидкости со скоростью v (рис.2.39).
H'(t) = kv
H
v
Рис.2.39. Резервуар - пример
реализации интегрирующего звена в гидродинамике
Выходной величиной H является уровень жидкости в резервуаре. Скорость
H ′(t) изменения уровня H (выходного сигнала) пропорциональна величине входного
сигнала, т.е. v.
Пример 2. Интегрирующим звеном является устройство "золотник-гидроцилиндр" (гидравлический интегратор), приведенное на рис.2.40. Это устройство входит в состав автопилота, служащего для поддержания заданного режима полета летательного аппарата.
|
р = const |
Управляющий |
|
Исполнительный |
цилиндр |
||
|
|||
Масло |
|||
цилиндр |
|||
z(t)
Поршни
x(t)
Рис.2.40. Гидравлический интегратор - пример
реализации интегрирующего звена
59

Входной величиной является смещение z(t) поршня гидравлического клапана (золотника) относительно нейтрального положения, а выходной - смещение x(t) поршня исполнительного цилиндра.
Сигнал z(t) вызывает смещение поршня гидравлического клапана и, следовательно, возникает перепад давления масла в левой и правой частях гидроцилиндра и соответственно движение поршня x(t) .
Так как p = const , то скорость перемещения поршня гидравлического цилиндра
t
пропорциональна степени открытия клапанов, т.е. x&(t) = kz(t) или x(t) = kòz(t)dt .
0
2.7. Идеальное дифференцирующее звено
Выходной сигнал дифференцирующего звена пропорционален производной от входного сигнала. Дифференциальное уравнение дифференцирующего звена:
a0 x(t) = b1z&(t) ; x(t) = kz&(t) ,
где k = b1  a0 .
a0 .
Возьмем преобразование Лапласа от обеих частей дифференциального уравнения при нулевых начальных условиях и определим передаточную функцию:
X (s) = ksZ(s) ;
W (s) = X (s) = ks . Z(s)
Заменив в передаточной функции s на jω , получим АФХ:
W ( jω) = kjω ;
U (ω) = 0 ;
V (ω) = jkω .
Найдем частотные характеристики дифференцирующего звена:
H (ω) = kω ;
ϕ(ω) = argtg V (ω) = arctg(+∞) = +π/ 2 . U (ω)
Графики соответствующих функций показаны на рис.2.41 и 2.42.
U(ω), V(ω)
V(ω)
0 |
ω |
U(ω)
Рис.2.41. Вещественная и мнимая
части АФХ идеального дифференцирующего звена для ω
60