Материал: Teoria_Rysina_1-22
Билет 9
9 — Сложное движение точки. Ускорение Кориолиса.
9.1 — Сложное движение точки
Сложное движение точки — такое движение, при котором точка JM движется в некоторой системе координат JOx1y1z1, а сама система координат движется относительно другой условно неподвижной системы координат
Относительное движение – движение точки JM относительно подвижной системы координат
JOx1y1z1
Переносное движение – движение подвижной системы координат JOx1y1z1 относительно неподвижной JOxyz.
Абсолютное движение точки — движение точки JM относительно неподвижной системы координат JOxyz.
Вектор J задает положение точки относительно подвижной системы координат, вектор JM задает положение точки в неподвижной системе JOxyz.
dρ
Найдем производную Jdt . Разложим по ортам подвижных осей:
Jρ = x1 i 1 + y1 j 1 + z1 k 1. Учитывая, что орты подвижной системы являются функциями времени, получим
dρ |
d |
|
dx1 |
i 1 + |
dy1 |
dz1 |
d i 1 |
x1 + |
d j 1 |
y1 + |
d k 1 |
z1 |
||||
Jdt |
= dt (x1 i 1 + y1 j 1 + z1 k 1) = dt |
|
dt |
j 1 + dt k 1 + |
dt |
dt |
dt |
|||||||||
Первые три слагаемых представляют собой разложение некоторого вектора в |
|
|||||||||||||||
подвижных осях. Назовем этот вектор локальной производной вектора и |
|
|
||||||||||||||
|
d ρ |
dx1 |
dy1 |
|
dz1 |
k 1 |
|
|
|
|
|
|
|
|||
обозначим: Jdt = |
dt |
i 1 + dt j 1 |
+ |
|
dt |
|
. По формулам Пуассона: |
|
|
|
||||||
d i |
1 = [ω × i 1] ; |
d j |
1 = [ω × j |
1] |
|
|
d k |
= [ω × k 1]. В итоге получаем |
|
|||||||
J dt |
dt |
; |
|
|
dt1 |
|
||||||||||
|
dρ |
d ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
формулу Бура: Jdt |
= |
dt [ω × ρ ], где Jω — вектор угловой скорости системы |
|
|||||||||||||
координат JOx1y1z1 относительно неподвижной JOxyz.
9.2 — Ускорение Кориолиса
Теорема Кориолиса: «абсолютное ускорение точки в сложном движении определяется как геометрическая сумма относительного, переносного и кориолисова ускорений.» Доказательство:
1) Закон сложения скоростей: Jv = v относительная + v переносная.
Страница (1 из 2(
|
|
|
|
|
Билет 9 |
|
|
||
2) |
Дифференциация по времени: |
|
|
|
|
|
|||
|
d v |
= ( |
d v отн |
)за счет переносной |
+ ( |
d v отн |
)отн + |
||
|
Ja = dt |
dt |
dt |
||||||
3) |
Относительное ускорение: Ja r = ( |
d v отн |
)отн |
|
|||||
|
dt |
|
|||||||
4) |
Переносное ускорение: Ja e = |
d v пер |
|
|
|||||
dt |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
пер
d v пер
dt
+ |
d v пер |
|
dt |
||
|
отн пер
5) Ускорение Кориолиса: Ja К = ( |
d v отн |
)пер + |
d v пер |
dt |
dt |
||
|
|
|
отн |
6)Изменение скорости точки за счет переносного движения изменение вектора скорости происходит за счет поворота:
Jv = |
d r |
= |
|
ω × r |
|
d v отн |
= |
|
ω × v отн |
|
|
dt |
[ |
] |
( dt )пер |
[ |
] |
||||||
|
|
|
|
|
7)Изменение скорости точки за счет относительного движения точка переместилась из JA в JA за время J t: Jv пер′!= v пер + [ωпер × (v отн · ∆ t) ,
где J(v отн · ∆ t) — вектор перемещения из JA в JA .
Jv пер′!− v пер = [ωпер × (v отн · ∆ t) |
d v e |
)r |
= [ωe × v r] |
J ( dt |
8)Итоговое ускорение Кориолиса: Ja K = [2ωe × v r
9)Закон сложения скорсотей кориолиса: Ja = a r + a e + [2ωe × v r
Страница (2 из 2(
Билет 10
10 — Сферическое движение. Кинематические уравнения Эйлера.
10.1 — Сферическое движение
Сферическое движение — движение твердого тела с одной закрепленной точкой.
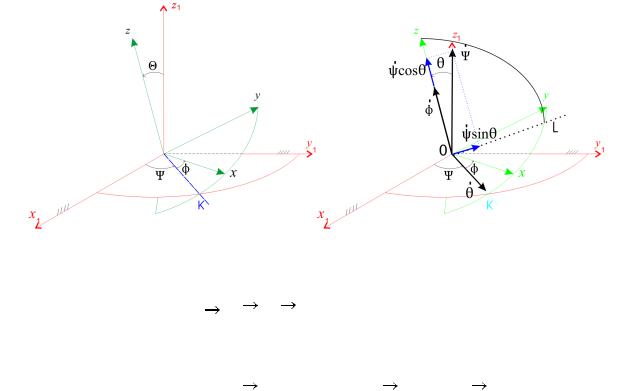
Рассмотрим движение по отношению к системе отсчета JOx1y1z1 твердого тела, закрепленного так, что одна его точка JO остается во все время движения неподвижной. Такое движение совершает, например, волчок, у которого неподвижна точка его опоры о плоскость, или любое другое тело, закрепленное
шаровым шарниром. Найдем, какими параметрами определяется положение тела, имеющего неподвижную точку. Для этого свяжем жестко с телом трехгранник JOxyz, по положению которого можно судить о положении тела. Линия JOK, вдоль которой пересекаются плоскости JOxy и JOx1y1, называется линией узлов. Тогда положение по отношению к осям JOx1y1z1 трехгранника JOxyz, а с ним и самого тела можно определить углами Эйлера:
Jφ = KOx ; ψ = x1OK ; θ = z1Oz
Эти углы, называемые углами Эйлера, имеют следующие, взятые из небесной механики наименования, J — угол собственного вращения, J — угол прецессии, Jθ — угол нутации. Положительные
направления отсчета углов показаны на левом рисунке стрелками. Чтобы знать движение тела, надо знать его положение по отношению к осям JOx1y1z1 в любой момент времени, т.е. знать зависимости: Jφ = ƒ1(t) ; ψ = ƒ2(t) ; θ = ƒ3(t) — Уравнения движения твердого тела вокруг неподвижной точки.
10.2 — Кинематические уравнения Эйлера
Найдем проекции угловой скорости на подвижные оси координат. примем (без
˙
доказательства), что Jω = ψ + θ + ϕ.
Выполним дополнительное построение. Проведем плоскость, проходящую через оси JOz и JOz1. Линию пересечения этой плоскости и подвижной плоскости
JxOy обозначим J0L. Разложим Jψ˙ на компоненты Jψ sin(φ) и Jψ cos(φ) (правый рисунок)
Страница (1 из 2(
Билет 10
Используя равенство углов со взаимно перпендикулярными сторонами J0L 0K , 0x 0y , заметим, что угол между J0y и J0L равен J . Отсюда,
раскладывая компоненту Jψ sin(φ)
ωx = ψ sin(φ)sin(θ) + θ˙cos(φ) ωy = ψ˙ cos(φ)sin(θ) − θ˙sin(φ)
ωz = ψ˙ cos(θ) + φ˙
по осям J0x и J0y, получим:
— Кинематические уравнения Эйлера для
определения проекции угловой скорости на оси координат при сферическом движении. Уравнения Эйлера на неподвижные оси координат:
ωx′!= φsin(ψ)sin(θ) + θ˙cos(ψ)
ωy′!= − φ˙ cos(ψ)sin(θ) + θ˙sin(ψ). Модуль угловой скорости:
ωz′!= φ˙ cos(θ) + ψ˙
Страница (2 из 2(
Билет 11
11 — Кинематика точки в полярных координатах (скорость и ускорение).
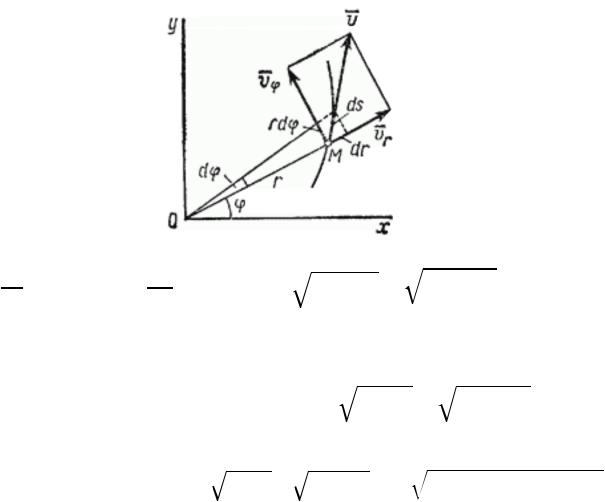
Положение точки можно определять полярными координатами J и J . Тогда закон движения точки в полярных координатах будет задаваться уравнениями:
Jr = ƒ1(t), φ = ƒ2(t).
dS
Скорость точки: Jdt , где JdS геометрически слагается из радиального
перемещения Jdr и поперечного перемещения Jr · dφ , которое перпендикулярно JOM. Следовательно сама скорость геометрически слагается из радиальной и поперечной скоростей:
Jvr = dr = r˙ , vφ = r · dφ = rφ˙ v = vr2 |
+ vφ2 = r˙2 |
+ r2φ˙2 |
||
dt |
dt |
|
|
|
|
x = r · cos(φ) |
|
|
|
Выразим декартовы координаты: J{y = r · sin(φ) |
и продифференцируем по |
|||
|
x˙ = r˙ · cos(φ) − rφ˙ sin(φ) |
|
|
|
времени: J{y˙ = r˙ · sin(φ) + rφ˙ cos(φ) v = |
x˙ |
2 + y˙2 = |
r˙2 + r2φ˙2. |
|
Найдя вторую производную координат по времени, выражаем ускорение:
x˙ = r˙ · cos(φ) − rφ˙ sin(φ) |
|
|
|
|
2 |
|
2 |
J{y˙ = r˙ · sin(φ) + rφ˙ cos(φ) |
v = |
x˙2 + y˙2 = r˙2 + r2φ˙2 |
a = (r˙2 |
− rφ˙2) |
|
+ (rφ¨ + 2˙rφ˙) |
|
, где первая скобка — радиальное ускорение, вторая — поперечное ускорение.
Страница (1 из 1(