Материал: Teoria_Rysina_1-22

Билет 15
материальным точкам движущейся механической системы, кроме фактически действующих на них активных сил и реакций связей, условно приложить также силы инерции точек, то получим уравновешенную систему сил, к которой можно применять все уравнения статики.»
Принцип Даламбера эквивалентен основному уравнению динамики и наоборот,
из основного уравнения динамики можно вывести принцип Даламбера. В |
|
отличии от ОУД, принцип выражает этот закон в форме уравнения статики |
|
(метод Кинетостатики), удобный при решении первой задачи динамики ( |
по |
заданному движению и известной массе материальной точки требуется определить силу, |
|
действующую на эту точку, или, если на материальную точку действует несколько сил, |
|
определить одну из них.) |
|
15.3 — Принцип возможных перемешений
Возможные перемещения — перемещение, согласованное со связями.
Связи — любого вида ограничения, накладываемые на положения, скорости точек механической системы, независящие от действующих сил. Независимые от времени связи — Стационарные. Всегда выражается функцией: 1) yJ = 0 — невысвобождающаяся (двухсторонняя) связь; 2) yJ > 0; y < 0 — односторонняя связь:
1)ƒJ (x, y, z — геометрические связи
2)ƒJ (x, y, z, … — кинематические связи
3)ƒJ (t — реономная связь
4)ƒJ (r , v ) — склерономная связь
5)Неголономные связи — не интегрируемая геометрическая связь. Идеальные связи — такие связи, работа реакций которых на любых возможных перемещений равна нулю
«Для равновесия механической системы с идеальными удерживающими связями, необходимо и достаточно, чтобы возможная работа активных сил была равна нулю: JδA = 0»
Принцип свободных перемещений позволяет решать самые разнообразные задачи на равновесие механических систем — находить неизвестные активные с и л ы, о п р е д е л я т ь р е а к ц и и с в я з е й, н а х о д и т ь п о л о ж е н и я равновесия механической системы под действием приложенной системы сил.
Страница (2 из 2(
Билет 16
16 — Определение реакций опор конструкции и усилий в стержнях фермы с помощью принципа возможных перемещений.
Принцип возможных перемещений является основным принципом аналитической механики. Он даёт самые общие методы решения задач статики и позволяет определять каждое неизвестное усилие независимо от остальных, составляя для него можно уравнения равновесия
Теорема Лагранжа-Остроградского:
«Для равновесия механической системы, подчиненной идеальным, геометрическим и стационарным связям, необходимо и достаточно, чтобы сумма работ активных сил, действующих на систему, была равна нулю на
любом возможном перемещении системы: J∑δAk(a) = 0»
k=1
Возможные перемещения механической системы — бесконечно малые перемещения системы допускаемые наложенными на нее связями Так как в дальнейшем рассматриваются только плоские системы, то
чтобы увидеть возможное перемещение системы, состоящей из плоских твёрдых тел, надо для каждого твёрдого тела увидеть или построить МЦС. Тогда возможным перемещением каждого твёрдого тела будет поворот вокруг своего МЦС, или тело будет двигаться поступательно, если МЦС отсутствует. Возможные перемещения системы определяются только связями, наложенными на систему, и не зависят от сил, действующих на систему. В случае геометрических и стационарных связей направления возможных перемещений точек системы совпадают с направлениями скоростей этих точек при реальном движении.
Число независимых возможных перемещений системы называется числом степеней свободы системы.
Применение принципа возможных перемещений для нахождения реакций связей в статистически определимых механических системах основано на частичной замене связей реакциями.
Смысл частичной замены связи реакцией состоит в том, чтобы полученная в результате такого действия система имела одну степень свободы.
План решения:
1)Перевести искомую реакцию в разряд активных, т.e. Заменить связь или часть связи искомой реакцией;
2)Выяснить, из каких твердых тел состоит система и пронумеровать их;
3)Придать системе возможное перемещение. Для этого найти возможные перемещения двух точек каждого тела — точек, небе наложены связи, или общих точек двух тел. Если возможные перемещения не параллельны между собой, то по ним строим МЦС. Тогда возможное перемещение тела
— поворот вокруг МЦС. Если же эти возможные перемещения параллельны и не перпендикулярны прямой, соединяющей точки, то возможное перемещения тела — поступательное.
Страница (1 из 2(
Билет 16 4) Записать принцип возможных перемещений, т.е. Составить уравнение:
J∑δAk(a) = 0; k=1
5) Выразить все возможные перемещения, входящие в уравнение, через одно независимое. Для этого нужно воспользоваться равенством возможных перемещений общих точек (точек соприкосновения) твердых тел;
6) Приравнять нулю коэффициент при независимом возможном перемещении и из полученного уравнения найти искомую реакцию.
Страница (2 из 2(
Билет 17
17 — Теория поля. Потенциал. Условие потенциальности. Потенциальная энергия. Свойство силовых линии и эквипотенциальных поверхностей.
17.1 -- Теория поля
Теория поля — физическая теория о взаимодействии материи и полей.
Поле — физический объект, описываемый векторным полем, подчиняющимся динамическим уравнениям.
JU(x, y, z) — потенциальная функция.
Если существует скорость J не существует поля.
|
17.2 — Потенциал |
|
||
E = T + П JT = mv2 |
= 1 μv2 П = |
J−U |
J 2 dU = U − U |
|
2 |
2 |
|
2 |
1 |
|
∫2 |
|
||
Функция П = −J U называется потенциальной энергией или потенциалом, она определена с точностью до аддитивной постоянной. Потенциальное поле называется нестационарным, в зависимости от того, завись потенциал явно от времени или нет.
JE — полная механическая энергия; TJ — кинетическая энергия; UJ (x, y, z) — потенциальная функция.
|
|
17.3 — Условие потенциальности |
||
J∂F = |
∂F ; ∂F = |
∂F ; ∂F |
= |
∂F ; Если силы удовлетворяют этому условию то |
∂y |
∂x ∂z |
∂x ∂y |
|
∂z |
они потенциальны.
17.4 — Потенциальная энергия
Потенциальной энергией (запасом работы) материальной точки в данном положении M называется скалярная величина П, равная той работе, которую проведут силы поля при перемещении точки из положения M в нулевое.
JA = Π(MO)
Элементарная работа сил: JδA = F · r = F · r · cos(α)
|
2 |
|
2 |
|
|
|
|
2 |
|
2 |
|
|
∫1 |
|
∫1 |
|
|
|
∫1 |
|
|
∫1 |
|
AJ 1,2 = |
Fd r = |
Fxdx + Fydy + Fzdz = |
|
|
|
dU = |
|
||||
|
N |
|
N |
m |
∂ r v |
|
m |
|
|
N |
|
JδA = ∑ Fv · δ r v = ∑ Fv ∑ |
∂qj |
δqj = ∑ |
∑Fv · |
||||||||
|
v=1 |
|
v=1 |
j=1 |
j=1 |
|
(v=1 |
|
|||
|
N |
∂rv |
|
|
|
|
|
|
|
|
|
JQj = ∑ Fv · |
, j = 1, m |
|
|
|
|
|
|
|
|||
∂qj |
|
|
|
|
|
|
|
||||
v=1 |
|
|
|
|
|
|
|
|
|
|
|
∂∂Ux dx + ∂∂Uy dy + ∂∂Uz dz
∂r v )δqj
∂qj
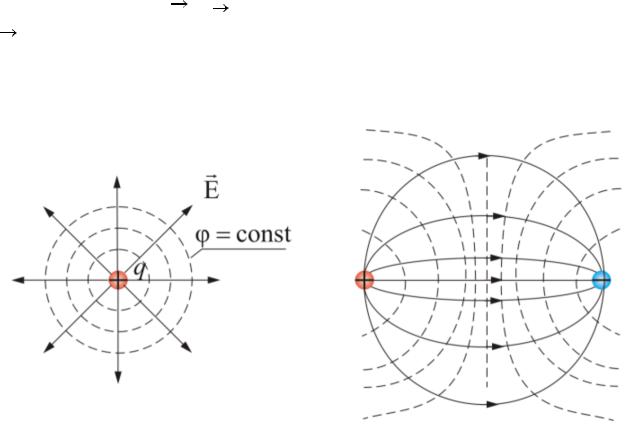
17.5 — Свойство силовых линий и эквипотенциальных полей
Эквипотенциальное поле — поверхность, на которой внутренняя энергия не изменяется. JU = const
Страница (1 из 2(
Билет 17
Силовая линия — кривая, касательная к которой совпадает с направлением вектора силы. Силовые линии перпендикулярны эквипотенциальным
поверхностям: δJA = Fτ · δ r , у силы есть только нормальный компонент |
J |
FJ τ = 0
Величина силы в силовом поле обратно пропорциональна расстоянию между эквипотенциальными поверхностями.
Страница (2 из 2(