Материал: Teoria_Rysina_1-22
Билет 12
12 — Динамика точки. Способы интегрирования.
12.1 — Динамика точка
Динамика – раздел механики, в котором изучается движение материальных тел под действием сил.
Материальная точка – тело конечной массы, размерами и различием в движении отдельных точек которого по условиям задачи можно пренебречь.
Законы динамики:
1)Закон инерации: «Изолированная от внешних воздействий материальная точка находится в состоянии покоя или равномерного и прямолинейного движения.»
2)Основной закон динамики: «Сила, действующая на материальную точку, сообщает ей ускорение, которое в инерциальной системе отсчета пропорционально величине силы и имеет направление силы Pm a = F »
3)Закон равенства действия и противодействия: «Две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противоположные стороны.»
Задачи динамики:
1)Первая задача динамики: «Зная закон движения точки, определить действующую на нее силу»
2)Вторая (Основная) задача динамики: «зная действующие на точку силы,
определить закон движения точки»
Способы интегрирования В общем случае вторая задача динамики приводит к необходимости решения
m x¨ = Fx(x,
системы трех дифференциальных уравнений: my¨ = Fy(x, mz¨ = Fz(x,
y, z, x˙, y˙, z˙, t) y, z, x˙, y˙, z˙, t), y, z, x˙, y˙, z˙, t)
x = x(t, C1, …, C6)
имеющее общее решение: y = y(t, C1, …, C6). Для определения постоянных z = z(t, C1, …, C6)
интегрированияJC1, …, C6 необходимо задать начальные условия при движения:
|
x = x0x˙ = x˙0 |
|
Jt0 = 0 |
y = y |
y y |
0 |
˙ = ˙0 . |
|
|
z = z0 z˙ = z˙0 |
|
Страница (1 из 2(
Билет 12
12.2 — Способы интегрирования:
Рассмотрим движение по прямой
1) |
JF = const |
|
|
Jm x¨ = F |
|
|
Jm x˙ = ∫ Fdt + C1 = Ft + C1 |
|
|
Jm x = ∫ (Ft)dt + ∫ C1dt = |
1 |
|
2 Ft2 + C1t + C2 |
|
Начальные условия: |
Определеяем константы: |
|
Jt0 = 0 |
Jm x0 = C2 |
|
xJ (t0) = x0 |
Jmv0 = C1 |
|
Jv(t0) = v0 |
|
|
2) |
JF = ƒ(t) |
|
|
Jm x¨ = F |
|
|
Jm x˙ = ∫ F(t)dt + C1 = φ(t) + C1 |
|
|
Jm x = ∫ φ(t)dt + C1t + C2 |
|
3) |
JF = ƒ(v(t) |
|
|
Jm dv = F(v) |
|
|
dt |
|
Разделяя переменные:
Jm Fd(vv) = dt m∫ Fd(vv) = t + C1 mφ(t) = t + C1
4) JF = ƒ(v(x)
Проведем замену:
Ja = dv · dx = v dv mv dv = F(v) m v |
dv = x + C ψ (v) = x + C |
||||||
dt dx |
dx |
dx |
|
∫ |
F(v) |
1 |
1 |
|
|
|
|||||
5) JF = ƒ(x) |
|
|
|
|
|
|
|
Jmv dv |
= F(x) |
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
Jm∫ vdv = ∫ F(x)dx + C1 |
2 |
|
|
|
|
||
∫ |
|
|
|
|
|
|
|
J F(x)dx = A |
— Работа силы J 1 mv2 = A + C1 |
|
|
||||
Страница (2 из 2(
Билет 13
13 — Три теоремы динамики точки. Кинетическая энергия в 3х случаях движения тела. Моменты инерции. Центробежный момент инерции. Осевой момент инерции. Тензор инерции.
13.1 — Три теоремы динамики точки
1) Теорема об изменении количества движения точки
JQ = m v — количество движения точка (импульс).
JT = |
1 mv2 |
— кинетическая энергия точки. |
|
2 |
|
JdS = F · dt — элементарный импульс силы. |
||
|
4 |
|
JS = |
∫0 |
|
Fdt — импульс силы за конечный промежуток времени J1 |
||
«Изменение количества движения точки за некоторый промежуток времени равно геометрической сумме импульсов всех действующих на точку сил за тот же промежуток времени.»
Jm |
d v |
= ∑ Fk — основной закон движения в форме |
m ddvt2x = ∑k |
Fkx |
. |
|
dt |
dx |
= vx |
|
|||
|
k |
dt |
|
|
||
Так как масса Jm = const, то ее можно внести под знак дифференциала и это
d(m v ) |
= ∑ Fk Производная от количества |
уравнение переписать как: J dt |
|
|
k |
движения по времени равна геометрической сумме действующих на точку сил. Если точка массы J движется под действием силы JR = ∑k Fk, и в момент
времени Jt0 = 0 имеет скорость J0, а в момент времени J1 - скорость Jv 1, то:
Jd(m v ) = ∑ Fkdt и интегрируя получаем: Jm v 1 − m v 0 = ∑ S k, что и |
|
k |
k |
требовалось доказать
2) Теорема об изменении кинетической энергии точки
JdA = Fτds — Элементарная работа, где JFτ — проекция силы на касательную к траектории, Jds — бесконечно малое перемещение вдоль
касательной |
JFτ = F · cos(α) |
dA = Fcos(α)ds. Тогда работа силы при |
||
|
|
|
|
2 |
|
|
|
AJ 1→2 = |
∫1 |
перемещении из точки 1 в точку 2: |
Fτds. |
|||
JW = A |
= dA = Fτ |
ds = Fτ · v — мощность. |
||
t |
dt |
dt |
|
|
1 |
|
|
|
|
«Изменение кинетической энергии точки при перемещении равно алгебраической сумме работ сил на том же перемещении.»
Страница (1 из 5(
Билет 13
Пусть точка с массой J в начальный момент времени Jt0 |
= 0 находится в |
|
||||||
положении J и имеет скорость J0, а в момент времени J1 |
в положении 2 и имеет |
|||||||
скорость J1. |
|
|
|
|
|
|
|
|
Выберем систему координат MJ τn и спроектируем основное уравнение на |
|
|||||||
касательную: Jmvτ = |
∑ |
Fkτ. Так как Jwτ = dv |
= dv ds |
= v dv |
|
|
|
|
|
dt |
ds dt |
|
dt |
|
|
|
|
|
k |
k |
|
|
|
(2 |
) |
|
Разделяя переменные получаем: Jmvdv = ∑Fkτds mvdv = d |
1 mv2 |
|
, |
|||||
получая в итоге дифференциальную форму теоремы об изменении кинетической энергии. Проинтегрировав, получим полную форму теоремы:
1 |
|
1 |
= ∑ A1→2, что и требовалось доказать |
J2 mv22 |
− |
2 mv12 |
3) Теорема моментов для точки
«Производная по времени от момента количества движения точки относительно какой-либо оси равна моменту действующей силы относительно той же оси.»
Теорема моментов имеет более полное наименование как теорема об изменении момента количества движения материальной точки. Данная теорема возникла из очень простых и логичных соображений.
Количество движения JQ = m v является векторной величиной. Следовательно, как и всякий вектор, может иметь момент относительно какого-либо центра или
оси. Обозначается как Jm0(m v ) или Jmz(m v ) и называется моментом количества движения точки или кинетическим моментом. По модулю он равен:
J m0(m v ) = mvh, где Jh — длина перпендикуляра, опущенного из центра JO на
= mvh, где Jh — длина перпендикуляра, опущенного из центра JO на
линию действия вектора Jm v
Рассмотрим теорему моментов относительно оси JOz. Пусть материальная точка массы J движется по траектории под действием силы JF, со скоростью Jv . К точке приложены два вектора JF и Jm v , каждый из которых создает свой момент. Для вектора JF запишем: Jmz(F ) = xFy − yFx , аналогично для вектора Jm v : Jmz(m v ) = xmvy − ymvx = m(xvy − yvx). Продифференцировав, получим:
(mz(m v )) = m(ddxt vy + ddyt vx)+ (xm ddvty − ym
справа равна нулю, а вторая совпадает с Jmz(F ) = xFy − yFx , отсюда:
Jddt (mz(m v )) = mz(F ), что и требовалось доказать. Относительно произвольного центра запишется как: Jddt (m0(m v )) = m0(F ).
Страница (2 из 5(
Билет 13
13.2 — Кинетическая энергия в 3х случаях движения тела
1) Поступательное движение
Поступательное движение — такое движение, при котором все точки тела движутся с одинаковыми скоростями, равными скорости движения центра масс.
То есть, для любой точки Ji |
C |
|
|
|
|
||||||
JT пост = ∑ |
mivC2 |
= |
1 |
( |
∑mi |
) |
vC T пост = |
1 |
MvC |
2, где MJ — масса всего |
|
2 |
2 |
2 |
|||||||||
i |
|
i |
|
|
|
||||||
тела.
JT не зависит от направления движения
2) Вращательное движение
Вращательное движение — такое движение, при котором тело вращается вокруг какой-нибудь оси POz, а скорость любой его точки
Jvi = ωhi , где Jhi — расстояние точки от оси вращения, а J — угловая скорость тела. Подставляя это значение и вынося общие множители за скобку, получим:
i |
m ω2h 2 |
|
2 |
( |
i |
) |
|
i |
2 |
|
|||||
JT вращ = ∑ |
i |
= |
1 |
|
∑mihi |
vC . Величина |
|
|
|
|
|
||||
в скобке представляет собой ничто иное как момент инерции, соответственно: JT вращ = 12 Izω2
JT не зависит от направления движения
При вращении вокруг неподвижной точки кинетическая энергия определяется как:
JT вращ = 12(Ix(ωcos(α))2 + Iy(ωcos(β))2 + Iz(ωcos(γ))2)
Или окончательно: JT вращ = 12(Ixωx2 + Iyωy2 + Izωz2), где
JIx, Iy, Iz — моменты инерции тела относительно главных осей инерции J1 1 1 в неподвижной точке JO; J x y z — проекции вектора мгновенной угловой скорости Jω на эти оси.
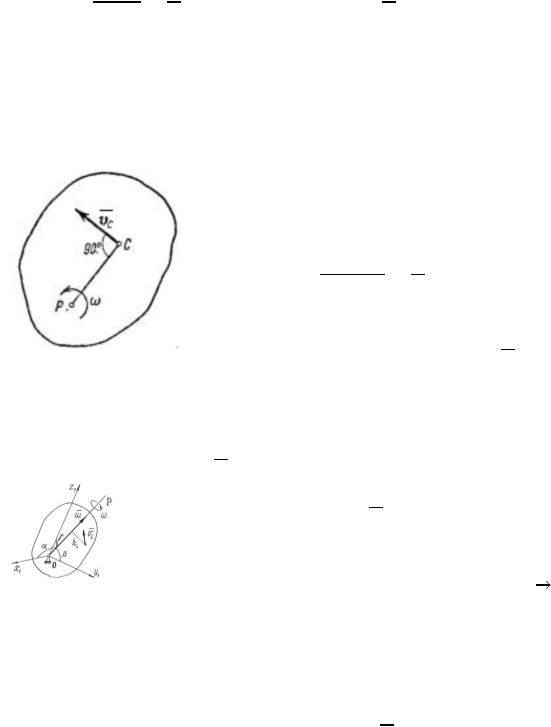
3) Плоскопараллельное движение
Плоскопараллельное движение — такое движение, при котором скорости всех точек тела в каждый момент времени распределены так, как если бы тело вращалось вокруг оси, перпендикулярной к плоскости движения и проходящей
через мгновенный центр скоростей JP: JT плоск = 12 IPω2 , где JIP — момент
инерции тела относительно названной выше оси; J —угловая скорость тела. Величина JIP в формуле будет переменной, так как положение центра JP при движении тела все время меняется. Потому, вместо JIP введем постоянный
Страница (3 из 5(