Материал: Teoria_Rysina_1-22
Билет 18
18 — «Принцип Даламбера. Принцип возможных перемещений. Примеры вычисления реакций опор и расчета фермы.»
18.1 -- Принцип Даламбера
Пусть материальная точка массы
Jс о в е р ш а е т н е с в о б о д н о е
дв и ж е н и е о т н о с и т е л ь н о
инерциальной системы OxyzJ под действием активной силы FJ α и реакции связи RJ , Определим
в е к т о р : ΦJ = − m a — с и л а инерции (Д’Аламберова сила) материальной точки.
Непосредственно принцип: «Если к силам, действующим на
материальную точку, условно присоединить силу инерции точки, то получим уравновешенную систему сил: P(Fa, R, Φ)~0 или FP a + R + Φ = 0» / «Если к
материальным точкам движущейся механической системы, кроме фактически действующих на них активных сил и реакций связей, условно приложить также силы инерции точек, то получим уравновешенную систему сил, к которой можно применять все уравнения статики.»
Принцип Даламбера эквивалентен основному уравнению динамики и наоборот, из основного уравнения динамики можно вывести принцип Даламбера. В отличии от ОУД, принцип выражает этот закон в форме уравнения статики (метод Кинетостатики), удобный при решении первой задачи динамики ( по заданному движению и известной массе материальной точки требуется определить силу, действующую на эту точку, или, если на материальную точку действует несколько сил, определить одну из них.)
18.2 -- Принцип возможных перемешений
Возможные перемещения — перемещение, согласованное со связями.
Связи — любого вида ограничения, накладываемые на положения, скорости точек механической системы, независящие от действующих сил. Независимые от времени связи — Стационарные. Всегда выражается функцией: 1) yJ = 0 — невысвобождающаяся (двухсторонняя) связь; 2) yJ > 0; y < 0 — односторонняя связь:
1)ƒJ (x, y, z — геометрические связи
2)ƒJ (x, y, z, … — кинематические связи
3)ƒJ (t — реономная связь
4)ƒJ (r , v ) — склерономная связь
5)Неголономные связи — не интегрируемая геометрическая связь.
Страница (1 из 2(

Билет 18
Идеальные связи — такие связи, работа реакций которых на любых возможных перемещений равна нулю
«Для равновесия механической системы с идеальными удерживающими связями, необходимо и достаточно, чтобы возможная работа активных сил была равна нулю: JδA = 0»
Принцип свободных перемещений позволяет решать самые разнообразные задачи на равновесие механических систем — находить неизвестные активные с и л ы, о п р е д е л я т ь р е а к ц и и с в я з е й, н а х о д и т ь п о л о ж е н и я равновесия механической системы под действием приложенной системы сил.
18.3 — Примеры вычисления реакций опор и расчета фермы
Расчет реакций опор:
3.Составление уравнений равновесия: J∑Fx = 0; ∑Fy = 0; ∑M0(F ) = 0 (Число уравнений должно равняется числу неизвестных).
4.Составление уравнений моментов.
Расчет фермы:
1.Метод вырезания узлов (каждый узел вырезать и получить необходимые значения JSi)
2.Метод сечения Риттера (разрезание фермы тремя разрезами, чтобы ферма разделилась на 2 независимые части и проще выразить необходимые реакции)
3.Графический метод построения Диаграммы Максвелла-Кремоны (построение диаграммы в масштабе и с помощью линейки вычисление примерных значений реакций стержней фермы)
(хз что тут еще писать, plz send help)…
————————
Страница (2 из 2(
Билет 19
«Принцип возможных перемещений. Задача о прессе и задача о раздвижном кронштейне»
19.1 -- Принцип возможных перемешений
Возможные перемещения — перемещение, согласованное со связями.
Связи — любого вида ограничения, накладываемые на положения, скорости точек механической системы, независящие от действующих сил. Независимые от времени связи — Стационарные. Всегда выражается функцией: 1) yJ = 0 — невысвобождающаяся (двухсторонняя) связь; 2) yJ > 0; y < 0 — односторонняя связь:
1)ƒJ (x, y, z — геометрические связи
2)ƒJ (x, y, z, … — кинематические связи
3)ƒJ (t — реономная связь
4)ƒJ (r , v ) — склерономная связь
5)Неголономные связи — не интегрируемая геометрическая связь. Идеальные связи — такие связи, работа реакций которых на любых возможных перемещений равна нулю
«Для равновесия механической системы с идеальными удерживающими связями, необходимо и достаточно, чтобы возможная работа активных сил была равна нулю: JδA = 0»
Принцип свободных перемещений позволяет решать самые разнообразные задачи на равновесие механических систем — находить неизвестные активные с и л ы, о п р е д е л я т ь р е а к ц и и с в я з е й, н а х о д и т ь п о л о ж е н и я равновесия механической системы под действием приложенной системы сил.
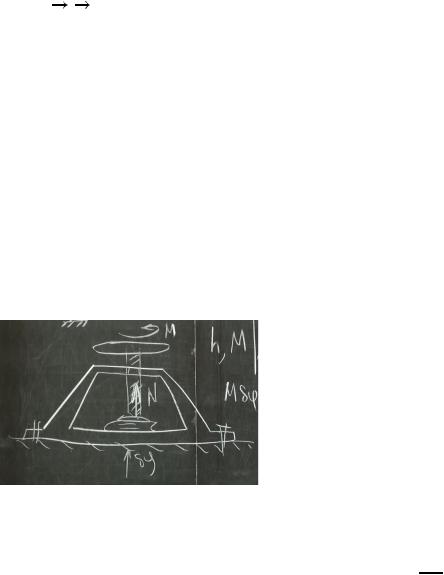
19.2 — Задача о прессе
Дано: JM — момент; Jh — шаг резьбы Найти: JN — реакция опоры книги.
Применим принцип свободных перемещений. Допустим, что происходит поворот на Jδφ от момента, с совершением положительной работы, а JN тогда совершит отрицательную работу под прессом Jδy:
JM · δφ − Nδγ = 0. Чтобы связать с данными параметрами в условии задачи, экстраполируем Jδφ до J2π, и, соответственно, раз происходит полный оборот, Jδy
2π
становится шагом резьбы Jh, соответственно: JN = M h .
Страница (1 из 2(
Билет 19
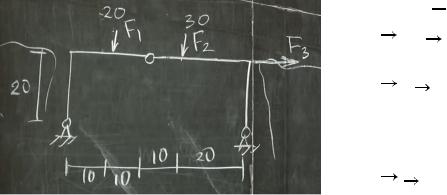
19.3 — Задача о раздвижном кронштейне
3
Дано: Jω1 = 2 ω2
J∑(Fk · δ r k) = 0
k
J∑(Fk · v k) = 0
k
J∑Mkφk = 0 k
J∑(Mk ωk) = 0
k
J50XBω2 + 20F2ω2 + 30F3ω2 + 10F1ω1 = 0
J5XB + 4 + 3 + 3 = 0 XB = − 2 кН
Страница (2 из 2(
Билет 20
20 — Обобщенные координаты. Общее уравнение динамики в обобщенных координатах. Уравнение Лагранжа 2го рода. Тождества Лагранжа.
20.1 — Обобщенные координаты
Обобщенные координаты — число степеней свободы точки и тела. Параметры, описывающие конфигурацию динамической системы относительно некоторой
эталонной конфигурации. Jri = ri(q1, q2, …, qj, …, qs). Обычно имеют размерность длины (метры) и угла поворота (радианы)
Степень свободы — минимальное числ независимых параметров, описывающее состояние системы.
20.2 — Общее уравнение динамики в обобщенных координатах. Уравнение Лагранжа 2-го рода
N |
¨ |
|
|
|
a |
= 0, в обобщенных |
|||
Общее уравнение динамики: J∑(Fk |
− mk r k) · δ r k |
|||
k=1 |
d ∂T |
|
∂T |
|
|
|
|
||
координатах выглядит следующим образом: Jdt (∂q˙i )− |
∂qi |
= Qi — |
||
Уравнение Лагранжа 2-го рода, где JQi = Qia + QiR, (i = 1,2, …, R) — полные обожженные силы, учитывающие как активные силы так и реакции неидеальных связей. Соответственно, на каждую обобщенную координату найдется свое уравнение Лагранжа второго рода. Используя их, можно найти закон движения системы в обожженных координатах.
20.3 — Тождества Лагранжа
|
d r η |
s |
∂ r η |
|
∂ r η |
|
Jr η = r η(q1, q2, …, qs, t) Vη = |
dt |
= r η(q1, q2, …, qs, t) = ∑ |
∂qi |
q˙i + |
∂t |
Vη = Vη(qi, q˙i, t) |
|
|
i=1 |
|
|
|
|
|
|
dVη |
|
s |
∂Vη |
|
s |
|
∂Vη ˙. |
∂Vη |
|
|
||
J a η = |
dt |
= ∑ |
∂qi |
q˙i + ∑ |
∂q˙i |
qi + |
∂t |
и отсюда мы получаем |
||||||
|
|
|
i=1 |
|
|
i=1 |
|
|
|
|
|
|
||
Торжества Лагранжа: |
|
|
|
|
|
|
|
|
|
|||||
d |
∂ r η |
= |
∂Vη |
; |
∂ r η |
= |
∂V |
η |
; |
d ∂ r η |
= |
∂Vη |
|
|
J |
∂qi |
∂qi |
∂qi |
∂q˙i |
dt |
∂t |
∂t |
|||||||
dt |
|
|
|
|
|
|
||||||||
Страница (1 из 1(