Материал: Teoria_Rysina_1-22
Билет 13
момент инерции JIC , относительно оси, проходящей через центр масс JC тела. По теореме Гюйгенса-Штейнера: IJP = IC + Md2 , где Jd = PC. Подставим это выражение для JIP. Учитывая, что точка P — мгновенный центр скоростей, и, соответственно: Jωd = ω · PC = vC, где JC — скорость центра масс JC. Тогда:
JT плоск = 12 MvC2 + 12 ICω2.
Теорема Кенига: «Кинетическая энергия материальной системы равна сумме кинетической энергии при поступательном движении вместе с центром масс и кинетической энергии ее при движении относительно координатных осей, поступательно движущихся вместе с центром масс.»
13.3 — Моменты инерции
Момент инерции (относительно оси) — скалярная величина, равная сумме произведений масс всех точек (тел) системы на квадраты их расстояний от этой оси.
Пусть это будет ось JOz. Тогда: Jz = ∑mkhk2 ; (J 0)
k
В выражении через координаты осевой момент инерции J относительно осей запишется:
Jx = ∑mk(yk2 + zk2) ; Jy = ∑mk(xk2 + zk2) ; Jz = ∑mk(xk2 + yk2) |
||
k |
k |
k |
Радиусом инерции тела является линейная величина Jk , определяемая выражением: J = Mρk , где JM — масса тела, Jk — расстояние от оси JOz до точки, в которой нужно сосредоточить всю массу JM тела, чтобы момент инерции этой точки относительно этой оси равнялся моменту инерции тела.
Моменты инерции относительно осей, зависят от выбора этих осей и относительно этих осей разные.
Теорема Гюйгенса-Штейнера:
«Момент инерции тела относительно данной оси равен моменту инерции относительно оси ей параллельной, проходящей через центр масс тела сложенному с произведением массы всего тела на квадрат расстояния между
осями: JOZ = JCZ′!+ Md2 »
13.4 — Центробежный момент инерции
Если через точку JO провести координатные оси JOxyz, то по отношению к этим осям, центробежными моментами инерции (или произведениями инерции)
Jxy = ∑k mk xk yk
называют величины Jxy, Jyz, Jzx, определяемые равенствами: Jyz = ∑k mk yk zk ,
Jzx = ∑k mk zk xk
где J k — массы точек; Jk k k — их координаты, при этом видно что Jxy = Jyx и
так далее. Для сплошных тела эти формулы принимают вид: Jxy = ∫(V ) ρxydV…
Страница (4 из 5(
Билет 13
13.5 — Осевой момент инерции
Момент инерции (относительно оси) — скалярная величина, равная сумме произведений масс всех точек (тел) системы на квадраты их расстояний от этой оси.
Пусть это будет ось JOz. Тогда: Jz = ∑mkhk2 ; (J 0). Осевой момент
k
инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, как масса тела является мерой его инертности в поступательном движении.
13.6 — Тензор инерции
Тензор инерции — тензорная величина, связывающая момент импульса тела и кинетическую энергию его вращения с угловой скоростью
|
|
Lx = Jxxωx + Jxyωy + Jxzωz |
||
JL = J ω ; |
JLy = Jyxωx + Jyyωy + Jyzωz , совокупность величин |
|||
|
|
Lz = Jzxωx + Jzyωy + Jzzωz |
||
Jxx, Jxy, Jxz, Jyx, Jyy, Jyz, Jzx, Jzy, Jzz определяют тензор инерции: |
||||
|
Jxx Jxy Jxz |
|||
Jyx |
Jyy |
Jyz . Диагональные элементы тензора Jxx, Jyy, Jzz называются |
||
JJ = |
||||
|
Jzx |
Jzy |
Jzz |
|
осевыми моментами инерции
Недиагональные Jxy, Jxz, Jyx, Jyz, Jzx, Jzy — центробежные моменты инерции.
Тензор инерции симметричен, так как Jxy = Jyx, Jxz = Jzx, Jzy = Jyz .
Симметричный тензор всегда можно привести к диагональному виду, то есть выбрать такую систему координат, определяемую формой тела, в которой все недиагональные элементы будут равны нулю. Соответствующие направления координатных осей называются главными осями инерции, а величины
Jx = Jxx, Jy = Jyy, Jz = Jzz — главными моментами инерции. Оси, проходящие
через центр масс тела — центральный оси, а оси, проходящие через центр масс и одновременно являющиеся главными — главные центральные оси.
Страница (5 из 5(
Билет 14
14 — Четыре теоремы динамики системы.
1) Теорема о движении центра масс механической системы.
«Произведение массы системы на ускорение ее центра масс равно векторной сумме всех действующих на систему внешних сил: MP · a C = ∑ Fek »
k
MJ = ∑mk — Масса системы
k
1
Ja C = v C = M ∑k mk a k — ускорение центра масс системы
1
Jv C = r C = M ∑k mk v k — скорость центра масс системы
1
Jr C = M ∑k mk r k — радиус вектор (координаты) центра масс системы
Jr k = (xk, yk, zk ; J k — координаты (относительно неподвижного центра) и массы точек, из которых состоит система.
2) Теорема об изменении количества движения
«Количество движения (импульс) системы равно произведению массы всей системы на скорость ее центра масс или сумме количества движения (сумме импульсов) отдельных точек или частей, составляющих систему:
JQ = M v C = ∑mk v k »
k
Дифференциальная форма: «Производная по времени от количества движения (импульса) системы равна векторной сумме всех действующих на
систему внешних сил: JdQ = ∑ Fe »
dt k k
Интегральная форма: «Изменение количества движения (импульса) системы
за некоторый промежуток времени равно сумме импульсов внешних сил за тот |
|
же промежуток времени: JQ1 − Q2 = ∑ S ke = ∑ t1 Fkedt » |
|
k |
k ∫0 |
Закон сохранения количества движения (импульса): «Если сумма всех внешних сил, действующих на систему, равна нулю, то вектор количества движения системы будет постоянным. То есть все его проекции на оси координат будут сохранять постоянные значения.»
3)Теорема об изменении главного момента количества движения (кинетического момента)
a)Теорема моментов: «Производная по времени от главного момента количества движения системы относительно некоторого неподвижного центра O равна сумме моментов всех внешних сил
Страница (1 из 2(

Билет 14 системы относительно того же центра:
JdL0 |
= ∑MOKe ≡ ∑mO(Fke) = ∑ |
[ |
(r k − r O) × Fke » |
||
dt |
k |
k |
k |
|
|
a) Закон сохранения главного момента количества движения |
|||||
(момента |
|
импульса) |
|
: «Если сумма моментов |
|
всех приложенных к системе |
|
внешних сил |
|||
относительно центра масс C равна нулю, то главный
момент количества движения системы относительно этого центра будет постоянным. То есть все его проекции на оси координат будут сохранять постоянные значения.»
4) Теорема об изменении кинетической энергии механической системы Дифференциальная форма: «Дифференциал (приращение)
кинетической |
энергии системы при некотором ее |
|
|
перемещении равно сумме |
дифференциалов |
||
работ на этом перемещении всех приложенных к |
|
||
системе внешних и внутренних сил: |
JdT = ∑d Ake + ∑d Aki′ » |
||
|
|
k |
k |
Интегральная форма: «Изменение кинетической энергии системы при некотором ее перемещении равно сумме работ на этом перемещении всех приложенных к системе внешних и внутренних
сил: JT1 − T0 = ∑ Ake + ∑ Aki′ »
k k′!
Страница (2 из 2(
Билет 15
15 — Классификация связей. Принцип Даламбера. Принцип возможных перемещений.
15.1 — Классификация связей
Связи — любого вида ограничения, которые налагаются на положения и скорости точек механической системы и выполняются независимо от того, какие на систему действуют заданные силы.
1)Стационарные (склерономные) связи — связи, не изменяющиеся со временем
2)Нестационарные (реономные) связи — связи, изменяющиеся со временем.
3)Геометрические связи — связи накладывающие ограничения на положения точек системы (их координаты)
4)Кинематические/Дифференциальные связи — связи, налагающие ограничения так же и на скорости (первые производные положений) точек системы.
5)Интегрируемые связи — дифференциальные связи которые можно представить как геометрические (можно установить зависимость между скоростями и координатами)
6)Неинтегрируемые связи — дифференциальные связи, которые нельзя представить как геометрические
7)Голономные связи — геометрические, дифференциальные
интегрируемые связи
8)Неголономные связи — геометрические, дифференциальные
неинтегрируемые связи
9)Удерживающие связи — налагаемые связи удерживающая при любом положении системы
10)Неудерживающие связи — связи, от которых система может «освобождаться»
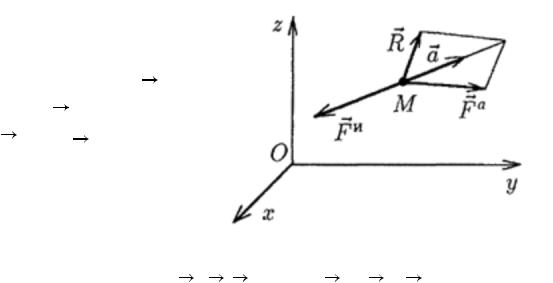
15.2 — Принцип Даламбера
Пусть материальная точка массы
Jс о в е р ш а е т н е с в о б о д н о е
дв и ж е н и е о т н о с и т е л ь н о
инерциальной системы OxyzJ под действием активной силы FJ α и реакции связи RJ , Определим
в е к т о р : ΦJ = − m a — с и л а инерции (Д’Аламберова сила) материальной точки.
Непосредственно принцип: «Если к силам, действующим на
материальную точку, условно присоединить силу инерции точки, то получим уравновешенную систему сил: P(Fa, R, Φ)~0 или FP a + R + Φ = 0» / «Если к
Страница (1 из 2(