Материал: Teoria_Rysina_1-22
Билет 21
Идеальные связи. Функция Лагранжа. Уравнение Лагранжа в форме Лагранжа.
21.1 — Идеальные связи
Идеальные связи – это связи для которых сумма элементарных работ сил реакций на любом возможном перемещении системы равна нулю. Фактически это связи без трения и деформаций.
Примеры идеальных связей:
1)Абсолютно гладкие поверхности
2)Идеальные шарниры и подшипники (без трения)
3)Нерастяжимая, абсолютно гладкая, невесомая нить
4)Абсолютно твердый стержень
21.2 — Функция Лагранжа
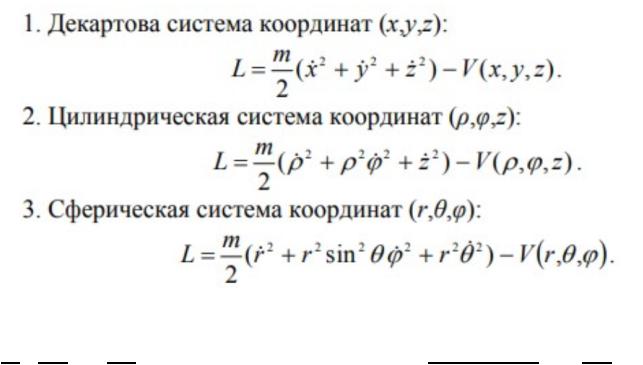
Потенциальными системами называют механические системы, для которых функция Лагранжа имеет вид L = T – U, где T и U – соответственно, кинетическая и потенциальная энергия системы, выраженные через обобщённые координаты и скорости. L - кинетический потенциал/функция Лагранжа.
В других системах координат:
|
21.3 — Уравнение Лагранжа в форме Лагранжа |
|
|
|
||
d ∂L |
∂L |
|
∂u(q1, …, qs) |
|
∂П |
|
Jdt (∂q˙i )− |
∂qi |
= 0 ; L = T − П; T = L + П; Qi = |
∂qi |
= − |
∂qi |
|
Страница (1 из 1(
Билет 22
22 — Балансировка (4 уравнения). Динамические реакции.
22.1 — Балансировка
Балансировка — уравновешивание вращающихся или поступательно движущихся масс механизмов, с тем, чтобы устранить влияние сил инерции.
Jxz = 0
Jyz = 0 — необходимые условия для отсутствия динамический реакций xC = 0
yC = 0
вращающегося с постоянной скоростью тела вокруг неподвижной оси J 22.2 — Динамические реакции
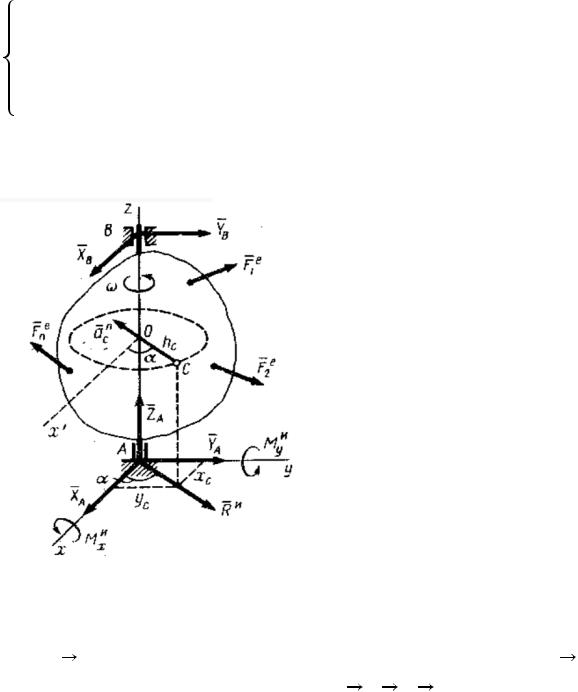
Рассмотрим твердое тело, вращающееся равномерно с угловой скоростью J вокруг оси, закрепленной в подшипниках A и B. Свяжем с телом вращающиеся вместе с ним оси JAxyz. Преимущество таких осей в том, что по отношению к ним координаты центра масс и моменты инерции тела будут величинами постоянными.
Пусть на тело действуют заданные силы JF1, F2, , Fn.Обозначим проекции главного вектора всех этих сил на оси J через JRx , Ry , Rz , а их главные моменты относительно тех же осей — черезJMx , My , Mz , ; при этом, так Jω = const , то JMz = 0. Для определения динамических реакций JXA, YA, ZA, XB, YB подшипников, т. е.
реакций, возникающих при вращении тела, присоединим ко всем действующим на тело заданным силам и реакциям связей силы инерции JΦk всех частиц тела, приведя их к центру А. Тогда силы инерции будут представлены одной силой,
равной JR И, приложенной в точке А, и парой сил с моментом, равным МJ ИA . Проекции этого момента на оси J будут: МJ ИAx,МJ ИAy,МJ ИAz= 0, так как Jω = const.
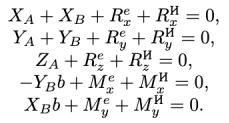
Теперь, составляя согласно принципу Д’Аламбера уравнения в проекциях на оси JAxyz (или соответствующие им уравнения равновесия) и полагая AB=b, получим
Страница (1 из 2(
Билет 22
Страница (2 из 2(