Материал: Teoria_Rysina_1-22
Билет 4
4 —Трение качения
Трение качения — сопротивление, возникающее при качении одного тела по поверхности другого.
Рассмотрим круглый цилиндрический каток радиуса JR и веса JP, лежащий на горизонтальной шероховатой плоскости. Приложим к оси катка силу JQ (рис. а), меньшую JFпр. Тогда в
точке JA возникает сила трения F,
численно равная JQ, которая будет препятствовать скольжению цилиндра по плоскости. Если считать нормальную реакцию N тоже
приложенной в точке А, то она уравновесит силу JP, а силы JQ и JF образуют пару, вызывающую качение цилиндра. При такой схеме качение должно начаться, как видим, под действием любой, сколь угодно малой силы 0. Истинная же картина, как показывает опыт, выглядит иначе.
Объясняется это тем, что фактически вследствие деформаций тел касание их происходит вдоль некоторой площадки >AB (рис. б). При действии силы >Q интенсивность давления у края >A убывает, а у края >B возрастает. В результате реакция >N оказывается смещенной в сторону действия силы >Q. С увеличением >Q это смещение растет до некоторой предельной величины >k. Таким образом, в предельном положении на каток будут действовать пара >Qпр с моментом >QпрR и уравновешивающая ее пара >N, P с моментом >Nk
k
Из равенства моментов находим >QпрR=Nk или >Qпр = R N
Пока >Q < Qпр каток находится в покое, при >Q > Qпр начинается качение. >k — коэффициент трения качения
Страница (1 из 1(
Билет 5
5 — Кинематика точки.Три способа задания движ.точки. Скорость и ускорение.
5.1 — Кинематика точки
Кинематика точки — раздел кинематики, изучающий математическое описание движения материальных точек.
Кинематика — раздел механики, содержащий учение о движении тел без учёта действующих сил. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение.
5.2 — Три способа задания движения точки:
|
|
x = x(t) |
r(t) |
1) |
Координатный способ: |
y = y(t) |
φ(t) |
|
|
z = z(t) |
z(t) |
2) |
Векторный способ: Jr (t) |
|
|
3) |
Естественный способ: |
|
|
|
a) Задание траектории |
|
|
б) Начало отсчета — точка нуль |
|
||
в) |
Дуговая координата |
J по времени: Jσ(t) = kt |
|
5.3 — Скорость и Ускорение
Скорость — быстрота изменения скорости. Является векторной величиной:
dS
Jv = τ · dt — определяет величину и направление скорости;
Jv = dS |
|
— определяет только величину скорости. |
|
|
|
||||
dt |
|
|
|
|
|
|
|
|
|
Ускорение — быстрота изменения скорости. |
|
|
|
|
|||||
d v |
d |
dS |
d2S d τ dS |
d2S |
d τ dS dS |
d |
1 dS |
2 |
v2 |
Ja = dt = dt (τ · dt ) = τ |
dt2 + dt · dt = τ |
dt2 |
+ (dS · dt )dt = τ |
dt + n |
ρ ( dt ) |
= a τ τ + n |
ρ = a τ + a n |
||
Ja τ = τ |
d v |
— касательное (тангенсальное) ускорение; |
|
|
|
||||
|
dt |
|
|
|
|
|
|
|
|
Ja n = n |
v2 |
— нормальное ускорение. J — радиус кривизны. Для окружности: |
|||||||
ρ |
|||||||||
ρJ = R, для прямой линии: J |
. |
|
|
|
|
|
|||
Ja = aτ + a n
Страница (1 из 1(
Билет 6
6 — Плоское движение.Уравнения 3х угловых скоростей.
6.1 — Плоское движение
Плоское движение — такое движение, при котором любая точка тела остается в плоскости, параллельной некоторой заданной плоскости. При этом достаточно рассматривать движение сечения твердого тела, которое параллельно некоторой плоскости: все остальные сечения движутся так же. Само тело вовсе не обязательно должно быть плоским.
Говорить о скорости тела или его ускорении в общем случае не имеет смысла: тело состоит из множества точек, каждая из которых может иметь свою скорость и ускорение. Исключение составляет поступательное движение тела, при котором равны скорости и ускорения всех точек.
6.2 — Расчет кинематики плоского движения
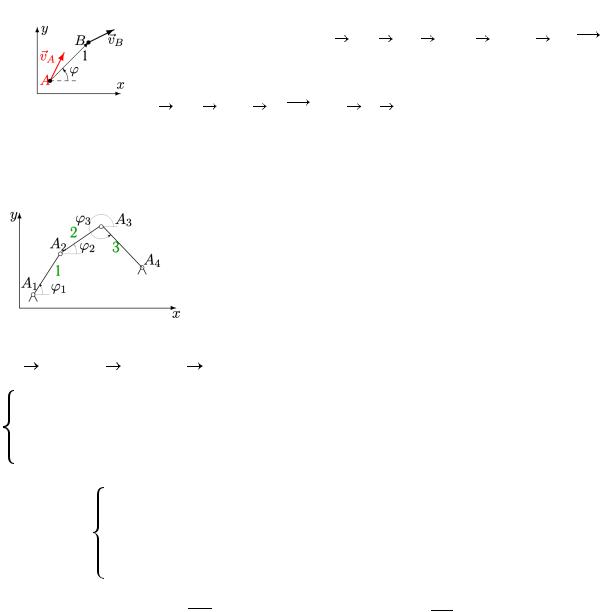
Скорость точки JB тела при плоском движении вычисляют через известную скорость какой-либо точки JA того же тела,
принимаемой за полюс: Jv B = v A + v BA , v BA = [ω1 × AB
Ускорения точке тела при плоском движении связаны формулой:
Ja B = a A + [ε × AB] + [ω × v BA
6.3 — Уравнение трех угловых скоростей
Уравнение трех угловых скоростей — уравнение, позволяющее решить четырехгренники на двух опорах. Состоит из 3-х шарнирно-соединенных стержней на двух неподвижных опорах. Четвертым звеном является основание закрепления. Механизм приводится в движение вращением одного из звеньев. Найдем связь угловых скоростей звеньев. Составляем кинематический граф:
AJ |
1 |
A ; A |
2 A ; A 3 |
A , и уравнения графа: |
|
|
|
|
||||||||||
1 φ |
|
2 2 |
φ |
2 |
3 |
|
3 φ |
3 |
4 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
· sin(φ2) − l3 · ω3 |
|
· sin(φ3) |
|||||
|
vA |
4x |
= vA |
− l1 |
· ω1 |
z |
· sin(φ1) − l2 |
· ω2 |
z |
z |
||||||||
|
|
1x |
|
|
|
|
|
|
|
|
|
|
· cos(φ3). |
|||||
|
vA |
4y |
= vA |
+ l1 |
· ω1 |
z |
· cos(φ1) + l2 |
· ω2 |
z |
· cos(φ2) + l3 · ω3 |
z |
|||||||
|
|
1x |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Координатная форма записи этих уравнений дает уравнения трех угловых
∑i3=1 |
ωiz |
· (xni − xni+1) = 0 |
— угловая скорость J i-го |
скоростей: |
|
, где J m |
|
∑i3=1 ωiz |
· (yni − yni+1) = 0 |
iz |
|
|
|||
звена,Jni ni+1 ni |
ni+1 — координаты его концов. |
||
Номера шарниров Jni = 1,4, как и номера звеньев Jmi = 1,3, не обязательно должны быть последовательными числами. Если угловая скорость одного из звеньев задана, то угловые скорости двух других легко найти из полученной
Страница (1 из 2(
Билет 6
системы уравнений. В некоторых задачах заданы все три угловые скорости, а определяется конфигурация механизма — положение звеньев, соответствующее этим угловым скоростям. В таких задачах метод МЦС не применим, метод графов в тригонометрической форме неэффективен, а уравнения трех угловых скоростей позволяют просто решить задачу.
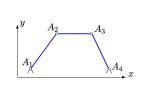
6.4 — Теорема Трапеции
Пусть J1 4 2 3. Это означает, что четырехзвенник принимает форму трапеции. Из второго уравнения трех угловых можно сказать, что угловые скорости боковых звеньев четырехзвенника, имеющего в данный момент форму трапеции, равны: J 1z 3z
Страница (2 из 2(
Билет 7
7 — Плоское движение. План скоростей. Геометрический метод. Метод графов. МЦС.
7.1 — План скоростей
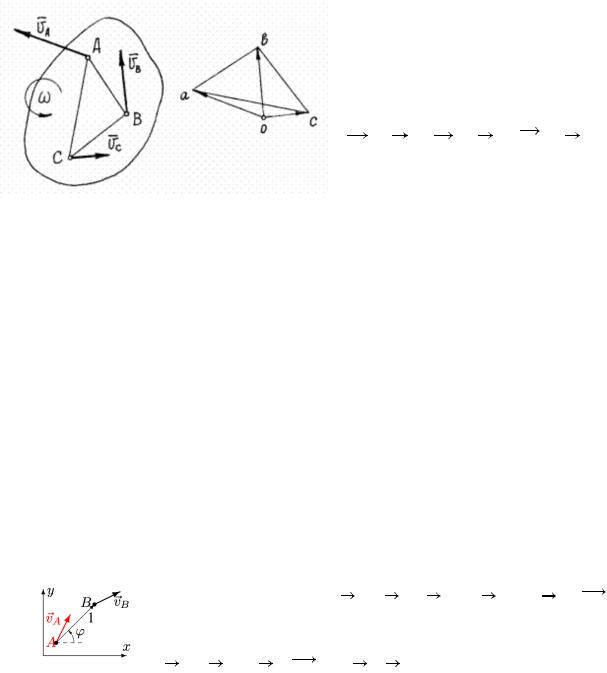
План скоростей — чертеж, на котором скорости/ускорения различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей/ускорений в данный момент времени.
Пусть известны скорости нескольких точек плоского сечения тела. Если эти скорости отложить в масштабе из некоторой точки О и соединить их концы прямыми, то получится картинка, которая называется планом скоростей. (На рисунке
oaJ = v A , oc = v C , ob = v B
(https://www.youtube.com/watch? feature=player_detailpage&v=3YppezRTWE8)
Свойства плана скоростей:
1)Стороны треугольников на плане скоростей перпендикулярны соответствующим прямым на плоскости тела.
2)Стороны плана скоростей пропорциональны соответствующим отрезкам прямых на плоскости тела.
Объединив оба свойства, можно сделать вывод, что план скоростей подобен соответствующей фигуре на теле и повёрнут относительно её на 90˚ по направлению вращения. Эти свойства плана скоростей позволяют определять скорости точек тела графическим способом.
7.2 — Геометрический метод
Геометрический метод расчета подразумевает использование плана скоростей для анализа движения, метода МЦС, графов.
7.3 — Расчет кинематики плоского движения
Скорость точки JB тела при плоском движении вычисляют через известную скорость какой-либо точки JA того же тела,
принимаемой за полюс: Jv B = v A + v BA , v BA = [ω1 × AB
Ускорения точке тела при плоском движении связаны формулой:
Ja B = a A + [ε × AB] + [ω × v BA
7.4 — Метод графов
Страница (1 из 4(