Материал: Физика1
Гармонические колебания. Смещение, скорость, ускорение при гармонических колебаниях. Дифференциальное уравнение гармонических колебаний.
Простейшим частным случаем периодических колебаний являются гармонические, т. е. такие, при которых колеблющаяся величина изменяется со временем по закону синуса или косинуса. Этот вид колебаний особенно важен по следующим причинам:
1) колебания в природе и технике часто имеют характер, близкий к гармоническому;
2) периодические колебания иной формы (с иной зависимостью от времени) могут быть представлены как наложение нескольких гармонических колебаний.
Примером таких колебаний может служить
изменение проекции радиус-вектора А,
вращающегося с постоянной угловой
скоростью 0 (рис.
7.1). При этом координата x конца
радиус-вектора изменяется по гармоническому
закону: xAcos(0t0),
или xAsin(0t0),
где
А, 0, 0
– постоянные величины. Координату
x в данный момент времени называют
смещением.
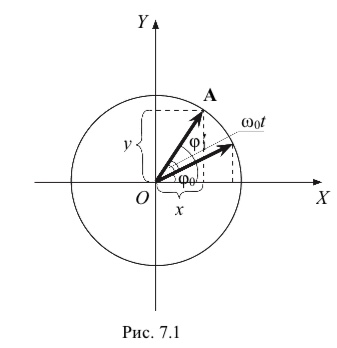
Максимальное значение A колеблющейся величины называется амплитудой. Выражение 0t 0 называется фазой колебания и определяет значение величины x в данный момент времени. Величина 0 определяет значение фазы в момент времени t 0 и называется начальной фазой. Смысл фазы в том, что она отражает состояние колебательного процесса. Зная фазу , можно по уравнению x Acos найти значение колеблющейся величины, а также характер ее изменения. Например, если фаза / 3, то это означает, что x A/2, и в данный момент величина x убывает. Таким образом, значения колеблющейся величины и скорости ее изменения вполне определяют состояние колебательного процесса.
Последовательно продифференцировав уравнение гармонических колебаний по времени, получим выражения скорости v и ускорения a материальной точки вдоль оси X:
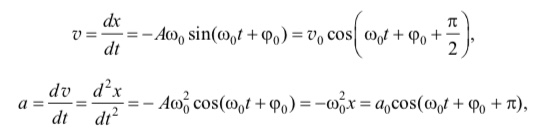
где v0 А0 и а0 А02. Из приведенных выражений видно, что скорость частицы v также
изменяется по гармоническому закону, причем амплитуда скорости равна А0. Сравнивая выражение скорости с выражением смещения x, находим,
что скорость опережает координату x в данный момент времени по фазе на / 2 (рис. 7.2).
Выражение для a также позволяет сделать вывод, что ускорение из-
меняется по гармоническому закону с амплитудой А02. Отсюда же следует, что ускорение и смещение находятся в противофазе. Это означает, что, когда смещение достигает наибольшего положительного значения, ускорение достигает наибольшего отрицательного значения, и наоборот (рис. 7.2).
Из сказанного следует, что если материальная точка совершает гармонические колебания, то справедливо уравнение а 02 x.
Математически можно показать, что эта
связь ускорения и смещения является
необходимым и достаточным условием
того, чтобы тело совершало гармонические
колебания около положения равновесия.
Следовательно, если при анализе
поставленной задачи будет найдено, что
а Cx,
где С – положительная константа,
то тело будет совершать гармонические
колебания около положения равновесия
с циклической частотой
 .
.
 По
второму закону Ньютона mаXFрез.X,
где F – проекция результирующей всех
сил, действующих на тело, на ось X,
вдоль которой совершаются колебания.
В результате получаем Fрез.X
m2x.
По
второму закону Ньютона mаXFрез.X,
где F – проекция результирующей всех
сил, действующих на тело, на ось X,
вдоль которой совершаются колебания.
В результате получаем Fрез.X
m2x.
Из этого уравнения следует, что равнодействующая всех сил, действующих на тело, совершающее гармонические колебания, прямо пропорциональна смещению и направлена в сторону, противоположную ему. Силы, пропорциональные смещению и направленные в противоположную сторону, т. е. удовлетворяющие условию FX kx, но имеющие иную природу, чем упругие, называются квазиупругими. Гармонические колебания совершаются под действием упругих и квазиупругих сил.
Дифференциальное уравнение
![]()
Гармонические колебания груза на пружине. Период колебаний.
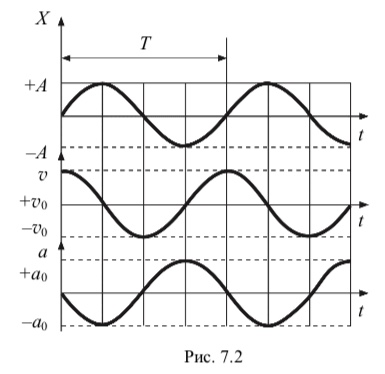
Рассмотрим в качестве примера систему, состоящую из шарика массой m, подвешенного на пружине, массой которой можно пренебречь по сравнению с m. В положении равновесия сила тяжести уравновешивается упругой силой (рис. 7.3) mg kl0, гдеl0 –удлинение пружины.
Будем характеризовать смещение шарика из положения равновесия координатой x, причем ось X направим по вертикали вниз, а точку O (начало отсчета) совместим с положением его равновесия.
Если сместить шарик в положение, характеризуемое координатой x, то удлинение пружины станет равным l0 x, и проекция результирующей силы на ось X примет значение Fmgk(l0 x).
Учитывая условие mg kl0 , получаем F kx, т. е. результирующая силы тяжести и упругой силы имеет характер квазиупругой силы.
С учетом этого уравнение второго закона Ньютона для шарика примет вид
где означает вторую производную смещения по времени; 02 k / m – собственная частота колебаний. Таким образом, в отсутствие сил трения движение под действием квазиупругой силы описывается дифференциальным уравнением
Общее решение этого уравнения имеет вид
x Acos(0 t 0 ).
Периодом колебания Т называется наименьший промежуток времени, по истечении которого значения всех величин, характеризующих колебательное движение, повторяются. За это время совершается одно полное колебание.
Превращения энергии при гармонических колебаниях груза на пружине.
Если колебания тела происходят по закону
x а cos(0t
0
), то кинетическая энергия этого
тела
а потенциальная энергия
при этом за нулевой уровень отсчета принимается положение равновесия x = 0.
Сложив кинетическую и потенциальную энергию с учетом соотношения m02 k, получим формулу полной энергии гармонического колебания
![]()
Из нее следует, что полная энергия гармонического колебания является величиной постоянной.
Действительно, поскольку квазиупругая сила является консервативной, то в отсутствие сил трения полная механическая энергия гармонического колебания должна оставаться постоянной. В процессе колебаний происходит превращение кинетической энергии в потенциальную и обратно, причем в моменты наибольшего отклонения от положения равновесия полная энергия E состоит только из потенциальной, а при прохождении системы через положение равновесия она состоит только из кинетической энергии.
Из приведенных формул следует, что

т. е. амплитуда гармонических колебаний определяется энергией, сообщенной системе.
Используя тригонометрическую форму записи формул, можно показать, что Wп и Wк изменяются с частотой 20, т. е. с частотой, в два раза превышающей частоту гармонического колебания.
Затухающие колебания. Логарифмический декремент затухания.
Во всех реальных случаях помимо квазиупругой силы на тело действует сила сопротивления, которая обычно считается пропорциональной скорости: Fсопр.rv, где r – коэффициент сопротивления. Уравнение второго закона Ньютона при наличии силы сопротивления имеет вид
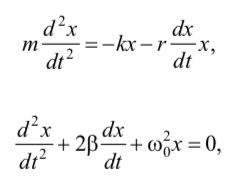
или
где 0 – частота собственных колебаний; r / (2m) – коэффициент затухания.
Решение этого дифференциального уравнения при не слишком сильном затухании имеет вид
xА0exp(t)cos(t0),
где
![]()
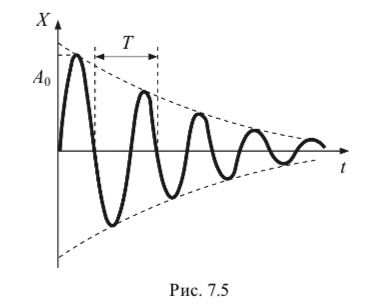
Отсюда видно, что амплитуда колебаний не является постоянной величиной, а уменьшается со временем по экспоненциальному закону: А(t) А0exp(t), где A0 – начальная амплитуда колебаний. Следовательно, колебания при наличии силы сопротивления не являются гармоническими. Такие колебания называют затухающими.
Постоянная величина ω называется круговой частотой затухающих колебаний. Величина 0 является круговой частотой колебаний в отсутствие сопротивления среды (0) и называется собственной частотой колебаний.
Вследствие работы силы сопротивления механическая энергия в процессе колебаний непрерывно уменьшается, переходя во внутреннюю энергию. Соответственно амплитуда колебаний уменьшается, и колебания постепенно затухают (рис. 7.5). Однако смещение x принимает нулевые значения через равные промежутки времени
Поэтому время T, определяемое этой формулой, и частота рассматриваются как условные период и частота затухающих колебаний. Быстроту убывания амплитуды характеризуют величиной, называемой логарифмическим декрементом затухания
где А(t) и А(t T ) – значения амплитуд, соответствующих моментам времени, отличающимся на период. Воспользовавшись уравнением для A(t), получим
откуда следует T.
Вынужденные колебания. Резонанс.
Для поддержания колебаний в системе необходимо, чтобы на нее действовала сила, работа которой компенсировала бы уменьшение механической энергии. Эта сила должна быть переменной, так как постоянная сила может только изменить положение равновесия, но не способствовать поддержанию колебаний в системе.
Колебания, возникающие в системе под действием внешней переменной силы, называются вынужденными. Переменная сила, поддерживающая в системе незатухающие колебания, называется вынуждающей.
Рассмотрим простейший частный случай вынужденных колебаний в среде, заключающийся в том, что на систему действует сила, которая изменяется со временем по гармоническому закону: F F0 cost, где F0 – амплитуда силы; – круговая частота изменения силы со временем.
Помимо вынуждающей силы на тело действуют квазиупругая сила и сила сопротивления. Тогда колебания описываются дифференциальным уравнением (второй закон Ньютона)
mаkx rvF0 cost
или
где f0 F0 /m.
С течением времени собственные колебания в системе затухнут, следовательно, вынужденные колебания происходят с частотой вынуждающей силы.
Решение уравнения установившихся вынужденных колебаний имеет вид
x Аcos(t0), где A – амплитуда вынужденных колебаний; 0 – сдвиг фаз; он представляет собой величину отставания по фазе вынужденного колебания от обусловившей его вынуждающей силы
Амплитуда А зависит от соотношения между частотой вынуждающей силы и собственной частотой 0 колебательной системы (рис. 7.6): амплитуда А вынужденных колебаний увеличивается при приближении часто- ты вынуждающей силы к собственной частоте 0 колебательной системы. Это явление называется резонансом, а частота рез, при которой амплитуда достигает максимального значения Аmax, называется резонансной частотой. Кривые зависимости значения амплитуды А от частоты (рис. 7.6) называются резонансными кривыми. Форма этих кривых и значение Аmax зависят от характера сил сопротивления среды, в которой совершаются колебания. Резонансная амплитуда тем больше (кривые 1 и 2), чем меньше сопротивление среды (β2 < β1). Резонансная кривая 3 относится к случаю, когда сопротивление в среде отсутствует (β3 = 0). Если на колеблющуюся систему действует постоянная сила, то колебания не совершаются, и отклонение системы от положения равновесия А0 = f0/ω02 называется статической амплитудой.

Явление резонанса используется в разных областях техники – в акустике, в электротехнике и т. д. При эксплуатации различных конструкций, находящихся под воздействием периодических внешних нагрузок, явление резонанса может приводить к их выводу из строя.
Физический и математический маятник. Период колебаний маятника.
Физическим маятником называется абсолютно твердое тело, совершающее колебания под действием силы тяжести вокруг неподвижной горизонтальной оси, не проходящей через его центр масс.
На рис. 7.4 изображено произвольное тело массой m, колеблющееся вокруг оси O (ось O перпендикулярна плоскости чертежа), C – центр масс, l – плечо силы тяжести.