Материал: Физика1
Перечень вопросов к теоретическому зачету по физике (лето 2020). Группы МТ-908, МТ-909, Т-910
I. Механика
Система отсчета. Радиус-вектор, перемещение, путь, скорость.
Механика изучает наиболее простую форму движения материи – механическое движение.
Механическим движением называется изменение положения тела или его частей в пространстве относительно других тел с течением времени.
Тело, относительно которого рассматривается данное механическое движение, называется телом отсчета.
Во многих задачах механики размеры и форму тела, движение которого рассматривается, можно не учитывать. Тело, размерами и формой которого в условиях данной задачи можно пренебречь, называется материальной точкой. В тех случаях, когда размерами нельзя пренебречь, его рассматривают как абсолютно твердое тело, т. е. тело, размеры и форма которого остаются неизменными при любых внешних воздействиях. Простейшими видами движения такого тела являются поступательное и вращательное движение.
Поступательным движением тела называется движение, при котором все его точки движутся по одинаковым траекториям и любая прямая, соединяющая две произвольные точки тела, остается параллельной самой себе. Поступательное движение тела может быть охарактеризовано движением какой-либо одной его точки.
Вращательным движением тела называется движение, при котором все его точки описывают окружности, находящиеся в параллельных плоскостях, а центры окружностей лежат на одной прямой, перпендикулярной этим плоскостям. Эта прямая называется осью вращения.
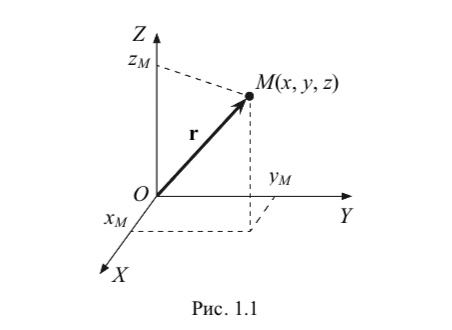
Положение материальной точки в пространстве задается с помощью координат. В прямоугольной системе координат ее положение определяется тремя координатами x, y, z или радиус-вектором r, соединяющим начало координат с материальной точкой (рис. 1.1). Его проекции на координатные оси декартовой системы координат равны координатам точки M: rхх, ryу, rzz. Пусть eх ,eу ,ez – орты системы координат – единичные векторы (их длина равна единице), направленные по осям X, Y, Z соответственно. Тогда радиус-вектор можно записать в виде суммы трех векторов: rхeх уeу zez. Длина радиус-вектора (его модуль) r х2у2z2.
Совокупность тела отсчета, системы координат и прибора для измерения длительности промежутков времени называется системой отсчета.
При движении тела его координаты и радиус-вектор непрерывно изменяются. Зависимости этих величин от времени (x = x(t), y = y(t), z = z(t) или r r(t)) называются кинематическими уравнениями движения.
Вид механического движения зависит от выбора системы отсчета, в которой это движение рассматривается. В этом заключается относительность механического движения.
Траекторией называется линия, по которой движется материальная точка. По виду траектории различают прямолинейное и криволинейное движение. Вид траектории зависит от выбора системы отсчета, в которой рассматривается данное движение.
Путь s – физическая положительная величина, равная длине участка траектории, пройденного движущейся точкой за определенный промежуток времени.
Перемещение r – вектор, соединяющий начальное и конечное положение движущейся точки (рис.1.2).
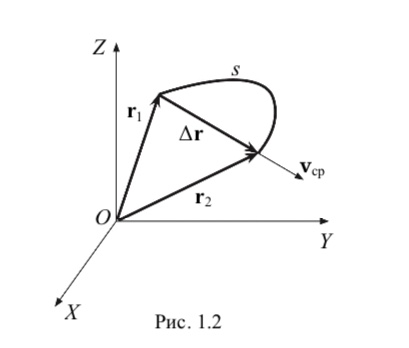
Из рис. 1.2 видно, что rr(t2) r(t1)r2 r1.
Из этой формулы следует, что перемещение равно приращению радиус-вектора r частицы за промежуток времени tt2 t1. Если Δx, Δy и Δz – проекции перемещения на оси координат, то, используя орты системы координат, можно получить выражение rхeх уeу zez.
Элементарное перемещение точки dr, т. е. ее перемещение за бесконечно малый промежуток времени dt, записываем в виде drdхeх dуeу dzez, где dx, dy и dz – элементарные перемещения точки вдоль соответствующих осей координат.
Если материальная точка совершает несколько перемещений, то результирующее перемещение равно их геометрической сумме.
Скорость – физическая величина, характеризующая быстроту изменения положения тела в пространстве.
Средняя скорость перемещения vср
– векторная величина, равная отношению
вектора перемещения r
к длительности промежутка времени Δt,
в течение которого это перемещение
совершено:

Вектор средней скорости перемещения vср совпадает по направлению с вектором перемещения r (рис. 1.2).
Средняя путевая скорость vср –
скалярная положительная величина,
равная отношению пути s к длительности
промежутка времени t,
в течение которого этот путь пройден:

В общем случае средняя путевая скорость не равна модулю средней скорости перемещения. Равенство выполняется только при прямолинейном движении материальной точки без изменения направления движения.
Мгновенная скорость v(t), или
скорость точки в данный момент времени
t, – это предел, к которому стремится
средняя скорость при неограниченном
уменьшении промежутка времени Δt:

Из определения следует, что скорость
v(t) представляет собой первую
производную по времени от радиус-вектора:

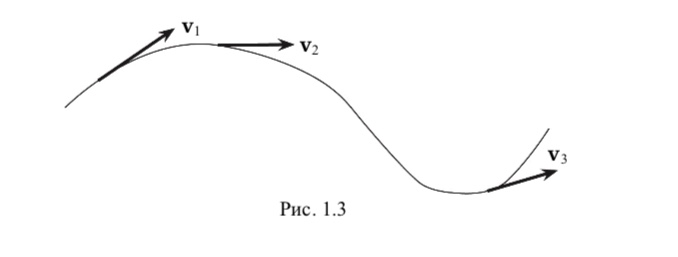
Вектор мгновенной скорости v в каждой точке траектории (т. е. в каждый момент времени) направлен по касательной к этой траектории в данной точке (рис.1.3).
Используя выражение радиус-вектора и
определение скорости, получаем v vxeхvуeyvzez,
где vx
vxeхvуeyvzez,
где vx
 , vу
, vу
 , vz
, vz
 – проекции вектора скорости v на
координатные оси (орты eх,eу,ez
являются постоянными векторами).
Таким образом, проекция скорости на
координатную ось равна первой производной
соответствующей координаты по времени.
– проекции вектора скорости v на
координатные оси (орты eх,eу,ez
являются постоянными векторами).
Таким образом, проекция скорости на
координатную ось равна первой производной
соответствующей координаты по времени.
Модуль скорости
По мере уменьшения t путь Δs, пройденный телом за этот промежуток времени, все больше приближается к r , поэтому модуль мгновенной скорости
![]()
Таким образом, модуль мгновенной скорости равен первой производной от пути по времени.
Для того чтобы определить путь s12, проходимый частицей за конечный промежуток времени t t2 t1, следует просуммировать все элементарные пути ds = v(t)dt: s12 ds.
При бесконечно большом числе бесконечно малых слагаемых ds путь s12 определяется как интеграл по времени от t1 до t2:
В международной системе единиц (СИ) путь, пройденный телом, измеряется в метрах (м), время – в секундах (с), а скорость – в метрах в секунду (м/с).
По характеру изменения модуля мгновенной скорости v(t) различают равномерное и неравномерное движение. Движение точки называется равномерным, если эта скорость не изменяется с течением времени (v = const). Если скорость зависит от времени (v v(t)) , движение точки называется неравномерным.
Ускорение материальной точки (нормальное и тангенциальное). Движение точки по окружности.
Ускорение a – физическая векторная
величина, характеризующая быстроту
изменения скорости.
Средним
ускорением aср называется
векторная величина, равная отношению
изменения скорости v
(v
v2 v1)
точки к длительности промежутка времени
Δt, в течение которого это изменение
произошло:

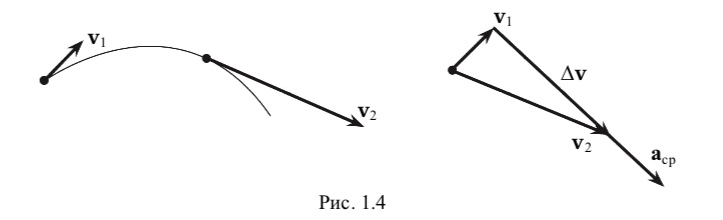
Вектор среднего ускорения aср совпадает по направлению с вектором изменения скорости v (рис. 1.4). Ускорение измеряется в метрах в секунду в квадрате (м/с2).
Мгновенным ускорением (ускорением в данный момент времени) называется предел среднего ускорения при стремлении промежутка Δt к нулю (т. е. первая производная от скорости v по времени):
![]()
Используя это определение ускорения и выражение мгновенной скорости через ее проекции, получаем
де ax  ,
ay
,
ay
 , az
, az
 – проекции вектора ускорения на
координатные оси. Таким образом, проекция
ускорения на координатную ось равна
первой производной по времени проекции
скорости на эту ось.
– проекции вектора ускорения на
координатные оси. Таким образом, проекция
ускорения на координатную ось равна
первой производной по времени проекции
скорости на эту ось.
Модуль ускорения
 .
.
При движении материальной точки вектор скорости может изменяться как по модулю, так и по направлению (рис. 1.5). В этом случае a=an +aτ.
Составляющая ускорения an, направленная перпендикулярно вектору v к центру кривизны траектории в данной точке, называется нормальным, или центростремительным, ускорением. Составляющая aτ, параллельная вектору v, называется касательным (тангенциальным) ускорением.
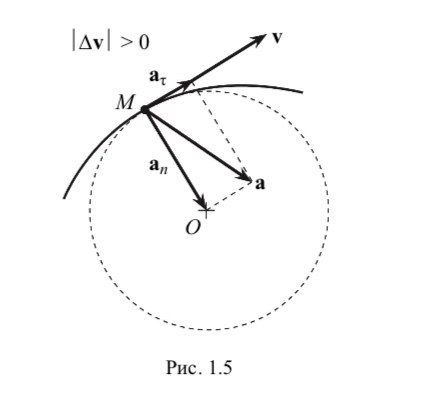
Нормальное ускорение приводит к изменению
только направления вектора скорости,
а касательное – к изменению только
модуля скорости и вычисляется по формуле

Модуль вектора ускорения
 .
.
По форме траектории и характеру изменения модуля скорости различают следующие виды механического движения: равномерное прямолинейное, неравномерное прямолинейное, равномерное криволинейное и неравномерное криволинейное.
Равноускоренное прямолинейное движение материальной точки.
Равнопеременным прямолинейным движением называется движение, при котором ускорение точки не зависит от времени: a = const.
Скорость точки в любой момент времени при равнопеременном прямолинейном движении определяется выражением vv0 at. В проекциях на ось ОХ, направленную вдоль прямолинейной траектории, это уравнение имеет следующий вид: vX v0X aXt.
Равнопеременное прямолинейное движение называется равноускоренным, если направления векторов a и v совпадают (в этом случае v0 X 0, aX 0 или v0 X 0, aX 0 ). Скорость при равноускоренном движении увеличивается с течением времени по закону vv0 at.
Равнопеременное прямолинейное движение называется равнозамедленным, если векторы a и v противоположны по направлению (в этом случае v0X 0, aX 0 или v0X 0, aX 0). Скорость при равнозамедленном движении до момента остановки тела уменьшается с течением времени по закону vv0 at.
Графики зависимости величины скорости от времени v = v(t) для равноускоренного а и равнозамедленного б движения приведены на рис. 1.12. Из этих графиков видно, что тангенс угла наклона линии графика к оси времени α численно равен ускорению тела a.
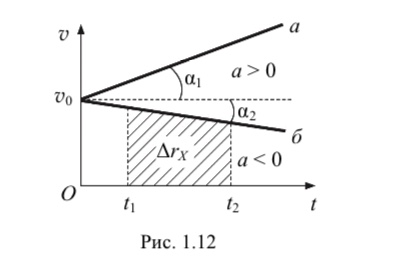
Площадь заштрихованной на рис. 1.12 области численно равна проекции вектора перемещения Δr на ось координат ОХ.
Пройденный телом путь s при равнопеременном движении можно вычислить по одной из формул:
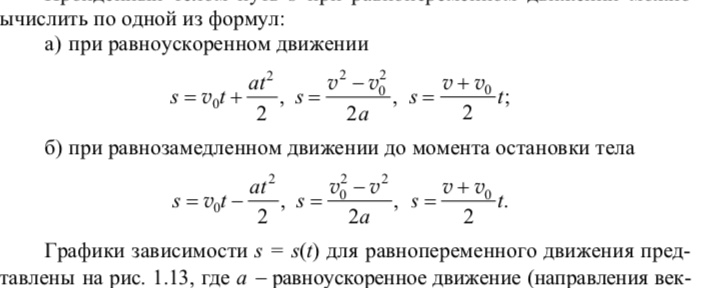
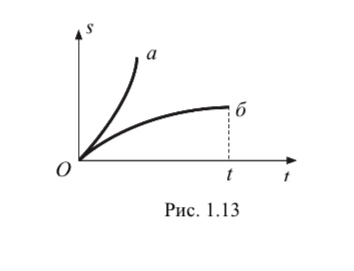
Графики зависимости s = s(t) для равнопеременного движения представлены на рис. 1.13, где а равноускоренное движение (направления век- торов a и v совпадают), б равнозамедленное движение до момента остановки тела t (направления векторов a и v противоположны).
Уравнение координаты х точки, движущейся равнопеременно и прямолинейно, имеет следующий вид:
где x0 – координата точки в момент времени t = 0, знак ее определяется положением этой точки на оси координат, а знаки v0X и aX – направлением векторов скорости v и ускорения a относительно оси OХ.