Материал: Физика1
Инерциальные системы отсчета. Первый закон Ньютона. Принцип относительности Галилея. Закон сложения скоростей.
Первый закон Ньютона: материальная точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока внешнее воздействие не изменит этого состояния.
Система отсчета, в которой материальная точка в отсутствие внешних воздействий покоится или движется равномерно и прямолинейно, называется инерциальной системой отсчета, а движение точки – движением по инерции. Таким образом, первый закон Ньютона устанавливает существование инерциальных систем отсчета.
Принцип относительности Галилея был сформулирован для классической механики и заключается в следующем:
Физические процессы в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения.
Этот закон устанавливает связь между скоростями v и v′ материальной точки М в двух разных системах отсчета, одна из которых XOY неподвижна, а вторая X'O'Y' движется относительно первой со скоростью u таким образом, что оси остаются параллельными (рис. 1.11).
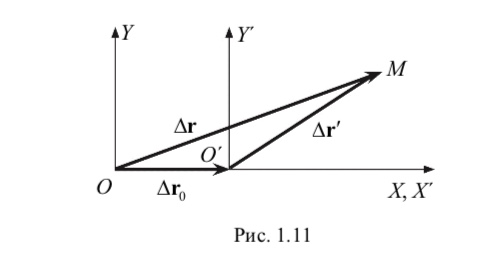
Пусть за промежуток времени Δt точка переместилась на Δr′ в системе отсчета X'O'Y', а сама система X'O'Y' переместилась относительно системы XOY на Δr0.
Перемещение Δr точки в системе XOY равно сумме перемещений: r r r0 .
Разделив это равенство на Δt и устремив Δt к 0, получим v v u, где v – скорость тела относительно неподвижной системы отсчета XOY; v′ – скорость тела в подвижной системе отсчета X'O'Y'; u – скорость движения подвижной системы отсчета X'O'Y' относительно неподвижной системы отсчета XOY.
Полученное соотношение выражает закон сложения скоростей:
скорость тела относительно неподвижной системы отсчета равна сумме векторов скорости тела относительно подвижной системы отсчета и скорости подвижной системы относительно неподвижной.
Закон сложения скоростей для случая прямолинейного движения тела и движения подвижной системы отсчета вдоль оси OX сводится к уравнению вида vx vx ux.
Сила. Второй закон Ньютона. Масса. Третий закон Ньютона.
Сила – векторная физическая величина, которая является количественной мерой механического воздействия на тело других тел или силовых полей. Сила F полностью задана, если заданы модуль, направление и точка ее приложения О (рис. 2.1).
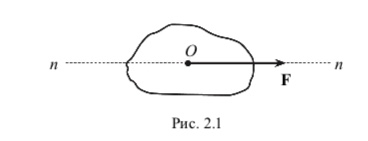
Прямая n–n, вдоль которой направлена сила, называется линией действия силы. Перенос точки приложения силы в твердом теле по линии ее действия не изменяет результата действия этой силы.
Силы, с которыми тела механической системы взаимодействуют между собой, называются внутренними силами. Силы, с которыми тела, не входящие в систему, действуют на тела системы, называются внешними силами.
Система тел, на каждое из которых не действуют внешние силы, называются замкнутой (или изолированной) системой.
Если на тело действует несколько сил F1, F2, F3, ..., Fn одновременно, то их действие может быть заменено действием одной силы F, которая называется равнодействующей и равна их геометрической сумме:
Проекции равнодействующей силы на оси прямоугольной системы координат равны алгебраическим суммам соответствующих проекций всех сил:
Сила в системе СИ измеряется в ньютонах (Н).
При отсутствии взаимодействия с другими телами движущееся тело, как показывает опыт, сохраняет скорость, а при возникновении таких взаимодействий эта скорость изменяется, т. е. тело приобретает ускорение.
Свойство тела сохранять скорость в отсутствие взаимодействий и приобретать ускорение при взаимодействии с другими телами называется инертностью.
Второй закон Ньютона: ускорение a, приобретаемое материальной точкой в инерциальной системе отсчета, прямо пропорционально действующей на точку силе F, обратно пропорционально массе m точки и совпадает по направлению с вектором силы:
В проекциях на оси прямоугольной системы координат второй закон Ньютона выражается соотношениями
В другой, более общей, формулировке, второй закон Ньютона связывает между собой силу, действующую на тело, и изменение его импульса:
где Δp = p – p0 – изменение импульса точки или тела за промежуток времени t, в течение которого на тело действовала сила.
Произведение силы F на длительность промежутка времени t ее действия называется импульсом силы. С использованием понятия импульса силы Ft второй закон Ньютона может быть сформулирован следующим образом: импульс силы, действующий на тело в инерциальной системе отсчета, равен изменению импульса тела: Ft p.
Если на материальную точку или тело действуют несколько сил одновременно, то под силой F во втором законе Ньютона следует понимать равнодействующую этих сил.
При равномерном движении материальной точки или тела по окружности ускорением a во втором законе Ньютона является центростремительное ускорение. Равнодействующая всех сил, обеспечивающих это ускорение, направлена к центру окружности и называется центростремительной силой.
Количественной мерой инертности материальной точки и тела при его поступательном движении является масса (или инертная масса). Единицей массы в системе СИ служит килограмм (кг). Масса является скалярной положительной величиной.
При поступательном движении системы материальных точек или тела их масса может считаться сосредоточенной в одной точке, которая называется центром масс, или центром инерции. Радиус-вектор такой точки С равен отношению суммы произведений масс всех частиц системы на их радиус-векторы к массе всей системы:
Третий закон Ньютона: две материальные точки в инерциальной системе отсчета действуют друг на друга с силой, равной по модулю и противоположной по направлению: F12F21, где F12 – сила, действующая на первую точку со стороны второй; F21 – сила, действующая со стороны второй точки на первую.
Импульс. Закон сохранения импульса.
Импульсом материальной точки называется произведение массы точки на ее скорость: рmv. Импульсом системы n материальных точек называется геометрическая сумма импульсов всех точек, входящих в систему:
![]()
Импульсом тела называется произведение массы тела на скорость его центра масс: р mvc. Импульс измеряется в килограммах на метр в секунду (кг · м/с).
В соответствии со вторым законом Ньютона изменение импульса системы тел dp в единицу времени равно сумме всех сил Fi, действующих на
эту систему:
![]()
В общем случае на систему могут действовать как внутренние силы, так и внешние. Внутренние силы, с которыми тела системы взаимодействуют между собой, в соответствии с третьим законом Ньютона равны по модулю, противоположны по направлению, и их геометрическая сумма равна нулю.
Таким образом, изменения импульса системы определяются внешними силами:
Если система тел является замкнутой, т. е. внешние силы отсутствуют или их действие компенсировано, то изменение импульса dp = 0. Это означает, что импульс системы не изменяется. В этом и состоит закон сохранения импульса: в инерциальной системе отсчета суммарный импульс замкнутой системы тел с течением времени не изменяется.
Закон сохранения импульса может быть применен также для незамкнутых систем, если проекции всех внешних сил на какую-либо координатную ось равны нулю. В этом случае проекция импульса незамкнутой системы тел на эту ось остается без изменений.
Законы сохранения энергии и импульса позволяют изучать процессы столкновения тел, если характер действующих при столкновении сил неизвестен. В механике обычно рассматривают два предельных вида таких взаимодействий тел: абсолютно упругое и абсолютно неупругое взаимодействие (абсолютно упругий и абсолютно неупругий удары тел).
Абсолютно упругий удар – столкновение тел, при котором механическая энергия тел сохраняется. Значения и направления скоростей после взаимодействия их определяются законом сохранения механической энергии и законом сохранения импульса, из которых следует, что для двух взаимодействующих тел р1р2 р1р2,
или m1 v1 m2 v2 m1 v1 m2 v2, Wк1 Wк2 Wк1Wк2,
или
![]()
где v1 и v2 – скорости тел массой m1 и т2 до их взаимодействия, а v1 и v2 – скорости тех же тел после взаимодействия. Абсолютно неупругий удар – столкновение тел, в результате которого тела движутся вместе как единое целое с одинаковой скоростью.
В отличие от упругого взаимодействия при абсолютно неупругом выполняется только закон сохранения импульса. Закон сохранения полной механической энергии не выполняется, так как часть ее переходит во внутреннюю энергию системы. С учетом этого закон сохранения импульса для двух тел записывают следующим образом: m1 v1 m2 v2 (m1 m2)v.
Отсюда следует, что совместная скорость
движения тел после соударения будет
равна:
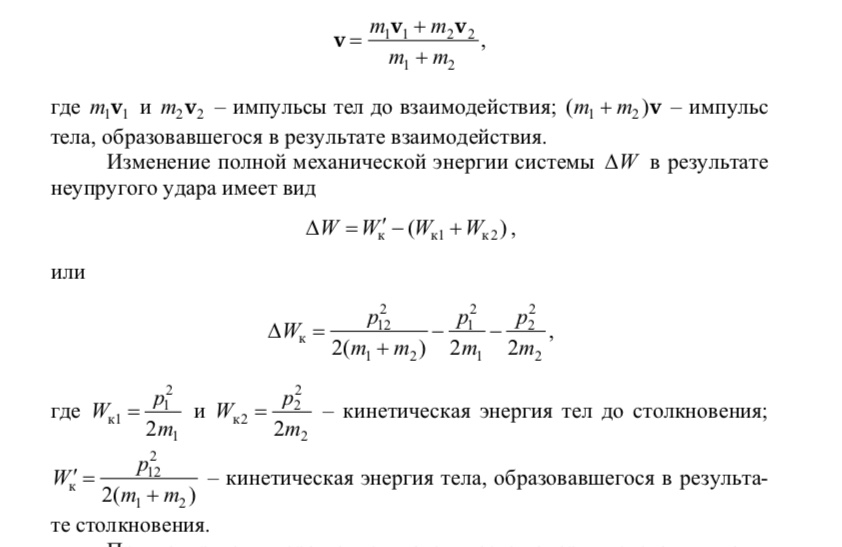
Изменение полной механической энергии системы W в результате
неупругого удара имеет вид
При неупругом ударе полная механическая энергия системы уменьшается. Этот результат не противоречит закону сохранения и превращения энергии. Дело в том, что при абсолютно неупругом ударе происходит деформация соударяющихся тел. Эта деформация сохраняется и после соударения, поэтому она называется остаточной деформацией.
Работа и мощность. Теорема о кинетической энергии.
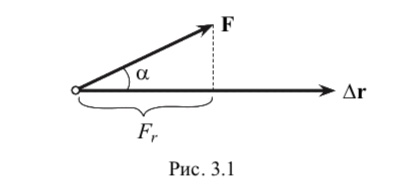
Механической работой ΔА, совершаемой постоянной силой F на перемещении Δr материальной точки, называется скалярная физическая величина, равная A Frcos, где – угол между векторами силы и перемещения (рис. 3.1).
В прямоугольной декартовой системе координат выражение работы можно записать в следующем виде:
AFX xFY yFZ z, где FX , FY , FZ – проекции силы F, а x, y, z – проекции вектора перемещения Δr на координатные оси X, Y, Z соответственно. В математике такая скалярная величина (ΔА), равная FΔrcosα, называется скалярным произведением двух векторов (F и Δr) и записывается в виде A(F, r), или AFr.
Работа силы положительна ( A 0 ), если угол между направлением вектора силы и направлением вектора перемещения материальной точки находится в пределах 0 90 .
Работа силы равна нулю (A0), если материальная точка перемещается в направлении, перпендикулярном к направлению действия силы, т.е. при =90°.
Работа силы отрицательна (A0), если угол между направлением силы и направлением перемещения тупой (90180), так как в этом случае cos 0. В частности, если перемещение происходит в сторону, противоположную направлению вектора силы, т. е. 180, то cos 1, и A Fr. Из этого следует, что работа силы трения скольжения является отрицательной.
Механическую работу при перемещении материальной точки под
действием силы можно определить с помощью графика зависимости проекции силы на направление перемещения от перемещения Fr Fr (r) : работа численно равна заштрихованной площади (рис. 3.2) под линией графика. Этот вывод справедлив для любой зависимости Fr Fr (r) (рис. 3.3).
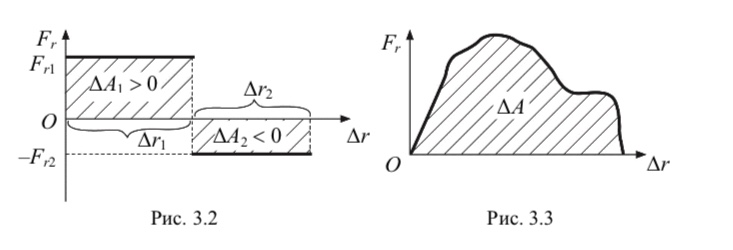
При совпадении направления перемещения с направлением вектора силы работа положительна (ΔA1 > 0). Если направления векторов силы и перемещения противоположны, то работа отрицательна (ΔA2 < 0).
Для прямолинейного движения без изменения направления скорости модуль вектора перемещения r материальной точки равен пройденному пути s, и поэтому работу можно вычислить по формуле A Fs cos . В случае если на материальную точку действует несколько сил:
F1, F2, F3, ..., Fn, то полная работа этих сил на перемещении Δr равна алгебраической сумме работы, совершаемой каждой силой на этом перемещении:
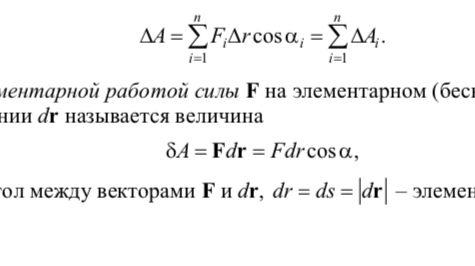
Элементарной работой силы F на элементарном (бесконечно малом) перемещении dr называется величина A Fdr Fdr cos , где – угол между векторами F и dr, dr ds |dr| – элементарный путь.
Суммируя элементарную работу, совершенную на всех элементарных участках пути от начальной точки 1 до конечной точки 2, найдем работу А12 силы F по перемещению частицы на всем пути. В математике такая сумма элементарной (бесконечно малой) работы записывается в виде интеграла: