Материал: Физика1
В системе единиц СИ работа измеряется в джоулях (Дж): 1Дж = 1Н · 1м.
Быстрота совершения работы характеризуется мощностью. Средней мощностью Nср называется физическая скалярная величина, равная отношению работы ΔА к длительности промежутка времени t, в течение которого совершается эта работа:
![]()
Так как A F r cos , средняя мощность
В этом выражении
 = vср, где vср –
средняя скорость перемещения.
Следовательно, Nср
Fvср cos,
где – угол между
векторами F и v.
Мощностью
(мгновенной мощностью) N называется
скалярная физическая величина, равная
пределу, к которому стремится средняя
мощность Nср при бесконечном
уменьшении промежутка времени t:
= vср, где vср –
средняя скорость перемещения.
Следовательно, Nср
Fvср cos,
где – угол между
векторами F и v.
Мощностью
(мгновенной мощностью) N называется
скалярная физическая величина, равная
пределу, к которому стремится средняя
мощность Nср при бесконечном
уменьшении промежутка времени t:
Используя определение скорости, это соотношение можно переписать следующим образом:
где v – мгновенная скорость; α – угол между векторами силы и скорости. Воспользовавшись определением скалярного произведения векторов, мгновенную мощность можно записать в виде N Fv. Если на материальную точку действует несколько постоянных сил F1, F2, F3, ..., Fn, то
где αi – угол между векторами силы Fi и скорости v.
В системе единиц СИ мощность измеряется в ваттах (Вт): 1Вт = 1Дж/1с.
Эффективность работы, совершаемой различными механизмами, характеризуется коэффициентом полезного действия (КПД), который определяется следующим образом:
где Nп, Aп – полезная мощность и работа механизма; Nз, Aз – затраченная механизмом мощность и работа.
Кинетической энергией Wк материальной точки или тела называется часть механической энергии, которая зависит от скоростей их движения
в данной инерциальной системе отсчета. Кинетическая энергия Wк материальной точки (или поступательно движущегося тела) с массой m равна
где v – скорость материальной точки или центра масс тела; p mv – импульс материальной точки.
Кинетическая энергия Wк механической системы, состоящей из n материальных точек или тел, равна сумме их кинетической энергии:
Мерой изменения кинетической энергии может служить работа всех сил, приложенных к данной точке или телу.
Количественно эта работа определяется теоремой о кинетической энергии: изменение Wк кинетической энергии тела при его переходе из одного механического состояния в другое равно работе всех сил, действующих на данную точку или тело: AWк Wк2 Wк1, где Wк1, Wк2 – кинетическая энергия в начальном и конечном состоянии соответственно. Действительно, в простейшем случае поступательного движения тела, когда векторы силы и перемещения направлены вдоль одной прямой в одну и ту же сторону, проекции силы F, перемещения Δr, ускорения a и скорости v на ось OX будут одного знака и равны модулям самих векторов. Работа в этом случае равна A F r. По второму закону Ньютона F ma.
При постоянной силе F модули перемещения r и скорости v тела связаны соотношением
где v1 и v2 – модули векторов скоростей материальной точки или тела в начале и конце рассматриваемого перемещения r. Подставив выражение для r в формулу работы, получим

Выражение в правой части последнего равенства представляет собой изменение кинетической энергии. Таким образом, работа всех сил, действующих на тело, является мерой изменения ее кинетической энергии.
Действие сил, работа которых на данном участке траектории положительна, приводит к увеличению кинетической энергии тела (Wк2 Wк1).
Действие сил, работа которых на данном участке траектории отрицательна, приводит к уменьшению кинетической энергии тела (Wк2 Wк1).
Потенциальные и непотенциальные силы. Механическая энергия. Закон сохранения и изменения механической энергии.
По характеру совершения работы различают потенциальные и непотенциальные силы. Силы, работа которых не зависит от вида траектории, по которой перемещается тело, а определяется только начальным и конечным его положением, называются потенциальными. В механике к таким силам относят силы тяготения и силы упругости. Силы, работа которых зависит от вида траектории, называются непотенциальными. К таким силам относятся силы трения.
Механической энергией Wмех называется скалярная физическая величина, которая характеризует движение и взаимодействие тел и зависит от их скоростей и взаимного расположения. Количественно механическая энергия определяется максимальной работой, которая может быть совершена вследствие изменения скоростей тел и их взаимодействия, обусловленного взаимным их расположением или частей одного и того же тела относительно друг друга.
Механическая энергия является суммой кинетической и потенциальной энергии.
В общем случае на тела механической системы могут действовать как потенциальные, так и непотенциальные силы, и полная работа, совершаемая при переходе системы из одного состояния в другое, будет равна AAпAнп.
В соответствии с теоремой о кинетической энергии эта работа равна AWкWк2 Wк1.
Работа же потенциальных сил определяется убылью потенциальной энергии: A Wп Wп1 Wп2.
Таким образом,
AWп Aнп,
или
Wк Wп Aнп.
С учетом того, что Wк Wк 2 Wк1, получаем Wк2 Wк1 Wп1 Wп2 Анп. Полученное выражение можно записать в виде
(Wк2 Wп2 )(Wк1 Wп1 )Анп.
Выражения в скобках представляют собой механическую энергию системы тел в начальном W1 и конечном W2 состоянии. Таким образом, W2 W1 Aнп, т. е. изменение механической энергии системы тел определяется работой непотенциальных сил.
Если в системе тел действуют только потенциальные силы, то Aнп 0, и в этом случае W2 W1. Это равенство выражает закон сохранения механической энергии: полная механическая энергия системы тел, в которой действуют потенциальные силы, остается постоянной.
Векторы угловой скорости и углового ускорения. Связь между линейными и угловыми величинами.
Движение по окружности является простейшим примером криволинейного движения. Положение материальной точки при этом виде движения (рис. 1.18) задается в любой момент времени t либо длиной дуги s, равной пройденному за промежуток времени t пути, либо углом поворота φ радиус-вектора r, определяющего положение этой точки на траектории относительно центра окружности.
Движение по окружности называется равномерным, если за любые равные промежутки времени точка проходит одинаковый путь.

Линейная скорость v материальной
точки, движущейся по окружности, равна
отношению пройденного пути (длине дуги)
s к промежутку времени t, за
который этот путь пройден:
 .
.
Момент силы, момент импульса, закон изменения момента импульса. Уравнение моментов.
Анализ поведения механических систем показывает, что кроме энергии и импульса существует еще одна механическая величина, которая может сохраняться. Эта величина называется моментом импульса.
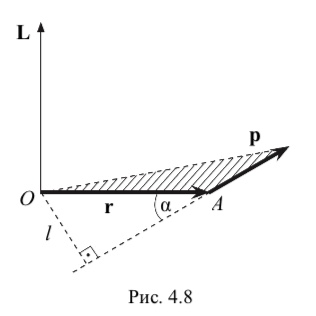
Пусть r – радиус-вектор, характеризующий положение рассматриваемой частицы (точка А на рис. 4.8) относительно некоторой точки О выбранной системы отсчета, а p – импульс этой частицы в той же системе.
Моментом импульса частицы относительно точки О называется вектор L, равный векторному произведению векторов r и p: L = [r, p].
Здесь прямоугольные скобки знак векторного произведения. По определению векторного произведения вектор L перпендикулярен векторам r и p (т. е. заштрихованной на рис. 4.8 плоскости), его направление совпадает с направлением поступательного движения правого винта при вращении его от r к p (в сторону меньшего угла между ними), а модуль вектора L равен L r p sin lp, где – угол между векторами r и p; l rsin – плечо вектора p относительно точки О (длина перпендикуляра, опущенного из точки О на направление импульса).
Выясним, от чего зависит изменение вектора L в данной системе отсчета. Для этого продифференцируем выражение для L по времени. Воспользовавшись свойством производной от произведения двух функций, получим
Поскольку точка О неподвижна, вектор
 равен скорости v частицы в
рассматриваемой системе отсчета, т. е.
совпадает по направлению с вектором p,
поэтому первое слагаемое равно нулю.
Согласно второму закону Ньютона
равен скорости v частицы в
рассматриваемой системе отсчета, т. е.
совпадает по направлению с вектором p,
поэтому первое слагаемое равно нулю.
Согласно второму закону Ньютона
где F – равнодействующая всех сил, приложенных к частице. Следовательно,
Величину, стоящую в правой части этого уравнения, называют моментом силы F относительно точки О (рис. 4.9). Обозначив ее буквой M, запишем
M = [r, F].
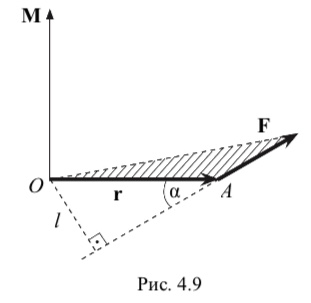
Модуль момента силы M равен M rFsinlF, где – угол между векторами r и F, а l rsin – плечо вектора F относительно точки О.
По определению векторного произведения вектор M перпендикулярен векторам r и F (т. е. заштрихованной на рис. 4.9 плоскости) и совпадает с направлением поступательного движения правого винта при вращении его от r к F.
Итак, производная по времени от момента импульса L частицы относительно некоторой точки О выбранной системы отсчета равна моменту M равнодействующей силы F относительно той же точки О:

Это уравнение называется уравнением моментов. Из него, в частности, следует, что если M = 0, то L = const. Иными словами, если относительно некоторой точки О в выбранной системе отсчета момент всех сил, действующих на частицу, равен нулю в течение некоторого промежутка времени, то относительно данной точки момент импульса частицы остается постоянным в течение этого промежутка.
Уравнение моментов позволяет: а) найти момент силы M относительно точки О в любой момент времени, если известна зависимость от времени момента импульса L(t) частицы относительно той же точки. Решение этого вопроса сводится к нахождению производной по
Угловой скоростью движения точки
по окружности называется отношение
угла поворота φ радиус-вектора r точки
за промежуток времени t к длительности
этого промежутка:
 .
.
Угол поворота φ (угловой путь) измеряют в радианах (рад), а угловую скорость в радианах в секунду (рад/с). Угол поворота можно измерять также числом оборотов N, совершенных точкой за промежуток времени t.
Связь между этими величинами устанавливается соотношением 2N.
С учетом этого выражение угловой скорости принимает следующий вид:
 ,
где величина =
,
где величина = называется частотой вращения, равно1
числу полных оборотов, совершаемых
точкой за единицу времени.
Величина,
равная промежутку времени, в течение
которого точка совершает один полный
оборот, называется периодом вращения
T: T=
называется частотой вращения, равно1
числу полных оборотов, совершаемых
точкой за единицу времени.
Величина,
равная промежутку времени, в течение
которого точка совершает один полный
оборот, называется периодом вращения
T: T= .
.
Период вращения T можно выразить через линейную v и угловую
скорость следующим образом: T= ,
где R – радиус окружности, по которой
движется материальная точка. Пройденный
материальной точкой к моменту времени
t путь s и угол поворота φ
определяются соотношениями svt,
t.
,
где R – радиус окружности, по которой
движется материальная точка. Пройденный
материальной точкой к моменту времени
t путь s и угол поворота φ
определяются соотношениями svt,
t.
При этом путь s и угол поворота φ связаны между собой равенством sR,
из которого следует связь между линейной и угловой скоростью: vR.
Так как при равномерном движении по окружности вектор линейной скорости v точки изменяется по направлению, оставаясь постоянным по модулю, точка движется с ускорением an, модуль которого определяется следующими выражениями:
Вектор ускорения an направлен к центру окружности, и поэтому ускорение точки, равномерно движущейся по окружности, называют центростремительным, или нормальным.