Материал: 2334
Моделируется ситуация провала опоры AD. Опора принимает положение A'D', а диагональ платформы – положение A'B. Отрезок AB находится в горизонтальном положении, затем платформа получает крен, отрезок AB наклоняется к горизонту на угол α и занимает положение A'B.
Для устранения угла наклона α необходимо компенсировать провал опоры, для этого необходимо определить величину провала DD':
DD' AA' AB tg . |
(3.24) |
Из формулы (3.24) может быть получено значение угла α:
arctg AA' AB . |
(3.25) |
3.6.2. Математическая модель исполнительной части устройства управления платформой
Одной из важнейших составляющих математической модели является электрогидравлический привод аутригеров платформы, осуществляющий ее перемещение относительно поверхности места установки и соответственно изменяющий угол наклона платформы к горизонту. Статические и динамические характеристики гидропривода влияют на процесс управления положением платформы и должны быть учтены при моделировании системы управления [26].
Основные элементы гидропривода строительной машины в настоящее время достаточно хорошо изучены и в зависимости от решаемых задач математически описаны с теми или иными допущения-
ми [2].
Базовые элементы гидропривода описаны системами нелинейных дифференциальных уравнений с переменными коэффициентами, начальными и граничными условиями, уравнениями существенных нелинейностей, алгебраическими уравнениями связи, наложенными на систему. Уравнения составлены таким образом, чтобы в результате решения получить значения переменных (давлений, расходов, перемещений и т.д.) на входе и выходе.
Для составления расчетной схемы гидросистемы управления целесообразно рассмотреть гидравлическую схему, которая представлена на рис. 3.22. Гидросистема управления состоит из шестеренного насоса постоянной подачи 1, блока четырехсекционного трехпозици-
60
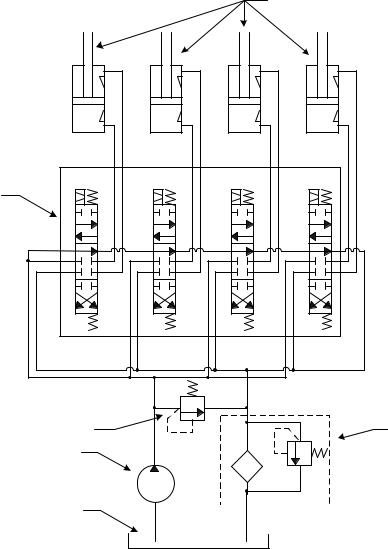
онного электрогидрораспределителя 2 (каждый блок на схеме обозначен соответствующей буквой а, б, в, г), четырех исполнительных гидроцилиндров 3 (каждый гидроцилиндр на схеме обозначен соответствующей буквой а, б, в, г, каждый гидроцилиндр снабжен встроенным гидрозамком), фильтра 4, гидробака 5. Также в систему включен предохранительный клапан 6. Все элементы имеют гидравлические соединения.
|
|
|
3 |
|
|
а |
б |
в |
г |
2 |
а |
б |
в |
г |
|
|
|
|
|
|
6 |
|
|
4 |
|
1 |
|
|
|
|
5 |
|
|
|
|
Рис. 3.22. Схема гидропривода устройства |
|||
|
управления положением платформы |
|||
|
строительной машины |
|
||
Работа гидропривода устройства управления осуществляется следующим образом. В нейтральном положении всех секций распределителя 2 поток рабочей жидкости от питающего насоса 1 поступает в гидробак через сливную магистраль с установленным на ней фильт-
61
ром 5. При подаче сигнала напряжения на одну из секций электрогидрораспределителя происходит перенаправление потока жидкости в одну из рабочих полостей соответствующего гидроцилиндра. В зависимости от полярности сигнала, подаваемого на электрогидрораспределитель 2, происходит выдвижение или втягивание штока гидроцилиндра 3.
Встроенные гидрозамки служат для предотвращения аварийной ситуации при возникновении утечек в гидролиниях. Предохранительный клапан 6 служит для предотвращения аварийной ситуации, связанной с избыточным давлением в гидросистеме, при возникновении неисправности в гидрораспределительном блоке.
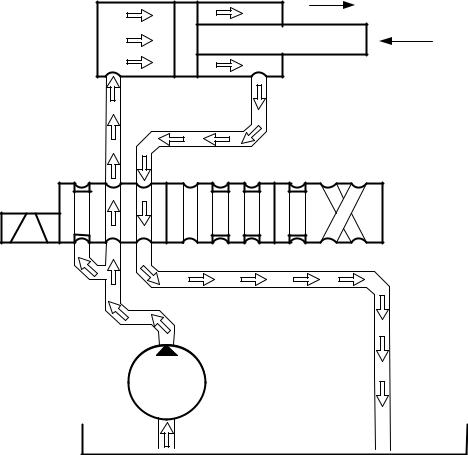
На основе рассмотренной гидравлической схемы составлена расчетная схема, которая приведена на рис. 3.23. Т.к. всю гидросхему, представленную на рис. 3.22, можно условно разделить на четыре одинаковых контура, каждый из которых управляет отдельным гидроцилиндром, то расчетная схема представлена для одного из контуров.
|
xцил |
|
Rцил |
Qцил; pцил |
Qцс; pцс |
Qрасп; pрасп |
Qлс; pлс |
|
Qс; pс |
Qлин; pлин |
|
Qн; pн
Рис. 3.23. Расчетная схема гидропривода устройства управления положением платформы
62
На схеме приняты следующие обозначения (см. рис. 3.23): Qн – подача на выходе из питающего насоса и на входе в гидролинию, соединяющую насос с гидрораспределителем; Qлин – расход на выходе из гидролинии и на входе в гидрораспределитель; Qраспр – расход на выходе из гидрораспределителя и на входе в гидролинию; Qцил – расход на выходе из гидролинии и на входе в гидроцилиндр; Qцс – расход на выходе из гидроцилиндра и на входе в гидролинию; Qлс – расход на выходе из сливной гидролинии цилиндра и на входе в сливную линию распределителя; Qc – расход на выходе из сливной линии распределителя и на входе в сливную линию гидробака; Rцил – усилие, приложенное к штоку исполнительного гидроцилиндра, обусловленное силами сопротивления подъему массы платформы; xцил – перемещение штока исполнительного гидроцилиндра; pн – давление питающего насоса; pлин – давление на входе в гидрораспределитель и на выходе из гидролинии; pрасп – давление на входе в гидролинию и на выходе из гидрораспределителя; pцил – давление на входе в исполнительный гидроцилиндр и на выходе из гидролинии; pцс – давление на входе в сливную гидролинию цилиндра и на выходе из гидроцилиндра; pлс – давление на выходе из сливной гидролинии цилиндра и на входе в сливную линию распределителя; pc – давление на выходе из сливной линии распределителя и на входе в сливную линию гидробака.
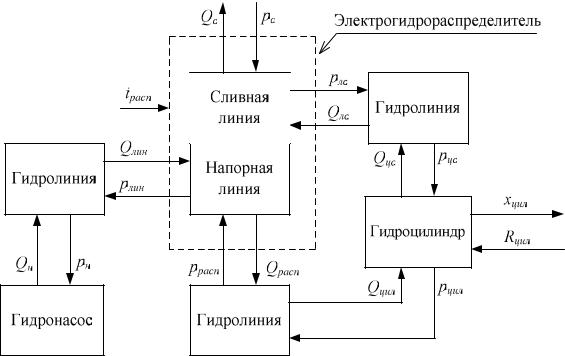
Рис. 3.24. Блок-схема гидропривода устройства управления положением платформы строительной машины
63
На основе расчетной схемы была сформирована блок-схема гидросистемы. Блок-схема представляет собой совокупность блоков и связей, которые соответствуют элементам и связям расчетной схемы. Каждый блок представляет собой подсистему или элемент гидросхемы управления платформой, который содержит в себе структурную схему элемента, выполненную на основе дифференциальных уравнений, описывающих этот элемент [15].
В предлагаемой блок-схеме каждый блок представляет собой гидравлический многополюсник или многомерный динамический объект, поэтому блоки будут иметь несколько присоединительных гидравлических или механических портов, соответствующих входным, выходным, управляющим или возмущающим воздействиям.
Блок-схема гидравлической системы управления положением платформы строительной машины представлена на рис. 3.24, где iрасп
– ток управления, подаваемый на электромагнитный блок управления гидрораспределителем. Элементами схемы являются: гидронасос, гидролинии, электрогидравлический распределитель и гидроцилиндр.
При описании математической модели гидропривода были приняты следующие допущения [15, 20, 26]:
объемный модуль упругости рабочей жидкости в период исследуемого процесса постоянен;
инерционные свойства потока рабочей жидкости в связи с их малостью не учитываются;
волновые процессы в элементах гидропривода в связи с их незначительной длиной не учитываются;
неравномерность подачи гидронасоса не учитывается;
сжимаемость жидкости в рабочих полостях гидроцилиндра не учитывается;
утечки жидкости в гидроэлементах не учитываются;
силы сухого трения в гидроцилиндрах в связи с их малостью не учитываются.
Рассмотрим математическое описание отдельных элементов гидросистемы управления положением платформы строительной машины. Необходимо отметить, что в предлагаемой работе математическая модель гидронасоса не рассматривается, поскольку насос является лишь идеальным источником энергии, достаточно мощным, чтобы обеспечить требуемую подачу рабочей жидкости в гидросистему независимо от перепада давлений в насосе. Для строительных машин характерны относительно небольшие длины гидролиний (менее 5м),
64