Материал: 2334
При этом предотвращаются ситуации отрыва опор от грунта, выдвижения штоков гидроцилиндров опор на максимальную длину, а также касания колесами машины опорной поверхности. Это повышает запас управляемости углами наклона платформы [23, 24].
Функциональная схема алгоритма, реализующего процесс управления (рис. 3.18), имеет в качестве входов первичные информационные параметры, измеряемые с помощью датчиков: l1, l2, l3, l4 – длины гидравлических опор (гидроцилиндров) от нижней поверхности подпятника гидроцилиндра до плоскости опорной платформы; αx, αy – углы наклона опорной платформы относительно горизонтальной плоскости, измеренные в двух диагональных вертикальных плоскостях платформы; pп1, pш1, pп2, pш2, pп3, pш3, pп4, pш4 – давления в поршневых и штоковых полостях гидроцилиндров опор 1–4 соответственно (см.
рис. 3.18).
Кроме того, в алгоритме используются следующие константы: Sп, Sш – площади поршневой и штоковой полостей гидроцилиндра каждой опоры соответственно; Δα – предельная погрешность измерения углов наклона платформы; ΔR – предельная погрешность косвенного измерения силы реакции на любой из опор; Rmin – минимальное предельное значение силы реакции на любой из опор (порядка 10 % от расчетной доли силы веса платформы, приходящейся на один гидроцилиндр); Δl – предельная погрешность измерения длин опор; lmin конт
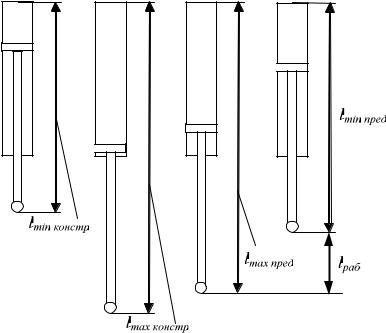
– минимальная длина отдельной гидравлической опоры, при которой обеспечивается условие отрыва пневматических ходовых элементов машины от грунта; lmax констр – максимальная длина отдельной гидравлической опоры, при которой шток выдвинут на максимально допустимую конструкцией гидроцилиндра длину; lmin пред – минимальная предельно допустимая длина отдельной опоры в рабочем режиме машины; lmax пред – максимальная предельно допустимая длина отдельной опоры в рабочем режиме машины (рис. 3.19).
Внутренними переменными параметрами алгоритма являются: R1, R2, R3, R4 – силы реакций на опорах 1, 2, 3, 4 соответственно; lmax 1234 – максимальная из четырех длин гидроцилиндров в текущий момент; lmin 1234 – минимальная из четырех длин гидроцилиндров в текущий момент.
Выходные переменные функциональной схемы с логическими элементами x1, x3, x5, x7 принимают значение 1, что соответствует выдвижению штока гидроцилиндра опор 1, 2, 3, 4 соответственно, значение 0 соответствует отсутствию выдвижения; x2, x4, x6, x8 принимают значение 1, что соответствует втягиванию штока гидроцилиндра
55
опор 1, 2, 3, 4 соответственно, значение 0 соответствует отсутствию втягивания; x9 принимает значение 1, что соответствует сигналу аварийной остановки, и значение 0, соответствующее нормальной работе системы.
Рис. 3.19. Длины гидравлических опор
На рис. 3.20 приведена блок-схема алгоритма функционирования устройства управления положением платформы строительной машины. Алгоритм однотактный без необходимости хранения данных предыдущих тактов в памяти работает следующим образом. На основе текущих значений первичных информационных параметров рассчитываются силы нормальных реакций на опорах R1, R2, R3, R4, определяются максимальные и минимальные длины lmax 1234 и lmin 1234.
R1, R2, R3, R4 рассчитываются исходя из поршневых и штоковых площадей Sп, Sш гидроцилиндров и давлений в поршневых и штоковых полостях:
R1= pп1 Sп – pш1 (Sп – Sш); |
|
R2= pп2 Sп – pш2 (Sп – Sш); |
(3.21) |
R3= pп3 Sп – pш3 (Sп – Sш); |
|
R4= pп4 Sп – pш4 (Sп – Sш). |
|
lmax1234 и lmin1234 определяются на основе текущих значенийl1 l2 l3 l4:
lmax_1234=max([l1 l2 l3 l4]); |
(3.22) |
lmin_1234=min([l1 l2 l3 l4]). |
(3.23) |
56
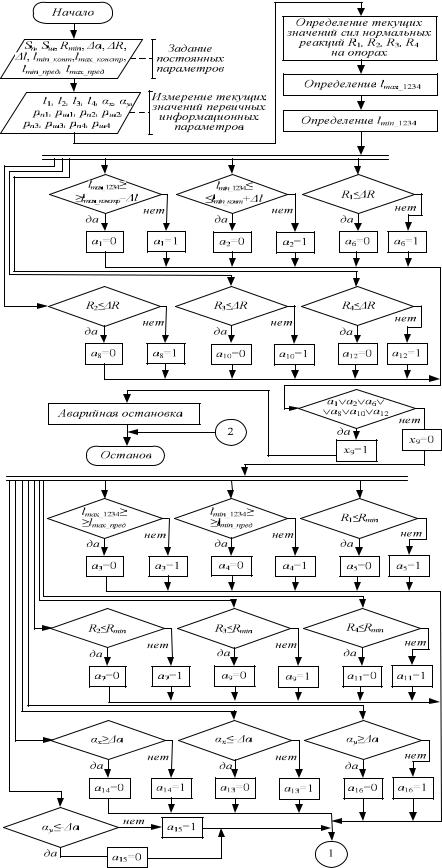
Рис. 3.20. Блок-схема алгоритма функционирования устройства управления (начало)
57
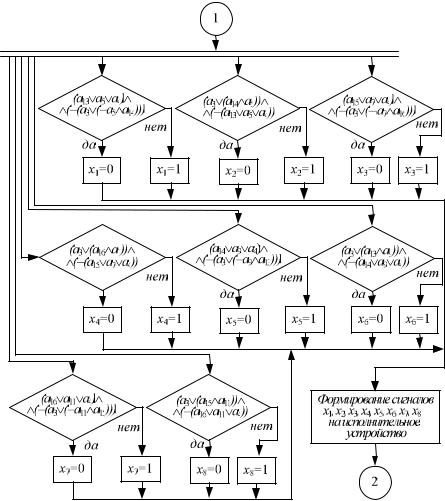
Рис. 3.20. Блок-схема алгоритма функционирования |
устройства управления (окончание) |
Затем полученные по (3.21) – (3.23) значения параметров сравниваются с константами, получаются промежуточные логические переменные со значениями 0 и 1, которые обрабатываются при помощи блоков логических операций. В результате получаются выходные переменные x1… x9, которые также принимают значения 0 и 1.
Блоки логических операций соединены таким образом, чтобы предотвратить возможность одновременного выдвижения и втягивания любой из опор (перекрестные связи), то есть выходные переменные x1 и x2, x3 и x4, x5 и x6, x7 и x8 соответственно не могут одновременно принимать значение, равное 1.
Главным отличительным признаком алгоритма является то, что измерительные оси датчиков наклона расположены перпендикулярно диагональным вертикальным плоскостям платформы. Этим обеспечивается независимое одновременное горизонтирование платформы в
58
двух ее диагональных плоскостях, причем возможно горизонтирование одновременным выдвижением одной диагональной опоры и втягиванием другой, что ускоряет процесс [23, 24].
Алгоритм достаточно прост для реализации и в то же время выполняет все поставленные задачи. Он сохраняет работоспособность, в том числе и при различных значениях скоростей движения штоков гидроцилиндров выносных опор строительной машины, что может иметь место в реальных условиях эксплуатации.
3.6. Математическая модель процесса управления положением платформы строительной машины
3.6.1. Математическая модель платформы
Платформа представляет собой жесткую металлоконструкцию, которая также жестко соединена с гидравлическими аутригерами. При описании математической модели платформы строительной машины были приняты следующие допущения:
1)конструкция платформы не деформируется и не меняет своих геометрических размеров в процессе работы строительной машины;
2)соединение аутригера с платформой не имеет люфтов.
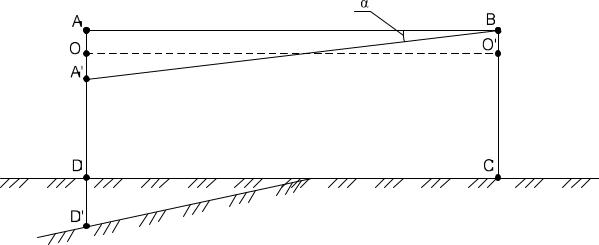
На рис. 3.21 приведена расчетная схема для определения изменения угла наклона платформы к горизонту в зависимости от длин аутригеров. AB – расстояние между диагональными аутригерами платформы; AD и BC – длины диагональных аутригеров.
Рис. 3.21. Расчетная схема для определения положения платформы |
строительной машины |
59