Материал: 2334
6.Выполнить оптимизацию параметров VВТЯГ и α по полученной регрессионной зависимости целевой функции tпп = f(VВТЯГ; α) → min, используя методы множителей Лагранжа и метод Ньютона.
|
Начало |
|
|
|
|
||
|
Задание постоянных |
|
|
|
Параметры платформы, |
||
|
|
|
|
||||
|
параметров |
|
|
|
гидропривода и |
||
математической модели |
|
|
|
устройства управления |
|||
устройства управления |
|
|
|
|
|||
|
|
|
|
|
|
|
Диапазон и шаг изменения скорости |
|
|
|
|
|
|
|
|
Задание оптимизируемых |
|
|
|
перемещения аутригеров |
|||
параметров устройства |
|
|
платформы VВТЯГ и ширины зоны |
||||
управления положением |
|
|
|
нечувствительности порогового |
|||
|
платформы |
|
|
|
элемента α |
||
|
|
|
|
|
|
|
|
|
Анализ |
|
|
|
|
Получение значений tпп и αz |
|
|
математической |
|
|
|
|
||
|
|
|
|
|
для параметров VВТЯГ и α. |
||
|
модели устройства |
|
|
|
|
||
|
управления на ЭВМ |
|
|
|
|
Запись массивов значений в |
|
|
|
|
|
|
файл |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аппроксимация зависимости tпп и |
|
|
|
|
|
|
|
|
|
Аппроксимация |
|
|
||||
|
численной |
|
|
|
|
αz от VВТЯГ и α полиномом 3-й |
|
|
зависимости tпп и |
|
|
|
|
степени. Запись регрессионных |
|
|
αz от VВТЯГ и α |
|
|
|
|
зависимостей tпп = f(VВТЯГ; α) и |
|
|
|
|
|
|
|
|
αz = f(VВТЯГ; α) |
|
|
|
|
|
|
|
|
|
Оптимизация |
|
|
|
|
|
Использование метода |
|
параметров VВТЯГ и |
|
|
|
|
|
|
|
α по целевой |
|
|
|
|
|
множителей Лагранжа и |
|
функции |
|
|
|
|
|
метода Ньютона. Запись |
|
tпп = f(VВТЯГ; α) → |
|
|
|
|
|
найденных оптимальных |
|
min при αz ≤ αzзад |
|
|
|
|
|
значений параметров |
|
|
|
|
|
|
|
|
|
Вывод |
|
|
|
|
||
|
оптимальных |
|
|
|
|
||
|
значений |
|
|
|
tпп, αz, VВТЯГ и α |
||
|
параметров |
|
|
|
|
||
Конец
Рис. 5.1. Блок-схема алгоритма САПР основных параметров устройства управления положением платформы строительной машины
110
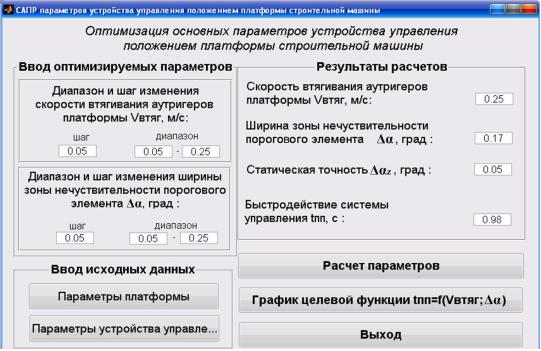
В качестве программной поддержки инженерной методики была разработана САПР основных параметров устройства управления положением платформы строительной машины в программном комплексе MATLAB, блок-схема алгоритма работы которой представлена на рис. 5.1, и графический пользовательский интерфейс САПР, который взаимодействует с рабочей областью MATLAB и его приложениями. Внешний вид интерфейса САПР представлен на рис. 5.2 и включает в себя окна для ввода численных параметров, кнопку выполнения расчета и построения графиков. Данная САПР связана с математической моделью процесса управления положением платформы строительной машины, составленной в Simulink, посредством m- файла, представляющего собой листинг программы расчета.
Программное обеспечение для автоматизации проектирования основных параметров устройства управления положением платформы строительной машины состоит из следующих компонентов:
файл математической модели процесса управления положением платформы строительной машины в Simulink;
m-файл, содержащий листинг программы расчета;
графический интерфейс САПР – основное окно программы, интерактивные окна ввода параметров подсистем математической модели процесса управления положением платформы строительной машины – «Параметры платформы», «Параметры устройства управления».
Рис. 5.2. Интерфейс САПР основных параметров устройства управления
111
Алгоритм работы САПР
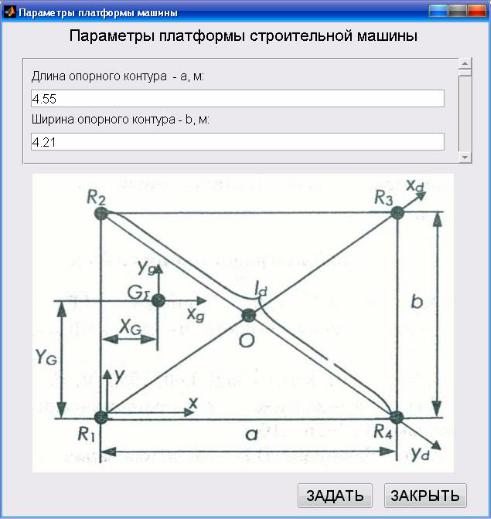
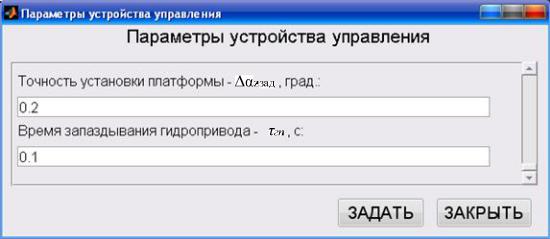
Ввод исходных данных: При нажатии кнопок выводятся окна ввода постоянных параметров математической модели процесса управления положением платформы строительной машины, которая разделена на две подсистемы: «Параметры платформы» и «Параметры устройства управления». Окна ввода параметров представлены на рис. 5.3, 5.4. После нажатия кнопки «ЗАДАТЬ» в рабочей области MATLAB автоматически формируются массивы значений параметров.
Рис. 5.3. Окно ввода параметров математической модели платформы
Ввод оптимизируемых параметров. Задаются диапазон и шаг изменения оптимизируемых параметров VВТЯГ и α. В рабочей области MATLAB автоматически формируются массивы значений параметров.
112
Расчет параметров:
а)после нажатия кнопки «Расчет параметров» запускается моделирование рабочего процесса управления положением платформы строительной машины. Производится циклический запуск и решение математической модели процесса управления, количество запусков зависит от заданных диапазонов и шага изменения оптимизируемых параметров VВТЯГ и α. В рабочей области MATLAB автоматически формируются массивы значений αz и tпп;
б)далее происходит аппроксимация численной зависимости αz и tпп от VВЫД и α методом наименьших квадратов. Происходит запись
регрессионной зависимости αz = f(VВТЯГ; α) и tпп = f(VВТЯГ; α) в виде специальной файл-функции;
в)нахождение интервалов допустимых значений VВТЯГ и α для заданной точности αzзад;
г)оптимизация и расчет параметров. Решается задача условной оптимизации целевой функции tпп = f(VВТЯГ; α) → min средствами встроенного пакета Optimization Tool.
Результаты расчетов. В данной области выводятся оптимальные значения параметров VВТЯГ, α и соответствующие им значения
αz, tпп.
Графики зависимости целевой функции. Выводится окно с гра-
фиком полученной зависимости tпп от VВТЯГ и α.
Рис. 5.4. Окно ввода постоянных параметров математической модели устройства управления
На рис. 5.3 представлен внешний вид окна ввода постоянных параметров платформы, в котором вводятся геометрические размеры
113
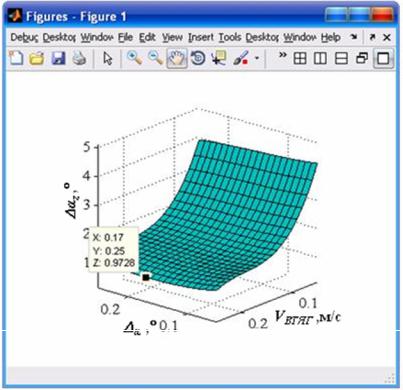
платформы. На рис. 5.4 представлено окно ввода постоянных параметров устройства управления (требуемое значение статической точности установки платформы) и гидропривода управления аутригерами платформы строительной машины (значения запаздывания гидропривода, геометрические размеры гидроцилиндра и др.). На рис. 5.5 представлен внешний вид окна с графиком полученной зависимости
tпп от VВТЯГ и α.
Расчеты, проведенные на ПЭВМ с достаточной для принятых допущений степенью точности, выполнялись за относительно короткий промежуток времени. Для работы САПР требуется компьютер с ATсовместимым процессором, с частотой не ниже 1000 МГц, укомплектованный оперативной памятью 512 Мб и более, с установленным программным комплексом MATLAB версии не ниже 7.0, включающий предустановленные пакеты: Simulink версии не ниже 6.5, Surface Fitting Toolbox и Optimization Toolbox любых версий.
Рис. 5.5. Окно с графиком полученной зависимости tпп от VВТЯГ и α
Разработанная САПР устройства управления положением платформы строительной машины позволяет производить на ПЭВМ оптимизацию параметров VВТЯГ и α согласно принятому критерию эф-
114