Материал: 2334
Рис. 3.12. График зависимости αy от αyсм при γ = 45°
Рис. 3.13. График зависимости αy от γ при αyсм=10°
Рис. 3.14. Экспериментальный макет платформы строительной машины
50
Для того чтобы подтвердить адекватность полученных зависимостей, был проведен эксперимент.
Рис. 3.15. Экспериментальный макет платформы строительной машины и прибор для измерения угла наклона платформы
На рис. 3.14 представлен экспериментальный макет платформы строительной машины. Макет имеет четыре точки опоры с поверхностью. Конструкция опор позволяет регулировать угол наклона платформы в горизонтальной плоскости, данная регулировка производится вращением штока.
Т а б ли ц а 3.1. Значенияизмерения угланаклона
γ,° |
αy1,° |
αy2,° |
αy3,° |
αy.ср,° |
αy.теор,° |
Δαy.абс,° |
0,0 |
12,0 |
12,5 |
12,0 |
12,2 |
11,9 |
0,3 |
5,0 |
12,0 |
12,0 |
11,8 |
11,7 |
11,8 |
0,1 |
10,0 |
11,5 |
11,5 |
11,7 |
11,6 |
11,7 |
0,0 |
15,0 |
11,0 |
11,0 |
11,5 |
11,2 |
11,5 |
0,3 |
20,0 |
10,5 |
11,0 |
11,5 |
11,0 |
11,2 |
0,2 |
25,0 |
10,5 |
10,5 |
11,7 |
10,9 |
10,8 |
0,1 |
30,0 |
10,0 |
10,0 |
10,0 |
10,0 |
10,3 |
0,3 |
35,0 |
9,5 |
9,5 |
9,8 |
9,6 |
9,8 |
0,2 |
40,0 |
9,0 |
9,0 |
8,5 |
8,8 |
9,1 |
0,3 |
45,0 |
8,0 |
8,5 |
8,5 |
8,3 |
8,4 |
0,1 |
50,0 |
7,0 |
7,5 |
7,0 |
7,2 |
7,7 |
0,5 |
51
Для измерения угла наклона платформы в горизонтальной плоскости использовался строительный угломер с закрепленным на нем пузырьковым уровнем. На рис. 3.15 показан макет платформы с прибором для измерения угла наклона платформы.
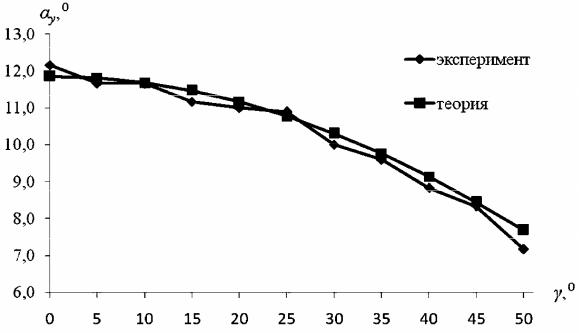
Рис. 3.16. График зависимости αy от γ
В ходе эксперимента были получены значения угла наклона платформы, измеренные при разных углах установки датчика наклона. Все измеренные значения были сведены в табл. 3.1.
Для того чтобы уменьшить случайную ошибку при измерении, измерения для каждого значения измеряемого параметра повторялись 3 раза. Из рис. 3.16, где представлен график зависимости αy от γ, видно, что теоретическая и практическая кривые совпадают, максимальное значение расхождения теоретических и экспериментальных данных Δαy.абс составляет 0,5°(см. табл. 3.1). Практический эксперимент подтвердил адекватность зависимости, полученной теоретически.
3.5. Алгоритм работы устройства управления положением платформы строительной машины
При вывешивании платформы строительной машины на выносных гидравлических опорах необходимо обеспечить выполнение следующих условий [23, 24]:
52
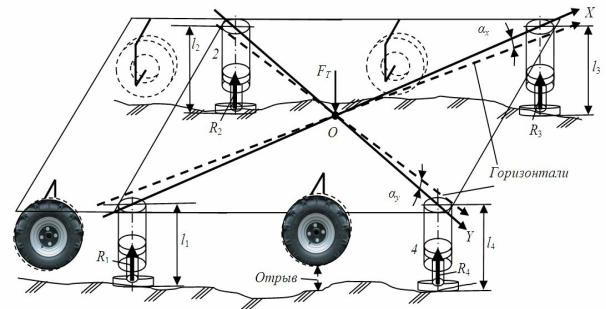
1)отрыв всех ходовых элементов (пневмоколес) опорной платформы строительной машины от грунта (рис. 3.17);
2)горизонтирование платформы (обеспечение нулевых углов наклона осей платформы αx, αy относительно горизонтальной плоскости);
3)предотвращение отрыва выносных опор от грунта (обеспечение определенной минимальной загруженности каждой опоры по силе нормальной реакции со стороны грунта на шток гидроцилиндра).
Кроме того, для повышения управляемости углами наклона платформы предлагается добавить четвертое, дополнительное усло-
вие [23, 24]:
4)непрерывное автоматическое поддержание платформы в заданном интервале высот, за счет этого достигается предотвращение ситуации выдвижения штоков на максимальную длину, а также касания колесами машины опорной поверхности, повышается запас управляемости углами наклона платформы.
Рис. 3.17. Опорная платформа строительной машины
Реализация алгоритма при помощи бортовой системы автоматического управления строительной машины на базе промышленного микроконтроллера позволяет выполнять полностью в автоматическом режиме вывешивание платформы на выносных, выдвижных или откидных гидравлических опорах, ее горизонтирование, поддержание на заданной высоте в горизонтальном положении во время работы машины.
53
54
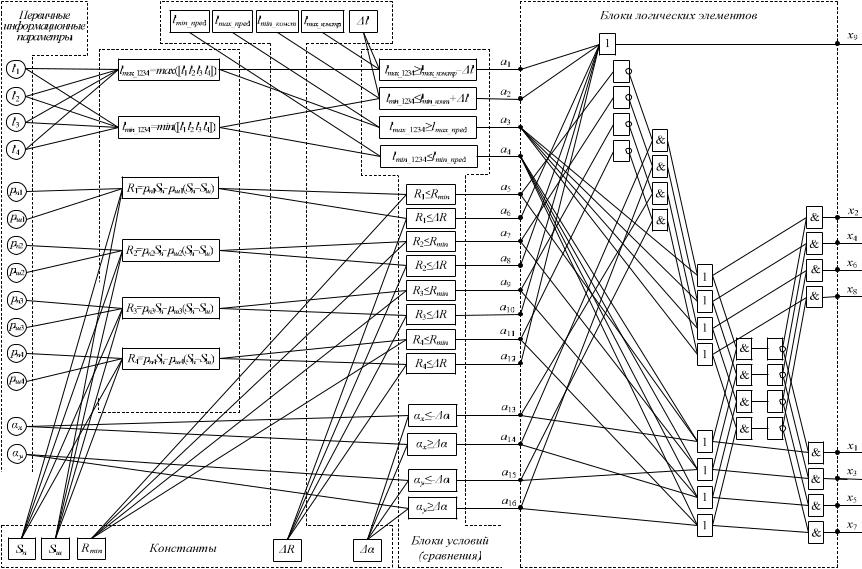
Рис. 3.18. Функциональная схема алгоритма, реализующего процесс управления