Материал: 2334
Рис. 3.1. Определение критерия эффективности
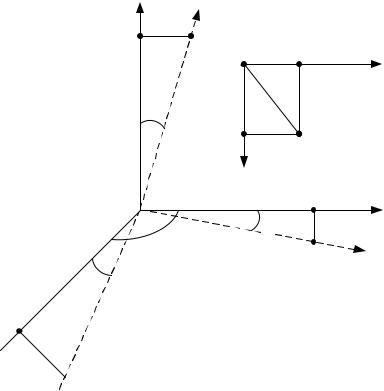
На рис. 3.1 схематично показана платформа строительной машины, которая имеет наклон по осям X и Y. Векторная сумма углов наклона αx и αy будет образовывать результирующий угол наклона αz (рис. 3.2). Согласно требованиям безопасности наклон платформы в горизонтальной плоскости для большинства строительных машины должен составлять αz ≤ 3° [34, 35].
Рассмотрим расчетную схему OB, представленную на рис. 3.2:
|
|
OBx OBy |
Obz a; |
|
|
|
|
|
|
(3.3) |
|||||||
|
|
|
|
|
AxBx tg x a; |
|
|
|
|
|
|
(3.4) |
|||||
|
|
|
|
AyBy tg y a; |
|
|
|
|
|
|
(3.5) |
||||||
|
|
|
z |
arctg |
AzBz |
; |
|
|
|
|
|
|
(3.6) |
||||
|
|
|
|
|
|
|
|
|
|||||||||
|
2 A B |
|
2 A B |
2 |
a |
|
|
|
|
|
|
|
|||||
A B |
|
2 A B |
x |
A B |
y |
cos . |
(3.7) |
||||||||||
z |
z |
|
x |
x |
y |
y |
|
x |
y |
|
|
|
|||||
Подставим в формулу (3.6) формулы (3.4), (3.5) и (3.7): |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
z arctg |
|
tg2 x |
tg2 y |
2 tg x tg y cos ; |
(3.8) |
||||||||||||
|
z |
|
|
|
|
|
. |
|
|
(3.9) |
|||||||
|
|
x |
y |
2 x y cos |
|
|
|||||||||||
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
||
Z |
Z’ |
|
|
Bz |
Az |
Ay |
|
|
Z |
|
|
|
|
Y |
|
|
|
|
|
αz |
|
|
|
|
Ax |
Az |
|
|
|
|
|
|
|
X |
|
|
|
By |
|
О |
|
αy |
Y |
γ |
|
Ay |
Y’ |
|
|
αx
Bx
 X
X
 Ax
Ax
 X'
X'
Рис. 3.2. Расчетная схема для нахождения αz
Основным требованием к устройству управления платформой строительной машины является точность и быстродействие устройства управления. Таким образом, в качестве критерия эффективности было принято быстродействие устройства управления при обеспечении заданной точности:
tпп → min |
(3.10) |
при |
|
αz ≤ αzзад. |
(3.11) |
Также необходимо учитывать ограничения, налагаемые на систему управления:
1. Сила нормальной реакции на i-й опоре Ri ≥ Rmin:
Ri = pпi Sпi – pшi (Sпi – Sшi), |
(3.12) |
где pпi и pшi – давление в поршневой и штоковой полостях гидроцилиндра i-й опоры; Sпi, Sшi – площади поршневой и штоковой полостей гидроцилиндра i-й опоры; Rmin – минимальное предельное значение силы реакции на любой из опор (порядка 10 % от расчетной доли веса платформы, приходящейся на один гидроцилиндр) [17].
41
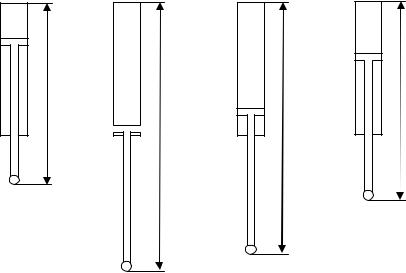
2. Длина i-й опоры Lmin пред ≤ Li ≤ Lmax пред.
|
|
|
Lmax пред |
|
Lmin пред |
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|||
|
|
|
Lmax констр
Lmin конт
Рис. 3.3. Длины гидравлических опор
На рис. 3.3 схематично показаны положения штока гидроцилиндра опоры: Lmin конт – минимальная длина отдельной гидравлической опоры, при которой обеспечивается условие отсутствия касания грунта пневматическими ходовыми элементами машины; Lmax констр – максимальная длина отдельной гидравлической опоры, при которой шток выдвинут на максимально допустимую конструкцией гидроцилиндра длину; Lmin пред – минимальная предельно допустимая длина отдельной опоры в рабочем режиме машины; Lmax пред – максимальная предельно допустимая длина отдельной опоры в рабочем режиме машины [23, 24, 25].
3.2. Структурная схема процесса управления положением платформы строительной машины
На рис. 3.4 представлена блок-схема процесса управления положением платформы строительной машины [10, 11, 29]. Основным элементом системы является устройство управления (УУ). Для включения системы человек-оператор подает управляющий сигнал U1 на УУ.
УУ получает также сигналы U18…U19 с датчиков угла наклона (креномера), которые пропорциональны углам наклона платформы αx, αy по двум плоскостям.
42
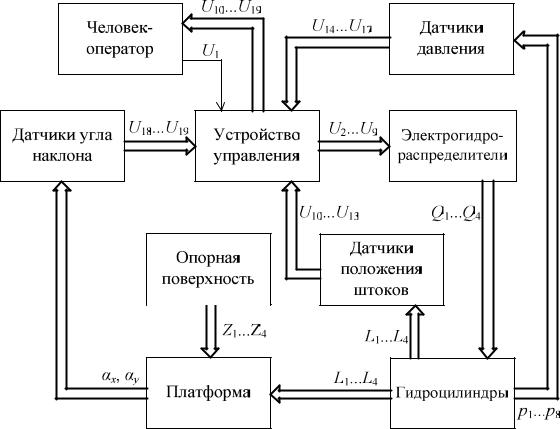
Рис. 3.4. Блок-схема процесса управления положением платформы строительной машины
Дополнительно на УУ поступают сигналы U10…U13 с датчиков длины выдвижных опор, эти сигналы пропорциональны положению штоков L1...L4 гидроцилиндров аутригеров. УУ формирует управляющие сигналы U2…U9 для электрогидрораспределителей, которые управляют положением штоков гидроцилиндров аутригеров. В зависимости от положения аутригеров изменяются углы наклона платформы в горизонтальной плоскости.
Всистеме также присутствуют датчики давления, они выдают сигналы U14…U17 для УУ, эти сигналы пропорциональны разности давлений в поршневой и штоковой полостях гидроцилиндров аутригеров. Данная информация позволяет судить о степени нагружения каждого из четырех аутригеров и при возникновении аварийной ситуации УУ остановит работу строительной машины.
Вкабине человека-оператора установлен дисплей-индикатор, на котором отображается информация о текущем состоянии платформы строительной машины. Опорная поверхность характеризуется высотой неровностей под выносными опорами. Предложенная блок-схема процесса управления положением платформы строительной машины
43
необходима для решения задач анализа и синтеза автоматизированных систем горизонтирования платформ строительных и дорожных машин [10, 11, 29].
3.3. Обоснование информационных параметров процесса управления положением платформы строительной машины
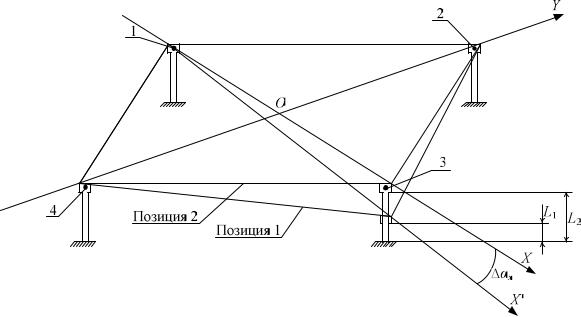
Основные параметры, необходимые для работы системы управления положением платформы, – это углы наклона по диагональным осям платформы к горизонту αx и αy. Эти углы задаются нормами безопасности при работе строительной машины [10, 11]. В процессе установки платформы изменяется длина гидравлических опор, что приводит к изменению углов наклона платформы. На рис. 3.5 схематично показана платформа строительной машины.
Цифрами 1, 2, 3, 4 показаны гидравлические опоры платформы (аутригеры); X, X′ и Y – диагональные оси, по которым измеряются углы наклона платформы относительно горизонта; L1 – начальная длина аутригера 3; L2 – конечная длина аутригера 3; αx – изменение угла наклона по диагональной оси X. При выдвижении штока гидроцилиндра аутригера 3 платформа меняет свое пространственное положение (Позиция 1 → Позиция 2), это приводит к изменению угла наклона по оси X.
Рис. 3.5. Изменение информационного параметра при изменении длины аутригера
44