Материал: 2334
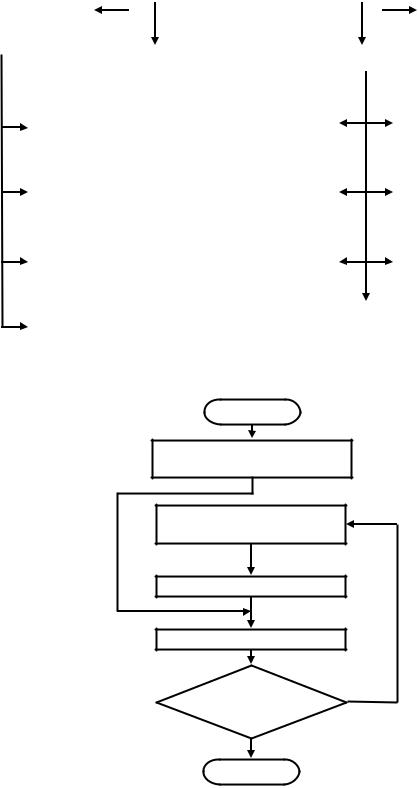
представлена блок-схема алгоритма поиска оптимальных решений для любого метода [6].
Эвристическое |
|
|
|
|
|
|
|
|
|
|
Стохастическое |
|||||||
|
|
|
Методыоптимизации |
|
|
|||||||||||||
программирование |
|
|
|
|
|
|
|
программирование |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналитическиеметоды |
|
|
|
Численныеметоды |
|
|
||||||||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциальное |
|
|
Линейное |
|
|
|
Нелинейное |
|
||||||||
|
|
исчисление |
|
|
программирование |
|
|
программирование |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вариационное |
|
|
|
Динамическое |
|
|
Геометрическое |
|
||||||||
|
|
исчисление |
|
|
|
программирование |
|
|
программирование |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Множители |
|
|
|
|
Регулярный |
|
|
|
Случайный |
|
||||||
|
|
Лагранжа |
|
|
|
поиск |
|
|
|
поиск |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принцип |
|
|
|
|
|
|
|
Дискретныйпринцип |
|
|
||||||
|
|
Понтрягина |
|
|
|
|
|
максимума |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.9. Классификация методов оптимизации
Начало
Выбор начальной точки оптимизации X0
Определение направления поиска
Шаг поиска
Вычисление Z(X)
ОптимумZ(X) Нет найден?
Да
Останов
Рис. 1.10. Блок-схема алгоритма поиска оптимальных решений
35
Таким образом, проведенный обзор и анализ методов автоматизации проектирования позволил представить методы, средства и подходы к созданию САПР основных параметров устройства управления положением платформы строительной машины.
2. ОБЩАЯ МЕТОДИКА ИССЛЕДОВАНИЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
2.1. Методика теоретических исследований системы управления положением платформы строительной машины
Системный подход является общепринятым направлением методологии, определяющим ориентацию научных исследований, и занимает ведущее место в научном познании. В связи с этим в данной работе системный подход использовался в качестве общей методики теоретических исследований системы управления положением платформы строительной машины [3].
Суть системного подхода состоит в том, что система управления положением платформы строительной машины рассматривается как ограниченное множество элементов, объединенных в единое целое связями. Группы элементов, объединенных одним функционально завершенным агрегатом, будут являться подсистемами. Целостность системы управления положением платформы строительной машины заключается в том, что ее свойства не могут быть поняты и оценены без знания свойств ее подсистем. Иерархичность и структурность системы характеризуется тем, что каждая ее подсистема может рассматриваться, в свою очередь, как система с возможностью ее описания с помощью сети связей. Множество моделей, которыми может быть описана система по различным аспектам, является одним из основных принципов системного подхода. Принцип взаимозависимости определяет рассмотрение свойств системы во взаимосвязи с окружающей средой [3].
Решение задач работы с применением системного анализа представлено следующими этапами [3]:
1) постановка задачи: определение объекта и предмета исследования; определение критерия эффективности для процесса управления положением платформы строительной машины;
36
2)решение поставленных задач: определение структуры процесса управления положением платформы строительной машины; разбиение системы управления положением платформы строительной машины на подсистемы; составление математических моделей подсистем и общей модели системы управления положением платформы строительной машины;
3)анализ системы: обоснование параметров устройства управления положением платформы строительной машины, влияющих на критерий эффективности, и их границ; анализ полученной математической модели сложной динамической системы управления положением платформы строительной машины; получение численных зависимостей эффективности основных параметров устройства управления положением платформы строительной машины;
4)синтез системы: выявление функциональных зависимостей критерия эффективности от основных параметров устройства управления положением платформы строительной машины; оптимизация основных параметров устройства управления положением платформы строительной машины согласно целевой функции выбранного критерия эффективности; составление инженерной методики расчета оптимальных значений параметров и САПР основных параметров устройства управления положением платформы строительной машины.
Математическое моделирование составляет основу теоретических исследований работы, при этом исследуемый объект заменяется его математической моделью, которая отражает с достаточной степенью точности исследуемые свойства объекта.
Составление математической модели проведено путем широко распространенного описания подсистем – при помощи передаточных
истатистических функций, а также дифференциальных уравнений, описывающих исследуемые свойства объекта [3].
Математическое моделирование сложной динамической системы управления положением платформы строительной машины проведено на ПЭВМ с процессором Intel Core Duo 1,50 ГГц с объемом ОЗУ 1 ГБ в программном комплексе MATLAB R2009a [4, 27]. Такой способ имеет ряд преимуществ перед натурными испытаниями: дешевизна исследований; вмешательство извне на любой стадии исследований; возможность моделирования условий эксперимента, которые невозможно воспроизвести в реальных условиях.
При составлении математической модели системы управления положением платформы строительной машины в данной работе рассматривалась сложная динамическая система, на которую действуют
37
как управляющие, так и возмущающие воздействия, имеющие стохастическую природу. Параметры гидропривода также изменяются во времени, но эти изменения несоизмеримо малы по сравнению с изменениями внешних воздействий, поэтому при моделировании подсистемы гидропривода он представлен системой с фиксированными параметрами [3, 21].
2.2. Методика экспериментальных исследований
Комплексный метод исследований предполагает проведение экспериментальных исследований, основными задачами которых являются: подтверждение адекватности математической модели объекта исследования; определение численных значений параметров, входящих в математические модели объекта; подтверждение работоспособности и эффективности технического решения, внедренного в производство [21].
В настоящее время представленные в данной работе механические подсистемы, например, гидропривод, достаточно хорошо изучены и математически описаны. Предшествующими исследователями проведено множество экспериментальных исследований, в результате которых накоплена огромная масса эмпирических данных, что позволяет принять имеющийся математический аппарат.
Предлагаемая математическая модель системы управления положением платформы строительной машины имеет новизну и требует подтверждения своей адекватности. Процесс подтверждения адекватности можно представить следующей последовательностью действий:
1.Проведение натурного эксперимента с целью получения массива экспериментальных данных.
2.Проведение машинного эксперимента при необходимых параметрах и условиях с целью получения теоретических данных.
3.Оценка адекватности математической модели путем сравнения экспериментальных и теоретических данных.
При проведении экспериментальных исследований возможно использование двух методов: активного и пассивного [21].
Пассивный эксперимент предусматривает наблюдение за выходными координатами без вмешательства в процесс функционирования системы. Результаты пассивного эксперимента используются для подтверждения адекватности математических моделей, проверки работоспособности конструкторских разработок, определения эффек-
38
тивности предложенных инженерных решений [21]. Активный эксперимент предусматривает формирование детерминированных воздействий на подсистемы и сложную динамическую систему в целом. Выходные координаты и переходные процессы дают информацию о свойствах объекта [21]. В данной работе целесообразно использовать методологию пассивного эксперимента, в силу того что внешние возмущающие воздействия имеют постоянную природу, а при подтверждении адекватности модели целесообразно формировать постоянное воздействие.
Таким образом, проведенный натурный эксперимент будет служить доказательством части представленной математической модели процесса управления положением платформы строительной машины.
3. РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ УСТРОЙСТВА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
Проведение теоретических исследований вновь создаваемой техники невозможно без математического моделирования исследуемого объекта. В настоящее время широко распространено представление математических моделей в виде системы каких-либо уравнений (общих дифференциальных, частных дифференциальных, алгебраических и др.), которые с достаточной степенью точности отражают исследуемые свойства объекта [20].
3.1. Обоснование критерия эффективности процесса управления положением платформы строительной машины
Для правильной и безопасной работы строительной машины необходимо выдерживать платформу в горизонтальном положении. Допустимые отклонения угла наклона платформы к горизонту определены в требованиях безопасностипри работе строительной машины[34,35].
x |
xдоп; |
(3.1) |
y |
yдоп, |
(3.2) |
где αx и αy – фактические углы наклона платформы к горизонту по осям X и Y; αxдоп и αyдоп – максимально допустимые углы наклона платформы к горизонту по осям X и Y.
39