Материал: 2334
|
|
|
|
|
|
1 |
|
dц |
|
||
2 |
2 |
|
|
|
|||||||
kш Vш 0,25 Sш max |
Sш |
dц dш |
|
E |
ж |
ц |
E |
, (3.51) |
|||
|
|
|
|
|
|
|
|
ц |
|||
где Vш – «мертвый» объем |
штоковой |
полости |
гидроцилиндра; |
||||||||
S’ш max – длина штока гидроцилиндра. |
|
|
|
|
|
|
|
|
|
|
|
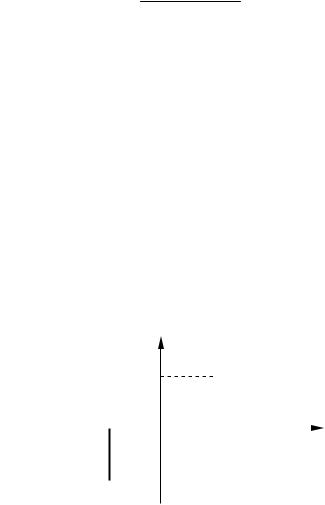
Рис. 3.28. Структурная схема гидроцилиндра |
|
|
|
||||||||
Знак скорости движения штока гидроцилиндра при его выдвижении положителен, что соответствует выдвижению опоры. При втягивании штока знак скорости отрицателен, что соответствует поднятию опоры. Уравнения (3.47) – (3.51) позволяют представить гидроцилиндр в виде структурной схемы. Структурная схема гидроцилиндра представлена на рис. 3.28. Значения коэффициентов передачи:
kгц1 0,25 dц2 dш2 ; |
(3.52) |
kгц2 0,25 dц2; |
(3.53) |
70
kгц3 4 ( dц2); (3.54)
( dц2); (3.54)
|
4 |
(3.55) |
|
kгц4 |
dц2 dш2 . |
||
|
Структурная схема гидроцилиндра состоит из двух частей: верхняя соответствует выдвижению штока гидроцилиндра при xзол > xзол1, а нижняя часть соответствует втягиванию штока гидроцилиндра при xзол < xзол2. Переключение ветвей структурной схемы осуществляется сигналом управления xупр:
1 при xзол xзол1;
xупр 0 при xзол2 xзол xзол1; (3.56)1 при xзол xзол2.
На рис. 3.29 представлена зависимость перемещения золотника от сигнала управления xупр гидрораспределителем.
xупр |
|
|
|
1 |
|
|
xзол |
|
|
||
xзол2 |
|
|
|
0 |
xзол1 |
||
 –1
–1
Рис. 3.29. Сигнал управления переключением линии структурной схемы гидроцилиндра
Электрогидравлические распределители достаточно хорошо изучены и имеют различные математические модели, которые зависят от принятых при их описании допущений [1, 2, 15, 26].
Принятые в работе допущения позволяют принять динамическую модель электрогидравлического распределителя, предложенную в ра-
ботах [1, 2, 15, 26]:
m |
зол |
|
d2x |
зол |
c |
|
|
dx |
зол |
c |
|
x |
зол |
c |
i |
расп |
, |
(3.57) |
dt2 |
|
dt |
|
|||||||||||||||
|
|
|
2 |
|
|
3 |
|
1 |
|
|
|
|||||||
где c1 – линеаризованный коэффициент пропорциональности между током в обмотках электромагнита и силой тяги электромагнита; с2 – коэффициент вязкого трения в золотнике; с3 – коэффициент упругой
71

деформации пружин, удерживающих золотник в нейтральном положении; mзол – масса сердечника электромагнита и золотника.
xзол min xзол xзол max . |
(3.58) |
Передаточная функция электрогидравлического распределителя с учетом запаздывания [1, 2, 15, 26]:
|
|
p |
x |
зол |
p |
|
|
k e τзол p |
|
|
|
|||
W |
|
|
|
|
|
|
|
1 |
|
|
, |
(3.59) |
||
зол |
i |
|
|
p |
T2 |
p2 T |
|
|
||||||
|
|
расп |
|
зол2 |
p 1 |
|
||||||||
|
|
|
|
|
|
|
зол1 |
|
|
|
|
|||
где k1 – коэффициент усиления; Тзол1 и Тзол2 – постоянные времени; зол
– время запаздывания электрогидравлического распределителя.
k1 c1 c3 ; |
|
(3.60) |
||
Т2 |
m |
зол |
c ; |
(3.61) |
зол1 |
|
3 |
(3.62) |
|
Tзол2 c2 |
c3 . |
|||
Гидрораспределитель представляет собой сочетание местных сопротивлений, образованных каналами золотника. Математическое описание гидрораспределителя сводится к рассмотрению двух расчетных положений, отражающих процесс втягивания и выдвижения штока. Уравнение расходов и давлений для открытых гидросистем [1, 2, 15, 26]:
Q |
μ |
б |
f |
б |
|
2 1 |
р |
л |
, |
(3.63) |
б |
|
|
|
ж |
|
|
|
где Qб – расход рабочей жидкости через гидролинию разгрузки насоса; μб – коэффициент расхода в гидролинии разгрузки насоса; fб – площадь проходного сечения местных сопротивлений в гидролинии разгрузки насоса.
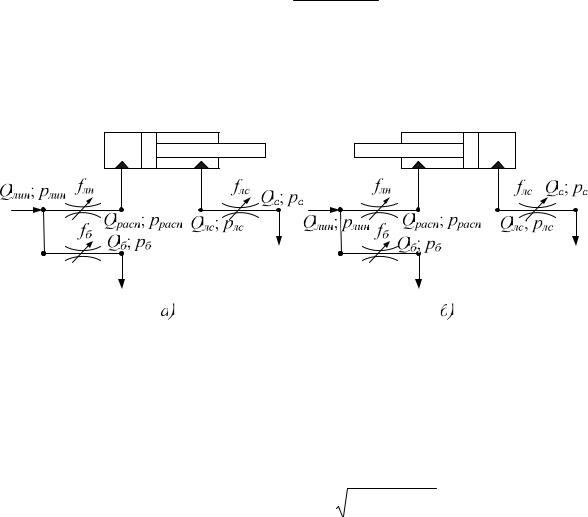
На рис. 3.30 представлены расчетные положения гидрораспределителя, соответствующие втягиванию и выдвижению штока гидроцилиндра.
Qрасп Qлин Qб; |
(3.64) |
рлин ррасп ррасп, |
(3.65) |
где рpасп – перепад давления на выходе из гидрораспределителя.
72
рpасп |
ж Qp2асп |
, |
(3.66) |
2 лн2 fлн2 |
где μлн – коэффициент расхода на входе в гидрораспределитель; fлн – площадь проходного сечения местных сопротивлений в напорном канале гидрораспределителя.
Рис. 3.30. Расчетные положения гидрораспределителя, соответствующие: а – выдвижению штока гидроцилиндра; б – втягиванию штока
Давление в сливном канале гидрораспределителя открытой гидросистемы определяется расходом жидкости и площадью проходного сечения местного сопротивления [1, 2, 15, 26]:
Q |
лс |
f |
лс |
|
2 1 |
р |
лс |
, |
(3.67) |
с |
|
|
ж |
|
|
|
где Qс – расход рабочей жидкости через сливной канал гидрораспределителя; μлс – коэффициент расхода в сливном канале гидрораспределителя; fлс – площадь проходного сечения местных сопротивлений в сливном канале гидрораспределителя;
рлс рс рлс, |
(3.68) |
где рлс – перепад давления на выходе из гидрораспределителя;
|
|
|
ж |
Q2 |
|
|
||
рлс |
|
|
|
лс |
, |
(3.69) |
||
2 лс2 |
fлс2 |
|||||||
|
|
|
|
|||||
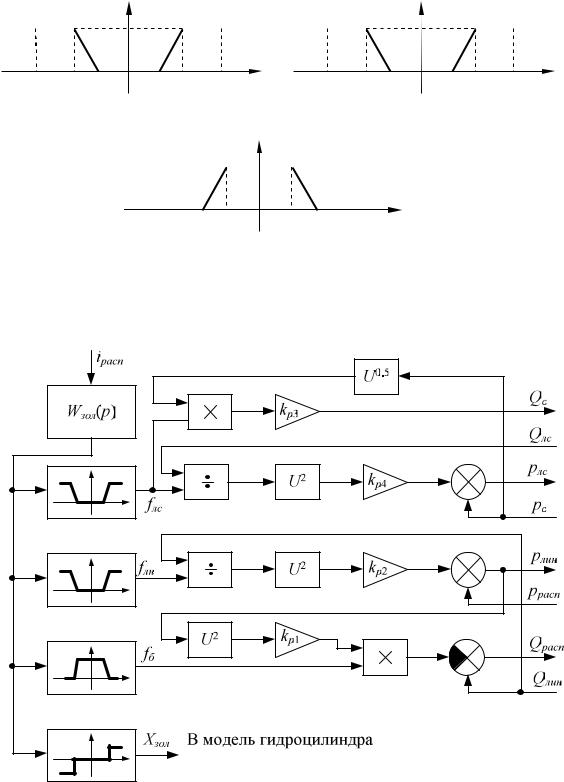
где μлс – коэффициент расхода на выходе из гидрораспределителя. Площади проходных сечений каналов золотника зависят от по-
ложения золотников и представлены трапецеидальными зависимостями на рис. 3.31.
73
|
|
|
|
fлн |
fлн max |
|
|
|
|
|
|
|
|
|
|
|
|
|
fлс |
fлс max |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
0 |
|
|
|
|
|
|
|
|
xзол |
|
|
|
|
|
0 |
|
|
|
|
|
|
xзол |
|||||
xзол min |
|
x |
зол2 |
|
|
xзол |
1 |
xзол max |
|
|
|
xзол min |
x |
зол2 |
|
|
xзол |
1 |
|
xзол max |
|||||||||
|
|
xзол4 |
|
xзол3 |
|
|
|
|
|
xзол4 |
|
б) |
|
xзол3 |
|
|
|||||||||||||
|
|
|
|
а) |
|
|
|
|
|
fб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
fб max |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
xзол |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
xзол |
min |
|
xзол2 |
|
xзол1 |
|
|
xзол |
max |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
xзол4 |
|
|
|
xзол3 |
|
|
|
|
|
|
|
|
|
|||||||
в)
Рис. 3.31. Площади проходных сечений каналов золотника, соответствующие: а – напорному каналу; б – сливному каналу; в – перепускному каналу
Рис. 3.32. Структурная схема электрогидравлического распределителя
Выражения (3.56) – (3.69) и представленные на рис. 3.32 графические зависимости площадей проходных сечений каналов золотника
74