Материал: 2332
Параметры, характеризующие рассматриваемую динамическую систему: m – масса машины; kf – приведенный коэффициент жесткости амортизаторов двух передних колес автомобиля; cf – приведенный коэффициент вязкого трения амортизаторов двух передних колес автомобиля; kr – приведенный коэффициент жесткости амортизаторов двух задних колес
Сно равновесного положен я амортизаторов; lf – постоянный конструктивно заданный л нейный размер расстояния от центра масс до оси передних колес; lr – постоянный конструктивно заданный линейный размер расстояния от центра масс до оси задних колес; V – скорость движения транспортного средства.
автомобиля; cr – приведенный коэффициент вязкого трения амортизаторов двух задних колес автомобиля; θ – угол наклона шасси автомобиля относительно равновесного горизонтального положения (угол поворота вокруг
оси O0Y0); z – верт кальное смещение центра масс автомобиля относитель-
Указанные параметры принимали следующие значения по умолча- : m=1 200 кг; kf=28 000 Н/м; cf= 250 Н∙с/м; kr=21 000 Н/м; cr= 200 Н∙с/м;
θ=0 рад; z=0 м; lf=0,9 м; lr= 1,2 м; V=20 км/ч. |
|
||||||||||||||||
нию |
|
|
|
|
|
|
|
|
|||||||||
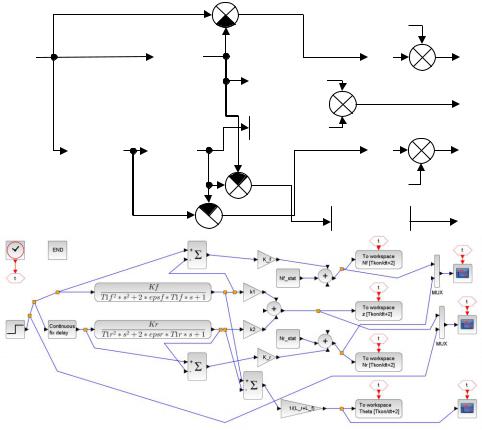
На р с. 2.2 пр ведены составленные по расчетной схеме функцио- |
|||||||||||||||||
нальная схема (р с. 2.2, а) и |
лочная диаграмма модели динамической сис- |
||||||||||||||||
темы подвески легкового автомо иля в обозначениях Xcos (рис. 2.2, б). |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nf стат |
Nf |
||
|
h |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Wf |
|
|
|
|
|
kf |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
k1=lr/(lf+lr) |
|
|
|
|
|
z |
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бА |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
k2=lf/(lf+lr) |
|
|
|
|
|
Nr |
|
|
|
e p зап |
|
|
|
|
Wr |
|
|
|
|
|
|
kr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nr стат |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ |
|
|
|
|
|
|
|
|
|
|
|
|
|
kθ=1/(lf+lr) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Д |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
И |
||||||
б
Рис. 2.2. Функциональная схема (а) и блочная диаграмма модели динамической системы подвески легкового автомобиля в обозначениях Xcos (б)
16

Файл Автомобильная подвеска.zcos модели, блочная диаграмма которой приведена на рис. 2.2, б, запускается при помощи файла скрипта
(текстовой программы) Avto_podveska_zapusk.sce.
В математической модели присутствует также ряд задаваемых до начала моделирования вспомогательных параметров, определяющих процесс моделирования и внешние воздействия на динамическую систему подвески легкового автомобиля. Это dt=0,01 с – шаг времени сохранения результатов; Tkon=10 с – конечное время моделирования; StepTime_h= 5 с – время начала ступенчатого воздействия от неровности дороги; h=0,1 м – высота неровности дороги. Пр ведены значения по умолчанию.
Л ст нг программы «Avto_podveska_zapusk.sce» приведен ниже.
|
clear L f L r M b K f K r C f C_r dt Tkon StepTime_h StepValue_h Theta z |
|
|
С |
|
|
|
|
Ampz Nmin |
|
|
|
clc |
|
|
|
L f = 0.9; // Передняя ступица, смещение вдоль горизонтали от центра |
|
|
|
тяжести маш ны (м) |
|
|
|
Lиr = 1.2; // Задняя ступ ца, смещение вдоль горизонтали от центра тя- |
|
|
|
жести маш ны (м) |
|
|
|
M_b = 1200; // Масса машины (кг) |
|
|
|
K_f = 28000; // Передняя подвеска, коэф-т жесткости (Н / м) |
|
|
|
K_r = 21000; // Задняя подвеска, коэф-т жесткости (Н / м) |
|
|
|
C_f = 250; // Передняя подвеска, коэф-т демпфирования (N.sec / м) |
|
|
|
C_r = 200; // Задняя подвеска, коэф-т демпфирования (N.sec / м) |
|
|
|
dt=0.01; // Шаг времени сохранения результатов |
|
|
|
Tkon=10; // Конечное время моделирования |
|
|
|
StepTime_h=бА5; // Время ступенчатого воздействия от неровности дороги |
|
|
|
StepValue_h=0.1; // Высота неровности дороги |
|
|
|
V=20; // Скорость движения транспортного средства (км/ч) |
|
|
|
tzap=(L_f+L_r)/(V*1000/3600); |
Д |
|
|
k1=L_r/(L_f+L_r); |
|
|
|
k2=L_f/(L_f+L_r); |
|
|
|
Nf_stat=k1*M_b*9.81; |
И |
|
|
Nr_stat=k2*M_b*9.81; |
|
|
|
mf=k1*M_b; |
|
|
|
mr=k2*M_b; |
|
|
|
Kf=1; |
|
|
|
T1f=mf/K_f; |
|
|
|
T2f=C_f/K_f; |
|
|
|
epsf=T2f/(2*T1f); |
|
|
|
Kr=1; |
|
|
|
T1r=mr/K_r; |
|
|
|
T2r=C_r/K_r; |
|
|
|
epsr=T2r/(2*T1r); |
|
|
17
|
xcos("D:\Автомобильная подвеска.zcos") |
|
|
|
|
|||||||
|
loadXcosLibs(); loadScicos(); // load the blocks library and the simulation en- |
|
||||||||||
|
gine |
|
|
|
|
|
|
|
|
|
||
|
importXcosDiagram("D:\Автомобильная подвеска.zcos") |
|
|
|||||||||
|
typeof(scs_m) // The diagram data structure |
|
|
|
|
|||||||
С |
|
|
|
|
|
|||||||
|
scicos simulate(scs m); // Динамический расчет - наезд на неровность |
|
||||||||||
|
Ampz=max(z.values)-min(z.values); // Амплитуда вертикальных перемеще- |
|
||||||||||
|
ний центра масс |
|
|
|
|
|
||||||
|
Nmin=min([min(Nf.values) min(Nr.values)]); // Минимальное значение одной |
|
||||||||||
|
из двух нормальных реакц й |
|
|
|
|
|
||||||
|
и |
|
|
|
|
|
||||||
|
|
|
|
h, z, м |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
а |
|
|
|
|
|
|
|
бА |
|
|
||||
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t, с |
|
|
|
0 |
|
|
|
|
|
Д |
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Nf, Nr, Н |
Nf |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
И |
||
|
|
|
|
|
|
|
|
|
|
Nr |
|
|
t, с
0
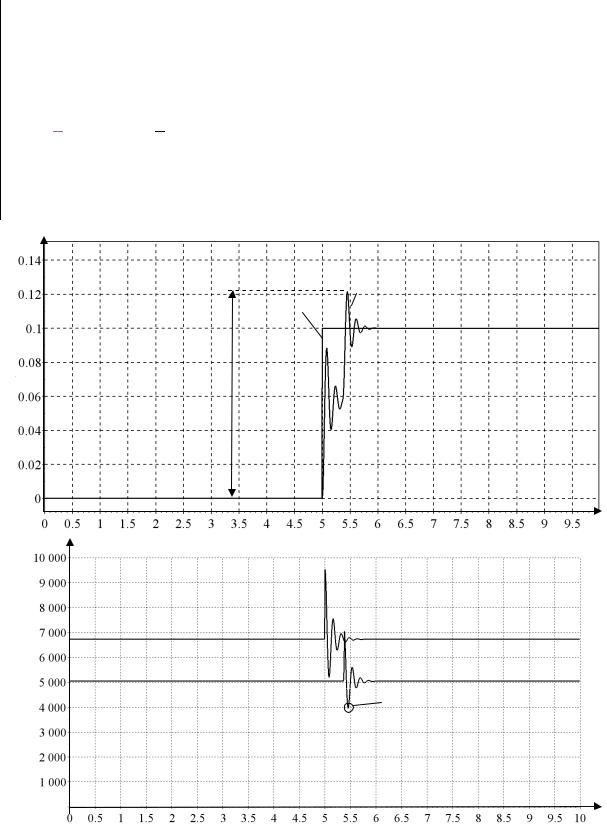
Рис. 2.3. Визуализация некоторых результатов моделирования (пример наезда машины на неровность высотой h = 0,1 м): а – линейное перемещение центра масс;
б – нормальные реакции на ходовых элементах
18

В результате выполнения программы, запускающей модель, последней генерируются временные зависимости ряда выходных переменных, в том числе: нормальных (вертикальных) сил реакций Nf(t) на передней оси, нормальных сил реакций Nr(t) на задней оси, вертикальной координаты центра масс машины z(t), угла наклона шасси автомобиля θ(t), которые визуализируются в графических окнах, а также визуализируются временные зависимости входных воздействий: высоты неровности под ходовыми элементами машины h(t) (рис. 2.3).
На основе значен й z(t) может быть вычислена амплитуда (размах) вертикальных перемещений центра масс машины A как разность между максимальным элементом вектора z и его минимальным элементом. На ос-
нове значен й Nf(t) |
Nr(t) может быть вычислено минимальное значение |
С |
на менее загруженной опоры Nmin, достигаемое во |
нормальной реакц |
|
время переходного процесса. |
|
Программа |
модель могут ыть модифицированы, в частности, воз- |
делированя, спользование циклов для варьирования параметров, вычисление друг х показателей и т.д. Это открывает возможность оптимизации
УпражнениебА1. При различных значениях параметров приведенных коэффициентов жесткости амортизаторов kf=kr, варьируемых в пределах 10 000…100 000 Н/м с шагом 10 000 Н/м (10 точек), проведите для каждой точки (каждого значения kf=kr) моделирование наезда на неровность высо-
можно зменен е значен й лю ых параметров, задаваемых до начала мо-
выходных параметров математической модели и показателей, вычисляемых на их основе, что является необходимым элементом автоматизированного проектирования.
Упражнения для самостоятельной работы
той h.
Высоту неровности дороги Дпримите равной h=0,1 м (переменная StepValue_h), время наезда на неровность StepTime h=5 с, время моделирования Tkon=10 с. Остальные параметры принимают значения по умолча-
нию (см. выше).
Сохраните для каждой точки (kf=kr) значение амплитуды A верти- |
||
кальных перемещений центра масс машины, вычисляемых строкой про- |
||
граммы |
И |
|
Ampz=max(z.values)-min(z.values); // Амплитуда вертикальных перемеще- |
|
|
ний центра масс |
|
|
Визуализируйте для каждой точки (kf=kr) полученные временные зависимости h, z (см. рис. 2.3, а), сохраните результаты визуализации в виде 10 графиков в документе MS Word.
19
Добавьте в документ MS Word графическую зависимость амплитуды вертикальных перемещений центра масс машины A от значений (kf=kr). График A=f(kf) может быть получен при помощи такого ПО, как MS Excel, либо в самом Scilab при помощи команд
K_f=10000:10000:100000; figure;
plot(K f,Ampz)
делайте вывод о том, как и на сколько процентов увеличение коэффициентов жесткости амортизаторов машины влияет на амплитуду верти-
кальных перемещен й центра масс машины A.
Упражнен е 2. При различных значениях параметров приведенных |
|
коэфф ц ентов вязкости амортизаторов cf=cr, варьируемых в пределах |
|
С |
|
100…1000 Н∙с/м с шагом 100 Н∙с/м (10 точек), проведите моделирование |
|
наезда на неровность |
. Высоту неровности дороги примите равной |
h=0,1 м (переменная |
StepValue h), время наезда на неровность |
StepTime h=5 с, время моделирования Tkon=10 с. |
|
ных перемещен й центра масс машины, вычисляемых строкой программы
Ampz=max(z.values)-min(z.values); // мплитуда вертикальных перемеще-
ний центра масс
Визуализируйте для каждой точки (cf=cr) полученные временные зависимости h, z (см. рис. 2.3, а), сохраните результаты визуализации в виде
10 графиков в документе MS Word.
дороги СохранбАте для каждой точки (cf=cr) значение амплитуды A вертикаль-
Добавьте в документ MS Word графическую зависимость амплитуды вертикальных перемещений центра масс машины A от значений (cf=cr). График A=f(cf) может быть получен при помощи такого ПО, как MS Excel,
либо в самом Scilab при помощи команд
C_f=100:100:1000; |
Д |
|
|
figure; |
|
||
plot(C_f,Ampz) |
|
||
Сделайте вывод о том, как и на сколько процентов увеличение коэф- |
|||
фициентов вязкости амортизаторов машины влияет на амплитуду верти- |
|||
кальных перемещений центра масс машины A. |
|
|
|
Упражнение 3. При значениях параметров приведенных коэффици- |
|||
ентов вязкости амортизаторов по умолчанию cf= 250 Н∙с/м; cr= 200 Н∙с/м и |
|||
|
|
И |
|
значениях приведенных коэффициентов жесткости амортизаторов по |
|||
умолчанию kf=28 000 Н/м; kr=21 000 Н/м проведите варьирование значений параметра высоты неровности дороги h (переменная StepValue_h) в пределах 0,01…0,1 м с шагом 0,01 м (10 точек h), т.е. моделирование наезда на неровность дороги. Время наезда на неровность примите равным StepTime_h=5 с, время моделирования Tkon=10 с.
20