Материал: 2332
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
«Сибирский государственный автомобильно-дорожный университет (СибАДИ)»
СибАДИО НОВЫ АВТОМАТИЗИРОВАННОГО
ПРОЕКТИРОВАНИЯ
Ла ораторный практикум
2-е издание, дополненное
Составители: М.С. Корытов, Ю.И. Привалова
Омск • 2019

УДК 681.31(075.8) ББК 32.97
О75
д-р техн. наук,
Согласно 436-ФЗ от 29.12.2010 «О защите детей от информации, причиняющей вред их здоровью и развитию» данная продукция маркировке не подлежит.
Рецензент
доц. А.А. Александров (СибАДИ)
Работа утверждена редакционно-издательским советом СибАДИ в качест- СибАДИве лабораторного практикума.
О75 Основы автомат з рованного проектирования [Электронный ресурс] :
лабораторный практ кум / сост. : М.С. Корытов, Ю.И. Привалова. – Омск : СибАДИ, 2019. – Электрон. дан. – Омск : СибАДИ, 2019. – URL: http://bek.sibadi.org/cgi-bin/ irbis64r plus/cgiirbis 64 ft.exe?C21COM=S&I21DBN=IBIS FULLTEXT&P21DBN= IBIS&S21FMT=briefHTML ft&Z21ID=GUEST&S21ALL=<.>TXT=esd1064.pdf<.>. -
Режим доступа: для автор зованных пользователей.
осто т з сведен й и практических рекомендаций по работе с системой Scilab, предназначенной для выполнения широкого круга инженерных и научных расчетов. В состав с стемы Scilab также входит Xcos – инструмент моделирования с графическ м нтерфейсом (аналог Simulink в пакете MATLAB). Описаны основные принц пы построен я д аграммы Xcos и на конкретных примерах рассмотрена работа базовых блоков, нео ходимых для моделирования наземных транспортнотехнологические комплексов. Рассматриваются основы работы в одной из распространенных САПР КОМПАС-3D, предназначенной для выполнения чертежноконструкторской документации, построения объемных 3D-моделей и сборок. Также рассматриваются основы ра оты в российской С ПР Т-FLEX CAD.
Имеет интерактивное оглавление в виде закладок.
Адресован для обучения бакалавров всех форм обучения по направлениям 23.03.02 «Наземные транспортно-технологические комплексы», 13.03.03 «Энергетическое машиностроение», 15.03.04 « втоматизация технологических процессов и производств» и специалистов по специальности 23.05.01 «Наземные транспортно-технологические средства», изучающих дисциплины, связанные с автоматизированным проектированием и САПР.
Работа подготовлена на кафедре «Автомобили, конструкционные материалы технологии».
Текстовое (символьное) издание (5,5 МБ)
Системные требования: Intel, 3,4 GHz ; 150 МБ ; Windows XP/Vista/7/10 ; DVD-ROM ; 1 ГБ свободного места на жестком диске; программа для чтения pdf-файлов: Adobe Acrobat Reader
Редактор И.Г. Кузнецова Техническая подготовка Н.В. Кенжалинова
Издание второе, дополненное. Дата подписания к использованию 04.07.2019 Издательско-полиграфический комплекс СибАДИ. 644080, г. Омск, пр. Мира, 5 РИО ИПК СибАДИ. 644080, г. Омск, ул. 2-я Поселковая, 1
© ФГБОУ ВО «СибАДИ», 2019
ВВЕДЕНИЕ
Проектирование машин и их комплексов – это динамический многоэтапный процесс. Автоматизировать различные по содержанию и назначению вычислительные, чертежные и другие виды работ, входящих в процесс проектирования, позволит знание соответствующего программного
СибАДИобеспечения систем автоматизированного проектирования. Специалист должен хорошо разбираться и ориентироваться также в области математического модел рован я, т.е. обладать навыками постановки и формализации задачи, уметь анал зировать и обрабатывать входную и выходную информац ю об объекте, процессе или системе. Необходимым этапом проектирован я является также формирование совокупности параметрических двухмерных трехмерных геометрических моделей изделия, создание конструкторско-технолог ческой документации на изделие. Решению данных задач в программных продуктах Scilab, КОМПАС-3D и T-FLEX CAD и посвящен практ кум по курсу «Основы автоматизированного проектирования».
Ла ораторная работа № 1
ОСНОВЫ ВИЗУАЛЬНОГО МОДЕЛИРОВ НИЯ В ПРИЛОЖЕНИИ
XCOS СИСТЕМЫ SCILAB
Цели лабораторной работы – ознакомление с инструментом визуального моделирования Xcos системы Scilab, приобретение практических навыков составления математических моделей объектов и визуализации результатов моделирования в Xcos / Scilab.
Знакомство с интерфейсом Xcos
Свободно распространяемый программный продукт Scilab впервые разработан в 1994 г. во Франции, в Национальном исследовательском институте информатики автоматизации INRIA и Национальной школе дорожного ведомства ENPC. С 2003 г. ПО Scilab поддерживается Scilab Consortium.
Xcos (название первых версий Scicos, от «Scilab Connected Object Simulator») – это часть системы Scilab. Xcos позволяет осуществлять визуальное математическое моделирование динамических систем различных объектов. Моделируемые объекты могут описываться как непрерывные и как дискретные. Система Scilab воспринимает модель Xcos как функцию, что позволяет осуществлять интеграцию моделей Xcos в программы Scilab [1, 2, 3, 4].
3
Сравнение с подходами к моделированию, основанными на традиционных языках программирования, показало, что использование Scilab/Xcos при незначительном увеличении длительности расчетов позволяет существенно сократить время на разработку модели. Это дает возможность рекомендовать Scilab/Xcos как средство для прототипирования.
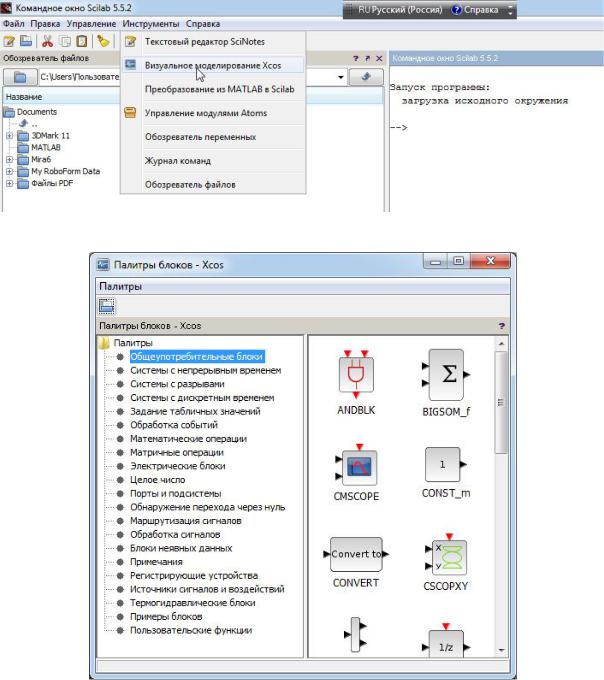
Си Р сбА. 1.1. Фрагмент командного окна Scilab в момент запуска Xcos
Д И
Рис. 1.2. Палитры блоков
Для вызова Xcos необходимо набрать «xcos» в командной строке главного окна Scilab или выбрать «Визуальное моделирование Xcos» в меню главного окна Инструменты (рис. 1.1). При этом откроются два окна:
4
окно палитр блоков Xcos и окна моделей (блочных диаграмм), которые были открыты при закрытии главного окна Scilab, либо новое пустое окно модели в случае, если при закрытии главного окна Scilab окна моделей уже были закрыты. Каждый блок Xcos находится в своей палитре в окне палитр блоков Xcos.
Сблок к д аграмме, а также вызвать справку по блоку (на английском языке). Также возможно добавление блока на диаграмму простым перетаскиванием при нажатой левой кнопке мыши.
Любая блочная диаграмма Xcos строится из блоков, находящихся в окне Палитры блоков. Блоки в окне Палитры блоков объединены в
группы или отдельные палитры (рис. 1.2).
При помощи щелчка правой кнопкой мыши на изображении любого блока вызывается контекстное меню, которое позволяет добавить текущий
иметьрегулярные управляющие входы и выходы. Регулярные входы и выходы блоков располагаются слева и справа, а управляющие – сверху и снизу относ тельно лока.
Д аграммы Xcos содержат два типа соединений: регулярные (чер-
ные) управляющ е (красные). По регулярным соединениям передаются сигналы данных, а по управляющим – сигналы активации. Блоки могут
БлокибАсоединяются друг с другом при помощи линий, создаваемых щелчком левой кнопкой мыши на выходе одного блока и перемещением указателя мыши при нажатой левой кнопке на вход другого блока. Обратите внимание на то, что соединяться линиями могут только блоки с выходами и входами одного цвета (черного с черным и красного с красным). Разрешенные к соединению входы и Двыходы при наведении курсора мыши подсвечиваются зеленым цветом.
Назначение некоторых наиболее широко употребляемых блоков описано ниже.
CLOCK_c – часы активации. Устанавливается шаг работы и время начала работы. И
CONST_m, CONST_f, CONST – константа (постоянное значение сигнала).
GENSIN_f – генератор синусоидального сигнала.
RAND_m – генератор равномерно распределенных случайных чисел в диапазоне 0…1.
RAMP – блок генерации равномерно нарастающего сигнала. STEP_FUNCTION – генератор ступенчатого сигнала.
TIME_f – время. Установок блока нет. Линейно нарастающий сигнал. Крутизна равна единице.
DERIV – непрерывный блок производной. Она вычисляется по входному сигналу u/Δt.
5