Материал: 2332
Упражнения для самостоятельной работы
Моделирование технических систем, описываемых отдельными алгебраическими уравнениями
Используя блоки Xcos, создайте блочные диаграммы для алгебраических уравнений и выполните моделирование до указанного значения конечного времени (табл. 1.1).
Таблица 1.1. Исходные данные для моделирования алгебраических уравнений
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
и |
|
|
|
|
2 |
|
|
|
|
Конечное время |
||||
|
Номер |
|
Уравнение |
|
|
|
|
|
|
|
|
||||
|
упражнен я |
|
|
|
|
|
|
|
|
|
|
|
|
моделирования, с |
|
С |
|
|
|
|
|
|
|
|
|
||||||
|
1 |
y=2∙(sin(t))2–sin(t)+1 |
|
|
|
|
|
|
10 |
||||||
2 |
|
y |
|
1 0,5 sin(2 t) |
|
|
|
|
15 |
||||||
|
3 |
|
y t e t2 |
cos(2 t) |
|
|
|
|
18 |
||||||
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
y 3,5 0,3 t 0,06 t |
2 |
|
|
e |
2t |
t |
||||||||
|
|
|
|
|
|
|
|||||||||
5 |
|
y min(5 t,100 2 t |
|
|
) |
|
|
|
19 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
6 |
|
y |
|
100 20 t |
|
|
|
|
|
|
27 |
||||
констант) можетбАбыть задано выражением «%pi», а экспонента (ex) – при помощи блока EXPBLK m с основанием степени, заданным по умолчанию как «%e».
Визуализируйте результаты моделирования, используя в диаграммах блок CSCOPE. Нео ходимо установить значение параметра Refresh period
блока CSCOPE равным или ольшим времени моделирования.
Число π в полях настройки параметров различных блоков (например, Д
Для каждого уравнения необходимо составить отдельную диаграмму, запустить ее на выполнение и скопировать окно диаграммы и графическое окно с результатами моделирования в текстовыйИредактор MS Word.
Моделирование технических систем, описываемых системами алгебраических уравнений
Упражнение 7. Сформировать структурную схему системы, генерирующую фигуру эллипса на экране виртуального двухкоординатного осциллографа CSCOPXY на основе параметрического задания уравнения эллипса:
x(t)=A∙sin(ω∙t); y(t)=B∙cos(ω∙t).
Значения параметров системы уравнений принять равными A=5; B=2; ω=π/5. Конечное время моделирования принять равным 15,5 с.
11
Упражнение 8. Сформировать структурную схему системы, генерирующую фигуру спирали на экране виртуального двухкоординатного осциллографа CSCOPXY на основе параметрического задания математической модели спирали:
x(t)=(10–t)∙sin(0,4∙π∙t); y(t)= (10–t)∙cos(0,4∙π∙t).
Конечное время моделирования принять равным 18,2 с. Упражнение 9. Построить структурную схему генератора системы
базисных функций
s |
k |
(t) e kt 4 |
. |
|
k 0 |
|
|
В зуал з ровать результаты моделирования. Конечное время моде- |
|||
лирован |
|
|
|
лирован я пр нять равным 11,7 с. |
|
||
СУпражнен е 10. Построить структурную схему генератора системы |
|||
базисных функц й |
|
|
|
sk (t) sin(k t),cos(k t) k4 0 . |
|||
бА |
|||
В зуал з ровать результаты моделирования. Конечное время моде- |
|||
я пр нять равным 9,6 с. |
|
||
Упражнен е 11. Построить структурную схему генератора системы |
|||
базисных функц й |
|
|
|
sk(t)={1, t, sin(t)}.
Визуализировать результаты моделирования. Конечное время моделирования принять равным 12,2 с.
Упражнение 12. Синтезировать структурную схему модели для решения системы линейных алгебраических уравнений
2x1 x2 6,5 0;
x1 2x2 x3 1 0;x2 2x3 0,5 0.
Найти решение системы линейных алгебраических уравнений. Ви- |
|
зуализировать результаты моделирования. Конечное время моделирования |
|
принять равным 8 с. |
Д |
Моделирование технических систем, описываемых системами |
||||||||
|
дифференциальных уравнений |
|||||||
Упражнение 13. Синтезировать структурнуюИсхему модели диффе- |
||||||||
ренциального уравнения третьего порядка |
|
|||||||
|
d3y |
d2 y |
dy |
2 y 0. |
||||
|
|
|
0,5 |
|
|
0,9 |
|
|
|
dt |
3 |
dt |
2 |
dt |
|||
|
|
|
|
|
|
|||
Значения начальных условий принять равными y(0)=3; y'(0)= –1; y''(0)=0. Конечное время моделирования принять равным 10 с. Визуализи-
12
ровать результаты моделирования в виде временных зависимостей. Построить фазовый портрет системы (зависимость y' от y).
Упражнение 14. Синтезировать структурную схему модели дифференциального уравнения второго порядка
|
d2 y |
|
dy |
|
|
|
0,1 |
|
0,5 y 1. |
|
dt2 |
|
||
|
|
dt |
||
Значения начальных условий принять равными y(0)=1; y'(0)= –1. Ко- |
||||
нечное время модел рования принять равным 10 с. Визуализировать ре- |
||||
зультаты модел рован я в виде временных зависимостей. Построить фазо- |
||
вый портрет с стемы (зависимость y' от y). |
||
техническую |
|
|
СВосстановлен е с стемы линейных алгебраических уравнений, |
||
оп сывающ х |
|
систему, по блочной диаграмме |
экв валентных дифференциальных уравнений |
||
бА |
||
Упражнен е 15. |
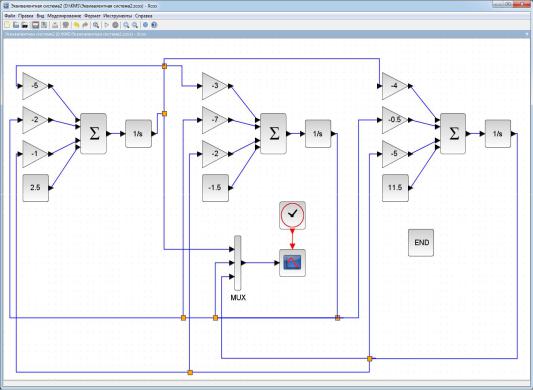
По изо ражению блочной диаграммы модели сис- |
|
темы д фференц альных уравнений (рис. 1.7) восстановить математическую зап сь экв валентной системы линейных алгебраических уравнений.
Д И
Рис. 1.7. Блочная диаграмма модели системы дифференциальных уравнений, эквивалентной системе линейных алгебраических уравнений третьего порядка (к упражнению 15)
13
|
Содержание отчета по лабораторной работе |
|
1. |
Номер работы, название и цель лабораторной работы. |
|
2. Название и назначение основных блоков приложения Xcos пакета |
||
Scilab. |
|
|
С |
|
|
3. |
Номера вариантов индивидуальных заданий (упражнений) по ука- |
|
занию преподавателя. |
||
4. |
Аналитические зависимости математических выражений вариан- |
|
тов инд |
в дуальных заданий и текстовое описание заданий. |
|
5. |
хемы разработанных моделей в обозначениях приложения Xcos |
|
обходимыми |
||
пакета Scilab с необход мыми для их правильного и однозначного воспри- |
||
ятия текстовыми пояснен ями. |
||
6. |
Осц ллограммы визуализации результатов моделирования в виде |
|
временных зав с мостей и при нео ходимости фазовых траекторий с не- |
||
|
б |
|
|
для |
правильного и однозначного восприятия текстовыми |
пояснен ями. |
|
|
7. |
Ответы на контрольные вопросы. |
|
8. |
Вывод по ра оте. |
|
Контрольные вопросы
1.Какие блоки Xcos являются источниками сигналов?
2.Какие блоки Xcos являются получателями (регистраторами) сиг-
налов?
3.Какие блоки Xcos являются непрерывными и какие функции они выполняют?
4.Какие блоки Xcos являются дискретными и какие функции они выполняют?
5.Какие блоки Xcos используются для выполнения математических операций? АД
И
14
Лабораторная работа № 2
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ НАЗЕМНЫХ ТРАН ПОРТНО-ТЕХНОЛОГИЧЕСКИХ КОМПЛЕКСОВ И ИХ ДИНАМИЧЕСКИХ ПОДСИСТЕМ В ПРИЛОЖЕНИИ XCOS СИСТЕМЫ SCILAB
Цели лабораторной работы – изучение математической модели подвески транспортно-технологической машины, построение блочной диаграммы автомоб льной подвески в приложении Xcos пакета Scilab, приобретение практ ческ х навыков по моделированию и оптимизации пара-
метров математ ческой модели автомобильной подвески. |
||
С |
Математическая модель подвески |
|
|
|
|
транспортно-технологической машины |
||
Математ ческое моделирование, на основе которого строится пара- |
||
опт |
|
зац я, является неотъемлемым элементом автоматизи- |
метрическая |
||
рованного проект |
рован я всех технических изделий. В лабораторной ра- |
|
боте в качестве пр мера, иллюстрирующего применение имитационных |
||
бА |
||
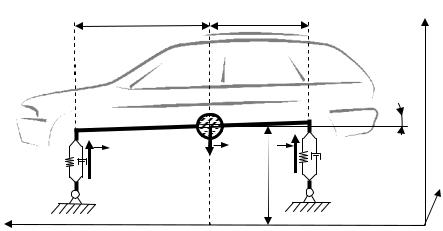
моделей, рассматривается упрощенная математическая модель колебаний подвески транспортно-технологической машины в плоскости ее прямолинейного движения на примере легкового автомобиля. Расчетная схема динамической системы подвески представлена на рис. 2.1.
lf |
|
lr |
|
|
Z0 |
|
|
|
|
|
|
|
|
m |
|
|
θ |
|
|
|
|
|
|
Rf |
Д |
||||
G |
z |
Rr |
cr,kr |
|
|
cf,kf |
|
|
|
|
Y0 |
|
|
|
|
|
|
X0 |
|
|
|
Горизонталь |
O0 |
Рис. 2.1. Плоская упрощенная расчетная схема динамическойИсистемы подвески легкового автомобиля
При составлении математической модели были приняты допущения о том, что рассматриваются только плоские колебания, элементы металлоконструкций автомобиля описываются в виде абсолютно жестких стержней, масса машины сосредоточена в центре масс, элементы подвески представлены двумя телами Фохта передней и задней осей [5, 6].
15