Материал: 1973
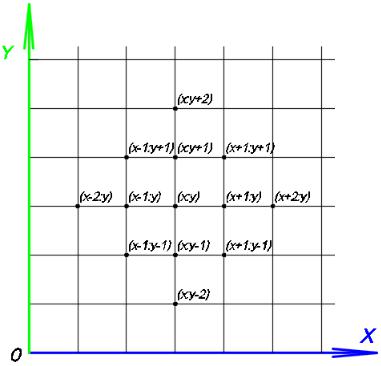
Рис.3.1. Система координат при решении пластин методом конечных разностей в MS Excel
Если толщина пластины меньше 1/5 наименьшего размера основания, то пластина называется тонкой. Тонкие пластины делятся на три вида:
1 – жесткие, при условии, что наибольший прогиб не превышает 1/4 толщины. В случае действия поперечной нагрузки серединная поверхность пластины не испытывает деформаций растяжения или сжатия.
2 – гибкие, при условии, что прогиб больше 1/4, но меньше 5 толщин. При закрепленных краях в серединной поверхности возникают значительные растягивающие или сжимающие напряжения.
3 – абсолютно гибкие (мембраны), когда прогиб превышает толщину в 5 раз и более. При их расчете можно пренебрегать напряжениями изгиба, которые малы по сравнению с напряжениями от растяжения.
Теория изгиба пластин построена на следующих допущениях:
–деформация пластины происходит так, что всякий ее линейный элемент, отнесенный к серединной плоскости, после деформации сохраняет свою длину, остается прямым и параллельным к поверхности, в которую переходит серединная поверхность;
–нормальные напряжения, возникающие на площадках, параллельных к серединной плоскости, принимаются равными нулю, как мало влияющие на состояние равновесия и деформации пластины;
–напряжения в пластине не превосходят предела упругости.
На основании этих допущений получено дифференциальное
уравнение изогнутой поверхности пластины [5].
41
2 2v(x : y) |
4v |
2 |
4v |
|
4v |
|
q |
, |
(3.1) |
|
x 4 |
x 2 y 2 |
y 4 |
D |
|||||||
|
|
|
|
|
|
где v – прогиб произвольной точки серединной поверхности пластины,
q – распределенная нагрузка, перпендикулярная к серединной плоскости пластины,
D – цилиндрическая жесткость пластины, определяемая по формуле
D |
|
Eh3 |
(3.2) |
|
|
|
, |
||
|
||||
|
12(1 2 ) |
|
||
где E – модуль упругости материала пластины (кгс/м2), h – толщина пластины (м),
μ – коэффициент Пуассона.
Для того чтобы уравнение (3.1) представить в конечноразностном виде на прямоугольной пластине, построим сетку (рис.3.2), состоящую из одинаковых ячеек размерами x и y
y – шаг сетки по оси y; x – шаг сетки по оси x.
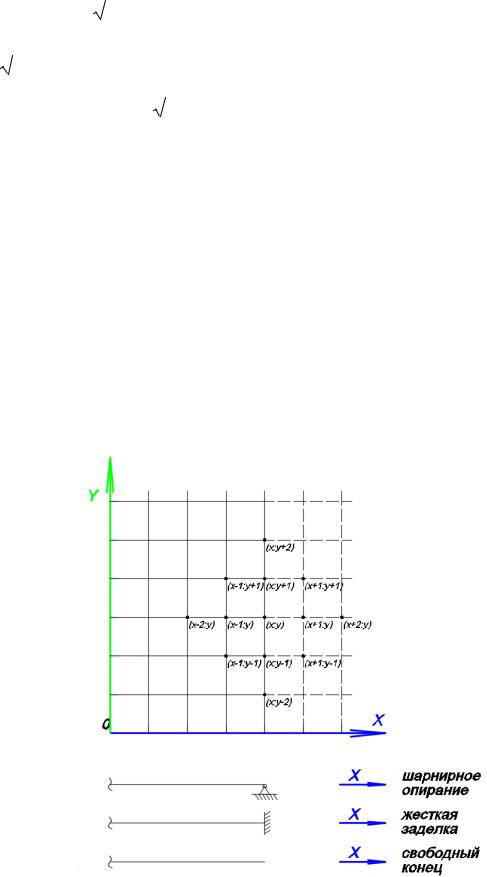
Рис.3.2. Нумерация точек сетки пластины
42
Тогда уравнение (3.1) принимает вид
|
|
1 |
|
|
|
|
|
||
6( |
|
|
) 8 v(x:y) |
|
|
|
|
||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
1 |
|
|
||
4 (1 |
)(v(x 1:y) v(x 1:y) ) (1 |
|
|
)(v(x:y 1) |
v(x:y 1) ) |
||||
|
|||||||||
|
|
|
|
|
|
|
|||
2(v(x 1:y 1) v(x 1:y 1) v(x 1:y 1) v(x 1:y 1) ) |
|
||||||
(v(x 2:y) v(x 2:y) ) |
|
1 |
(v(x:y 2) |
v(x:y 2) ) |
x 2 |
y 2 |
|
|
D |
||||||
|
|
|
|||||
(3.3)
q,
где α= y2/ x2.
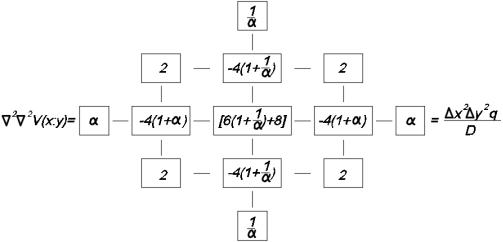
Графически уравнение (3.3) может быть изложено в виде оператора (рис.3.3).
Выделяя из уравнения (3.3) значение прогиба в точке (x:y) и применяя это выражение для всех точек пластины, можно получить систему взаимосвязанных уравнений, которые легко решить в систе-
ме MS Excel.
Рис.3.3. Графическое изображение уравнения 3.3
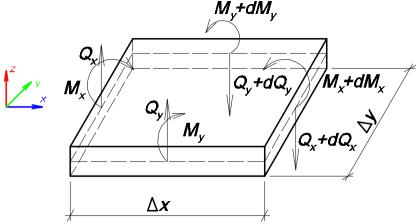
3.1.1. Определение внутренних усилий
Если решение дифференциального уравнения (3.1) в виде v=f(x:y), то изгибающие моменты, приходящиеся на единицу длины сторон пластины, (рис.3.4) параллельных оси (Y) Mx, оси (X) My, а так же крутящий момент Mxy определяется по формулам
M |
|
D( |
2 v |
|
2 v |
); |
(3.4) |
||
x |
|
|
|
||||||
x |
2 |
y 2 |
|||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
||||
43
M |
|
D( |
2 v |
|
2 v |
|
); |
(3.5) |
||||
y |
|
|
|
|
|
|||||||
y |
2 |
x 2 |
|
|||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
M xy D(1 ) |
2 v |
|
. |
(3.6) |
||||||||
x y |
||||||||||||
|
|
|
|
|
|
|
|
|
||||
Рис.3.4. Расчетная схема для определения внутренних усилий в пластине
Поперечные усилия (параллельные оси Z), отнесенные к единице длины сторон, параллельных осям X и Y, определяются по формулам
|
|
|
|
|
|
|
Q |
D |
2v |
|
|
D( |
3v |
|
|
(2 ) |
d 3v |
); |
|
|
|
(3.7) |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
x |
|
|
|
x |
|
|
|
x3 |
|
x y2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
Qy D |
2v |
|
D( |
3v |
|
(2 ) |
d 3v |
|
). |
|
|
|
(3.8) |
||||||||||
|
|
|
|
|
y |
|
y x2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y3 |
|
|
|
|
|
|
|
||||||||
|
|
|
В конечно-разностном виде уравнения (3.4) – (3.8) для точки |
|||||||||||||||||||||||||||
(x:y) принимают вид [6] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
M |
|
D( |
v( x 1:y) |
2v( x:y) v( x 1:y) |
|
|
v( x:y 1) |
2v( x:y) v( x:y 1) |
); |
(3.9) |
||||||||||||||||||||
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
x 2 |
|
|
|
|
|
|
|
|
|
|
y 2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
M |
|
|
D( |
v( x:y 1) |
2v( x:y) v( x:y 1) |
|
v( x 1:y) |
2v( x:y) v( x 1:y) |
); |
(3.10) |
||||||||||||||||||||
y |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
y 2 |
|
|
|
|
|
|
|
|
|
|
x 2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
M |
|
D(1 ) |
v( x 1:y 1) |
v( x 1:y 1) v( x 1:y 1) v( x 1:y 1) |
; (3.11) |
||||||||||||||||||||||
|
|
|
xy |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4x y |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
44
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
Qx |
|
|
|
|
|
2 (1 )(v(x 1: y) v(x 1: y) ) |
||||||||||
|
|
|
|
|
||||||||||||
|
|
2y |
3 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||||||||
|
(v(x 1: y 1) v(x 1: y 1) v(x 1: y 1) |
|||||||||||||||
|
|
|
|
|
|
|||||||||||
v(x 1: y 1) ) |
(v(x 2 : y) v(x 2 : y) ); |
|||||||||||||||
Q y |
|
|
|
D |
|
|
2(1 )(v |
|
|
|
v |
|
) (v |
|
||
|
|
|
|
|
(x : y 1) |
(x : y 1) |
(x |
|||||||||
|
2y |
3 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
v(x 1: y 1) v(x 1: y 1) v(x 1: y 1) )
(v(x : y 2) v(x : y 2) ).
1: y 1)
(3.12)
(3.13)
3.1.2. Условия опирания пластин
Если уравнение (3.3) рассчитать для предконтурных и контурных точек, то в него войдут прогибы в законтурных точках, то есть расположенных за контуром. Прогибы в законтурных точках приходится выражать через прогибы в точках внутри контура или на контуре, используя граничные условия. Запишем эти условия для произвольной точки (x:y) края пластины (рис.3.5)
а
б
в
Рис.3.5. Определение граничных условий пластины
45