Материал: 1973
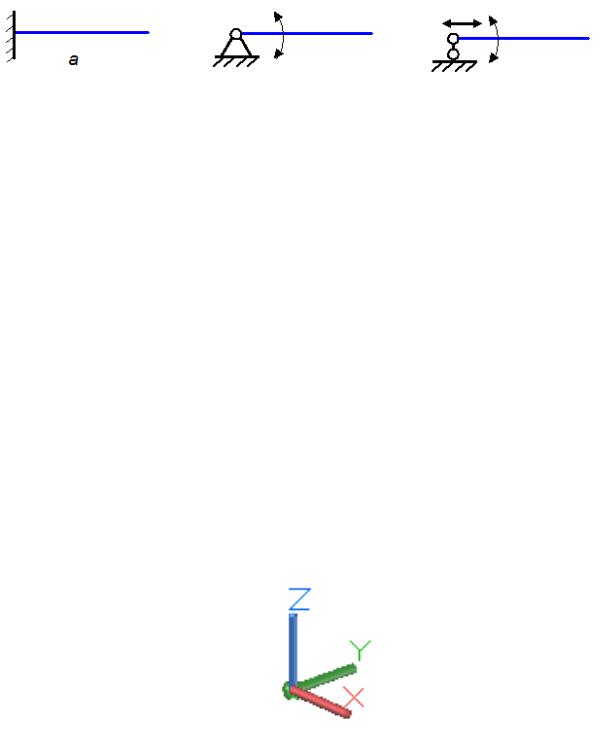
При построении расчетной схемы в первую очередь определяют форму объекта и типы опор. Далее производится анализ и сбор внешних нагрузок. При назначении схем опор руководствуются тремя основными типами (рис. 1.1):
а |
б |
в |
Рис.1.1. Основные типы опор, используемые при составлении расчетных схем:
а– жесткое закрепление (опора); б – шарнирно-неподвижное закрепление (опора);
в– шарнирно-подвижное закрепление (опора)
Жесткое закрепление препятствует как перемещениям, так и повороту объекта в месте закрепления, шарнирно-неподвижное разрешает поворот в опоре, шарнирно-подвижное разрешает поворот и одно перемещение (показаны стрелками). Кроме перечисленных основных типов опор встречаются упругие опоры с заданной жесткостью при линейном или угловом перемещении. Такие опоры могут быть промежуточными или сплошными в виде упругого основания.
При построении теоретических выкладок будем придерживаться правовинтовой или правой декартовой системы координат (рис.1.2). В ней момент силы положителен, если его вектор совпадает с направлением оси вращения (поступательное движение правого буравчика при его вращении моментом совпадает с направлением оси, при этом принято наименование оси ставить в виде индекса момента, например
Mx, My).
Правовинтовая система координат – если смотреть с конца оси, например z на плоскость xy, то относительный ближайший поворот осей в алфавитном порядке (x к y относительно оси z) происходит против часовой стрелки (рис.1.2).
Рис.1.2. Правая система координат
6
При выявлении и учете внешних нагрузок принято разделять их следующим образом:
–объемные силы приложены к каждой частице тела по всему его объему (собственный вес тела, силы инерции – q, кгс/м3, Н/мм3);
–распределенные по площади (площадь, по которой переда-
ется нагрузка, соизмеримая с площадью тела, обозначение и единицы измерения – q, кгс/м2, Н/мм2);
–распределенные по длине или погонные нагрузки (длина площадки контакта значительно превышает ее ширину, обозначение и единицы измерения – q, кгс/м, Н/мм);
–сосредоточенные силы ( площадь, по которой передается нагрузка несоизмеримо мала в сравнении с площадью тела, обозначение
иединица измерения – Р, кгс, Н).
1.3.Внутренние силы
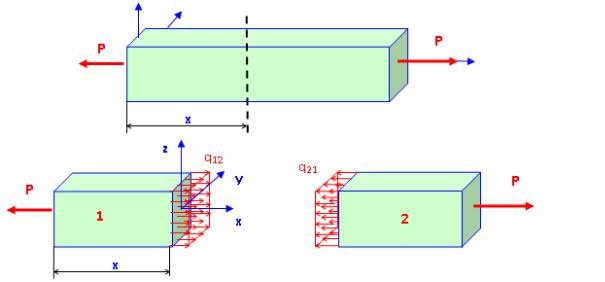
Внутренние силы [1,2] – поверхностные силы, действующие между двумя частями одного и того же нагруженного тела. Проиллюстрируем это понятие на примере бруса постоянного по длине прямоугольного сечения площадью A, растянутого силами Р, ориентированными по оси, проходящей через центры тяжести нормальных сечений бруса (рис. 1.3, а).
а
б
Рис. 1.3. Внутренние силы при растяжении бруса
На расстоянии x от начала глобальной системы координат мысленно рассечем брус плоскостью, перпендикулярной оси бруса
7
(рис. 1.3, б). Для того чтобы первая и вторая части оставались в равновесии, в плоскостях сечений должны быть приложены силы, в первом приближении равномерно распределенные по плоскости сечений и равные: q12 = q21 = P/А. Очевидно, что рассматриваемые внутренние силы ориентированы нормально сечению, то есть вдоль линии действия сил Р или по оси x.
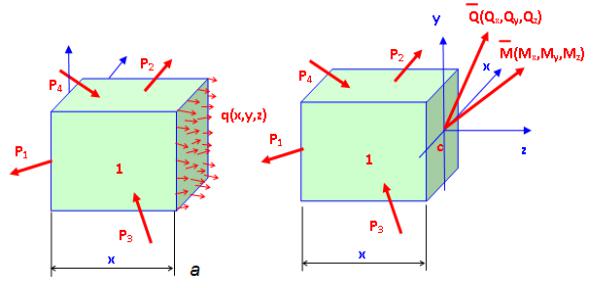
В общем случае нагружения, когда тело находится в равновесии под действием n заданных сил, внутренние силы q в каждой точке (x, z) плоскости сечения x имеют свое направление и величину (рис.1.4, а). Если методами теоретической механики привести все внутренние силы к центру тяжести сечения с, то получим главный вектор и главный момент внутренних сил, которые в проекциях на текущую систему координат дают по три составляющих: Qx, Qy, Qz, Mx, My, Mz (рис.1.4, б). Перечисленные шесть параметров принято называть внутренними силовыми факторами или внутренними силами. Применительно к стержневым системам внутренние силовые факторы имеют следующие названия:
-Qx – продольная сила (нормальная сила N);
-Qz, Qy – поперечные силы;
-Mz, My – изгибающие моменты;
-Mx – крутящий момент (Мк).
а |
б |
Рис. 1.4. Главный вектор и главный момент внутренних сил
Из рис. 1.4 следует, что проекции главного вектора и момента внутренних сил на оси текущей системы координат уравновешиваются соответствующими проекциями внешних сил, приложенных к отсеченной части 1. Таким образом, внутренние силы в заданном сече-
8

нии x можно определить по известным внешним силам, приложенным к левой (первой) части стержня
n
Qx(x) = - ( Pix ),
i 1 n
Qy(x) = - ( Piy ),
i 1 n
Qz(x) = - ( Piz ),
i 1 n
Mx(x) = - ( M ix ),
i 1 n
My(x) = - ( M iy ),
i 1 n
Mz(x) = - ( M iz ),
i 1
где n – количество внешних сил, действующих на первую часть стержня (см. рис.1.4, а).
1.4. Понятие о напряжениях и деформациях. Закон Гука
Количественной характеристикой распределения внутренних сил по сечению нагруженного стержня является механическое напряжение [1,2]. Вблизи точки сечения А (y;z) выделим бесконечно малую площадку A, на которой действует вектор внутренних сил q (рис.1.5). Отношение
q рсрA
называется вектором среднего полного напряжения на площадке. Если устремить величину площадки к нулю, то получим вектор полного напряжения в точке А(y;z) сечения x
lim( A 0) q p .
F
Напряжение имеет размерность Н/м2 = Па. Один паскаль (1Па) является малой величиной, определяющей, с какой интенсивностью действует на плоскость сила, равная 1 Н, равномерно распределенная по площади 1 м2. Поэтому на практике используют понятие 1МПа = 1·106 Па. В инженерной практике используются кгс/м2, тс/м2.
9
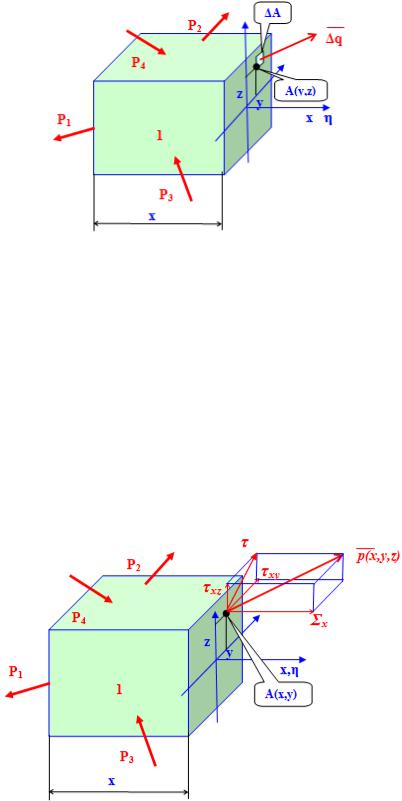
Рис. 1.5. Вектор внутренних сил на бесконечно малой площадке
Напряжением называется интенсивность действия внутренних сил в точке тела или внутреннее усилие, приходящееся на единицу площади [1,2].
Вектор полного напряжения p в проекциях на нормаль η и
плоскость сечения дает нормальное σ и полное касательное τ напряжения. В то же время полное касательное напряжение имеет две составляющие в проекциях на оси в плоскости сечения. Так, если сечение проведено перпендикулярно оси x, совпадающей в данном случае с нормалью сечения η, компонентами вектора полного напряжения будут нормальное напряжение σx и касательные напряжения τxy, τxz
(рис.1.6).
Рис.1.6. Проекции полного напряжения в точке сечения с нормалью, совпадающей с осью x
10