Материал: 1973
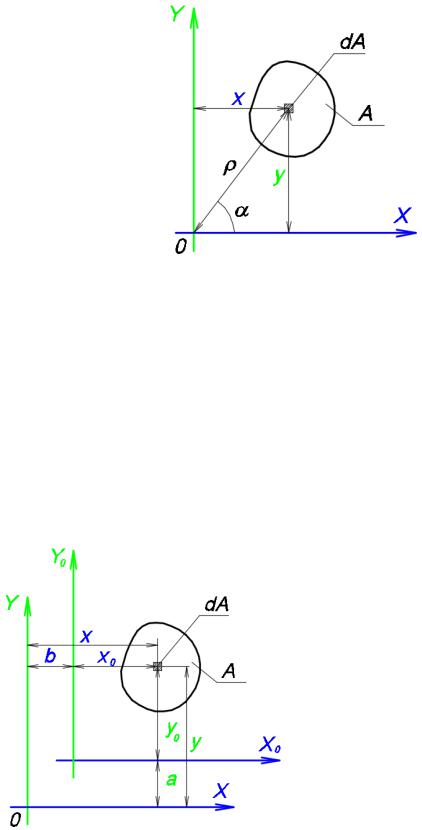
Осевые моменты инерции всегда положительные. Центробежный момент может быть как больше нуля, так и меньше нуля и равным нулю. Оси, относительно которых центробежный момент инерции равен нулю, называются главными осями инерции сечения. Оси симметрии всегда являются главными. Полярный момент инерции равен сумме осевых моментов инерции (рис. 1.13).
Рис. 1.13. Связь полярных и декартовых координат элементарной площадки
I |
2 dA (x2 y 2 )dA x2 dA y 2 dA I x I y . |
|||
|
A |
A |
A |
A |
1.9. Моменты инерции относительно параллельных осей
Рассмотрим изменение момента инерции при параллельном переносе осей координат (рис. 1.14),
Рис. 1.14. Момент инерции относительно параллельных осей
где x, y – исходные оси координат, x1, y1 – перенесенные оси координат.
16
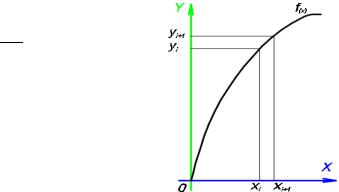
y0 = y – a; x0 = x – b.
По определению
I x ( y0 a)2 dA y02dA 2a y0dA a2 dA
A A A A
I x0 a2 A 2aSx0;
I y (x0 b)2 dA x02dA 2b x0dA b2 dA
A A A A
I y0 b2 A 2bS y0,
где Sx0 = 0, Sy0 = 0 как статические моменты относительно централь-
ных осей y0, x0.
Таким образом, формулы для моментов инерции для параллельно перенесенных осей имеют вид
I x I x0 a2 A;
I y I y0 b2 A.
Момент инерции относительно любой оси равен моменту инерции относительно центральной оси, параллельной данной, плюс произведение площади сечения на квадрат расстояния между осями.
1.10. Понятие о производной
Производной от функции (f) в точке x называется предел отношения ее приращения y в этой точке к соответствующему приращению аргумента x, когда последнее стремится к нулю (рис.1.15)[4],
f (x) lim x 0 yx ,
где f (x) – производная функции в точке x
y = yi+1 - yi – приращение функции, x = xi+1 - xi – приращение аргумента.
Рис. 1.15. Производная функции в точке х
17

То есть производная функции показывает приращение функции на бесконечно малом участке.
Также употребляются другие обозначения: dy/dx, y/. Если записать производную в виде
dy |
|
yi 1 yi |
|
yi 1 yi |
, |
|
xi 1 xi |
|
|||
dx |
|
|
x |
||
то такая запись называется конечно-разностной.
1.11. Производные высших порядков
Если на каком-либо интервале задана функция f и эта функция имеет производную, то может случиться, что производная функции также на этом интервале будет иметь производную [4].
Эта последняя производная будет называться производной от функции f второго порядка и обозначаться
f (x) d 2 y y . dx2
Таким образом, производной от функции f порядка n называется первая производная от производной порядка n-1 и обозначается
|
|
|
|
|
|
|
|
|
f (n) (x) ( f (n 1) (x)) |
d n y |
|
y (n) . |
||||||||||||||||
|
|
|
|
|
|
|
|
dxn |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Если записать производную второго порядка в конечно- |
||||||||||||||||||||||||||||
разностном виде, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
d |
2 |
y |
|
|
|
|
2 yi yi 1 |
|
|
|
||||||||||
|
|
f |
|
|
f i (x) |
f i 1 (x) |
|
yi 1 |
. |
|
|
|||||||||||||||||
|
|
dx2 |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
x |
x 2 |
|||||||||||||||||
Соответственно получим производную третьего порядка |
||||||||||||||||||||||||||||
|
|
|
|
d |
3 |
y |
|
|
|
|
|
(x) |
|
yi 1 3yi 3yi 1 yi 2 |
|
|
||||||||||||
f |
|
|
|
f i (x) |
f i 1 |
|
. |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|||||||||||||||
|
|
|
|
dx3 |
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
|||||||||||
Далее получим производную третьего порядка |
||||||||||||||||||||||||||||
|
d |
4 |
y |
|
|
|
|
|
|
|
|
|
(x) |
|
yi 2 4 yi 1 |
6 yi 4 yi 1 yi 2 |
|
|||||||||||
f IV |
|
|
f i (x) f i 1 |
|
. |
|||||||||||||||||||||||
|
dx4 |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
x 4 |
||||||||
18
Контрольные вопросы и задания к главе 1
1.Что такое прочность, жесткость, деформация и упругость конструкции?
2.Объясните смысл основных допущений и гипотез сопротивления материалов.
3.Объясните, в чем заключается отличие реального объекта от расчетной схемы.
4.Что такое внутренние силы?
5.Что такое напряжение?
6.Закон Гука, в чем его смысл?
7.Как определяется положение центра тяжести сечения?
8.Что такое момент инерции сечения?
9.Что такое производная функции?
10. Что такое производная функции высших порядков?
19
2. МЕТОД НАЧАЛЬНЫХ ПАРАМЕТРОВ
Метод начальных параметров – это способ решения дифференциальных уравнений, при котором неизвестными параметрами являются значения функции и ее производных в начале координат.
2.1.Построение полной математической модели изгиба
ирастяжения стержня при больших перемещениях при решении
задач методом начальных параметров
2.1.1. Геометрические соотношения
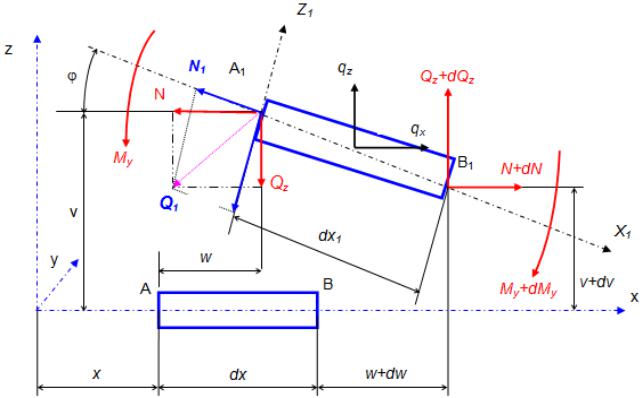
На рис. 2.1 изображено положение отрезка dx стержня с координатой x, отмеренной от левого конца стержня до нагружения, и положение того же отрезка длиной dz1 после нагружения распределенной по длине нагрузкой qx, qz,
Рис. 2.1. Положение элемента стержня до и после нагружения
где v, w – перемещения оси стержня по оси z и x соответственно; φ – угол поворота сечения относительно оси y.
Проектируя замкнутый контур АА1ВВ1А на оси x и z, получаем два геометрических соотношения
dv dx1 sin (v dv) 0 0,
20