Материал: 1973
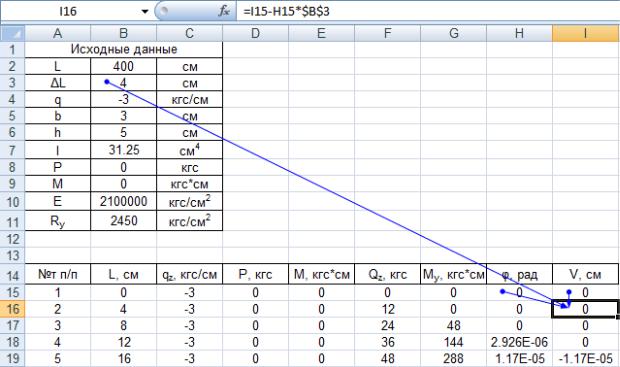
Рис.2.13. Запись расчетной формулы для вертикальных перемещений
Врезультате получаем взаимосвязанную систему дифференциальных уравнений.
Дальнейшее решение происходит при помощи процедуры «Поиск решения» (рис.2.14), которая добавляется в рабочее меню через «Параметры Excel», графа «Надстройки».
Воткрывшемся окне «Поиск решения» требуется указать изменяемые и целевые ячейки.
Поскольку в начале координат располагается шарнирная опора,
то вертикальное перемещение на опоре равно нулю V1=0, а также момент равен нулю My=0. Данные значения напрямую вводятся в первые ячейки вертикальных перемещений и изгибающего момента. Поперечная сила и угол поворота являются неизвестными параметрами. Таким образом, изменяемыми ячейками будут Qz1, φ1.
Поскольку на конце жесткая заделка, то V101 = 0 и φ101 = 0. Эти значения и будут целевыми. Поскольку в окне «Поиск решения» в ка-
честве целевой ячейки можно указать только одно значение, то второе пойдет как дополнительное ограничение.
36
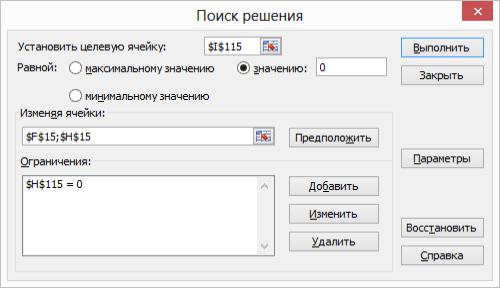
Рис.2.14. Окно процедуры «Поиск решения»
При запуске процедуры «Поиск решения» Excel будет автоматически подбирать значения поперечного усилия и угла поворота в начале до тех пор, пока не выполнятся граничные условия, описанные целевой ячейкой и дополнительным ограничением.
В результате расчета получены следующие данные, которые записаны в табл. 2.6 и на рис. 2.15.
Таблица 2.6
Итоговые данные
№т п/п |
L, см |
qz, кгс/см |
P, кгс |
М, кгс*см |
Qz, кгс |
My, кгс*см |
φ, рад |
V, см |
1 |
0 |
-3 |
0 |
0 |
-441,0 |
0 |
0,0591 |
0 |
2 |
4 |
-3 |
0 |
0 |
-429,0 |
-1764,0 |
0,0591 |
-0,2365 |
3 |
8 |
-3 |
0 |
0 |
-417,0 |
-3480,0 |
0,0590 |
-0,4730 |
4 |
12 |
-3 |
0 |
0 |
-405,0 |
-5148,0 |
0,0588 |
-0,7092 |
5 |
16 |
-3 |
0 |
0 |
-393,0 |
-6768,0 |
0,0585 |
-0,9444 |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
95 |
376 |
-3 |
0 |
0 |
686,9 |
43991,5 |
-0,0186 |
-0,2733 |
96 |
380 |
-3 |
0 |
0 |
698,9 |
46739,5 |
-0,0159 |
-0,1987 |
97 |
384 |
-3 |
0 |
0 |
710,9 |
49535,5 |
-0,0131 |
-0,1348 |
98 |
388 |
-3 |
0 |
0 |
722,9 |
52379,5 |
-0,0101 |
-0,0823 |
99 |
392 |
-3 |
0 |
0 |
734,9 |
55271,5 |
-0,0069 |
-0,0418 |
100 |
396 |
-3 |
0 |
0 |
746,9 |
58211,5 |
-0,0035 |
-0,0141 |
101 |
400 |
-3 |
0 |
0 |
758,9 |
61199,5 |
-1E-06 |
-1,5E-14 |
37
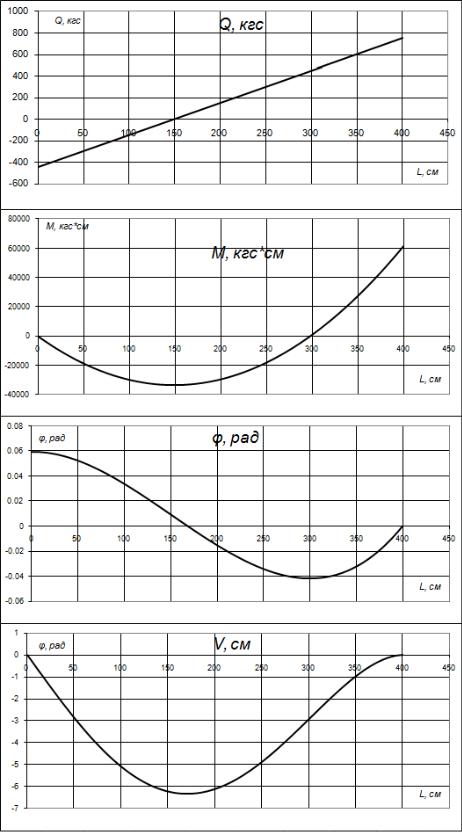
Рис.2.15. Эпюры поперечных сил Qz, изгибающего момента My, угла поворота φ, вертикальных перемещений V
38
Контрольные вопросы и задания к главе 2
1.В чем заключается суть расчета конструкций методом начальных параметров?
2.В чем отличие расчета стержней при больших и малых перемещениях?
3.Как происходит описание граничных условий при жестком закреплении стержня?
4.Как происходит описание граничных условий при шарнирном закреплении (подвижный и неподвижный шарниры) стержня?
5.Как происходит описание граничных условий при свободном конце стержня?
6.Что такое целевая и изменяемая ячейки в процедуре «Поиск решения»?
7.Что такое дополнительное ограничение в процедуре «Поиск решения»?
8.Что такое конечно-разностный вид производной функции?
9.В чем отличие сосредоточенной нагрузки от распределенной?
10.Какая зависимость существует между нагрузкой, поперечной силой, изгибающим моментом, углом поворота сечений и вертикальными перемещениями?
39
3. МЕТОД КОНЕЧНЫХ РАЗНОСТЕЙ (МКР)
Идея метода конечных разностей (МКР) известна давно, с соответствующих трудов Эйлера. Однако практическое применение этого метода было тогда весьма ограничено из-за огромного объема ручных вычислений, связанных с размерностью получаемых систем алгебраических уравнений, на решение которых требовалось огромное количество времени. В настоящее время с появлением быстродействующих компьютеров этот метод стал удобен для практического использования и является одним из наиболее эффективных при решении различных задач по расчету и проектированию строительных конструкций.
Основная идея МКР для приближенного численного решения краевой задачи дифференциального уравнения состоит в том, что:
-элемент разбивается сеткой с определенным шагом s, строится сеточная область, которая является приближением элемента;
-дифференциальное уравнение изогнутой поверхности элемента заменяется соответствующим конечно-разностным уравнением;
-с учетом граничных условий устанавливаются значения искомых решений в граничных узлах элемента.
Выбор сеточной области зависит от конкретной задачи, но всегда надо стремиться к тому, чтобы контур сеточной области наилучшим образом аппроксимировал решаемый элемент.
В данном учебном пособии рассмотрим способ решения пластин и стержней методом конечных разностей.
3.1.Расчет прямоугольных пластин методом конечных разностей
Пластиной называется тело призматической формы, у которой толщина мала по сравнению с двумя другими размерами.
Плоскость, равноудаленная от оснований пластины (делящая толщину пластины пополам), называется серединной плоскостью
(рис. 3.1).
По конфигурации основания пластины различают прямоугольные, трапециевидные, секториальные, круглые и т.д.
40