Материал: ТАУLAB
-
Создание модели одноконтурной системы с последовательной коррекцией
С помощью программы математического моделирования MATLAB – Simulink произведем моделирование переходных процессов одноконтурной системы с последовательной коррекцией. Для этого, прежде всего, необходимо создать модель исследуемой САР. При создании модели в соответствии со структурной схемой САР необходимо использовать следующие блоки Simulink:
1.Мультиплексор (смеситель) Mux из раздела Signal Routing
Назначение: объединяет входные сигналы в вектор(cм.Л.р.№2).
2. Генератор ступенчатого сигнала Step из раздела Sources - источники сигналов.
Назначение: формирует ступенчатый сигнал(см. Л.р.№1).
3. Блок передаточной функции Transfer Fcn из раздела Continuous – аналоговые блоки.
Назначение: блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов(см. Л.р.№1).
Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет также скалярным (как и входной сигнал).
4. Осциллограф Scope из раздела Sinks - приемники сигналов.
Назначение: строит графики исследуемых сигналов в функции времени. Позволяет наблюдать за изменениями сигналов в процессе моделирования(см. Введение).
5. Блок вычисления суммы Sum из раздела Math – блоки математических операций.
Назначение: выполняет вычисление суммы текущих значений сигналов(см. Л.р.№1).
Создание модели в среде Simulink.
Для исследования одноконтурной САР в окне модели Simulink создаётся два типа моделей:
-
Модель замкнутой системы с последовательной коррекцией при оптимальной настройке регулятора и модульному оптимуму и разомкнутой части системы из последовательно соединённых звеньев Wо1(р) и Wф(р) представленную на рис. 4.4;
-
Модель одноконтурной САР с последовательной коррекцией при различной настройке регулятора:
-
при изменении постоянной времени Тр регулятора;
-
при изменении постоянной времени Тр1 регулятора.
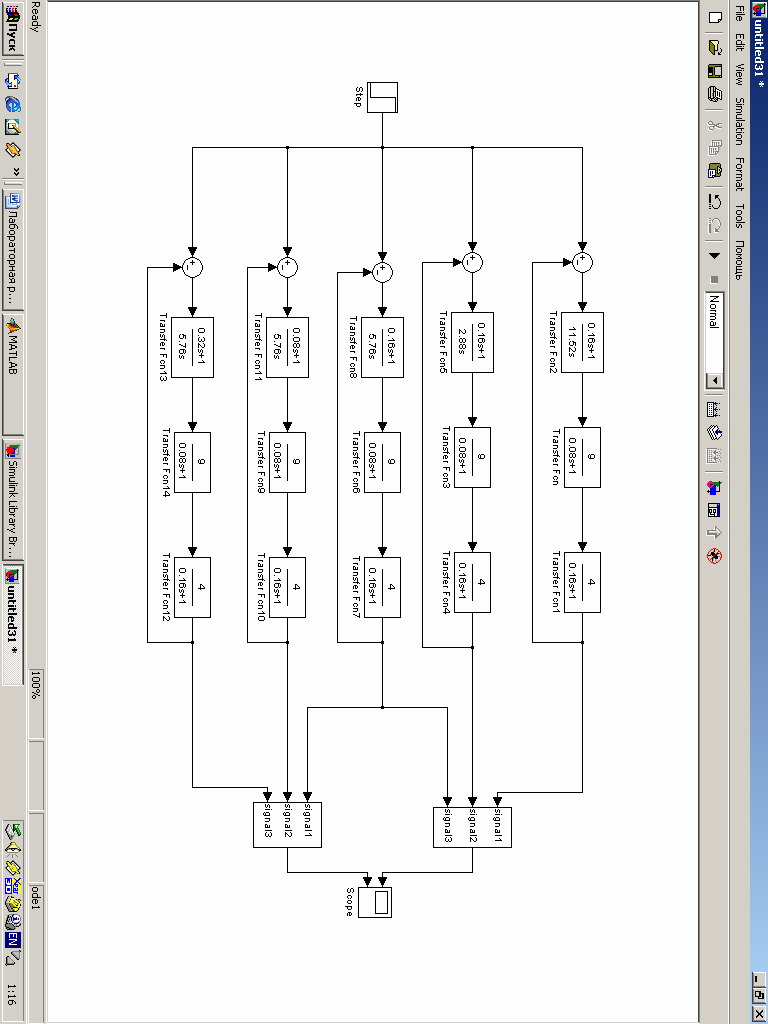
Схемы моделей представлены на рис.4.5.
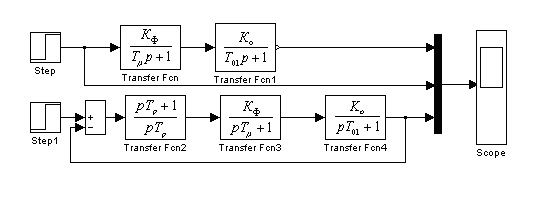
Рис. 4.4 Модель объекта регулирования и одноконтурной оптимальной замкнутой системы регулирования

-
Расчёт переходных процессов по методу компьютерного моделирования
После создания модели исследуемой САР производится расчёт и установка параметров модели отдельных звеньев САР в соответствии с заданием преподавателя. Расчёт параметров представляется в таблице 4.1.
Примечание: В учебном пособии в качестве примера приняты следующие параметры звеньев САР: Кф=9; Тμ=0.08с; К0=4; Т01=0.16с.
При выполнении же лабораторных работ параметры звеньев объекта регулирования берутся из задания на курсовую работу [таблица 4.1] либо могут быть заданы преподавателем.
Таблица 4.1 Расчёт параметров звеньев модели САР.
|
№ варианта |
Тр1,с |
Тр,с |
Кф |
Тμ |
К0 |
Т01 |
|
1 |
Т01 |
2Тμ∙ Кф ∙ К0 |
|
|
|
|
|
2 |
Т01 |
Тμ∙ Кф ∙ К0 |
|
|
|
|
|
3 |
Т01 |
4Тμ∙ Кф ∙ К0 |
|
|
|
|
|
4 |
0.5∙Т01 |
2Тμ∙ Кф ∙ К0 |
|
|
|
|
|
5 |
2∙Т01 |
2Тμ∙ Кф ∙ К0 |
|
|
|
|
Расчёт переходных процессов с использованием первой модели (рис.4.4) позволяет:
-
уяснить возможность компенсации больших постоянных времени с помощью регуляторов оптимально-настроенных прямых по мобильному оптимуму;
-
получить показатели качества одноконтурной системы регулирования. Кривые переходных процессов с заданными параметрами звеньев представлены на рис. 4.6. Запустив модель и дважды щёлкнув на блоке Scope первой модели, получим кривые переходных процессов разомкнутой схемы объекта регулирования (кривая 1) и замкнутого оптимального контура (кривая 2).
С целью проверки полученной в результате расчёта кривой оптимального переходного процесса можно применить аналитический метод с помощью выражения, полученного применением обратного преобразования Лапласа к передаточной функции оптимального разомкнутого и замкнутого контуров
![]() ,
,
![]() .
.
Т.е.
![]() .
.
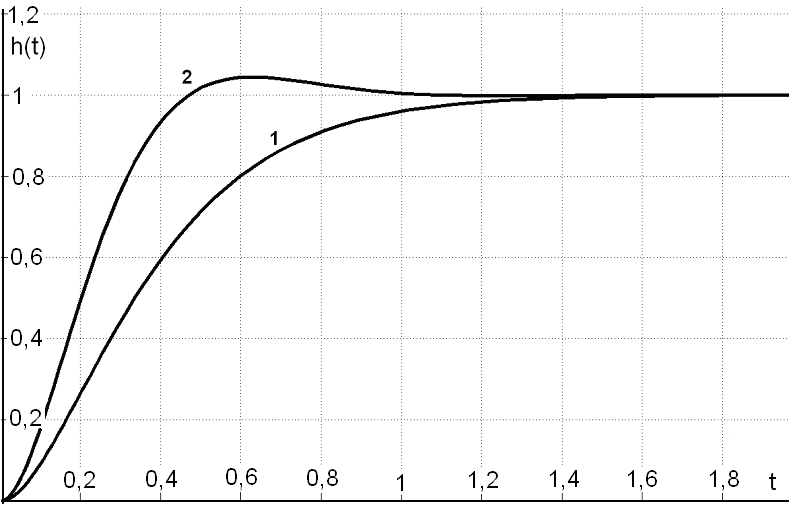
Рис. 4.6 Переходный процесс оптимально построенной по модульному оптимуму одноконтурной САР
Расчет данных для построения кривой переходного процесса представлен в таблице 4.2.
Таблица 4.2 Расчет переходной функции h(t)
|
Т |
0 |
0.04 |
0.08 |
0.12 |
0.16 |
0.2 |
0.24 |
0.28 |
0.32 |
0.36 |
0.4 |
0.44 |
0.48 |
|
h(t) |
0 |
0.177 |
0.492 |
0.762 |
0.933 |
1.017 |
1.042 |
1.039 |
1.026 |
1.013 |
1.005 |
1 |
0.998 |
Кривая переходного процесса h(t) замкнутой САР представлена на рис.4.3.
При исследовании второй модели (рис. 4.5) одноконтурной САР с использованием параметров звеньев, заданных в таблице 4.1 получены две серии графиков (при принятых ранее параметрах звеньев):
-
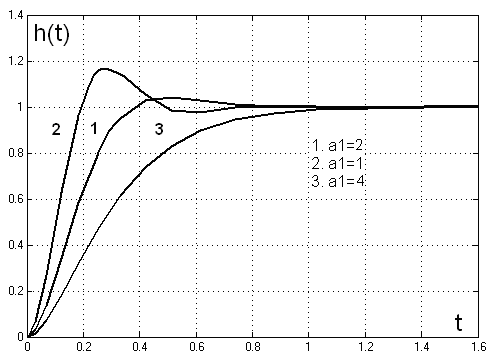
при изменении постоянной времени интегрирования Тр при Тр1=const (рис. 4.7,а):
![]()
![]()
![]()
![]()
![]()
![]()
-
Исследование динамических свойств контура регулирования на matlab.
-
Control System Toolbox
Динамические свойства контуров регулирования САР могут быть исследованы с помощью комплекта инструментальных средств "Control System"- набора функций MATLAB для моделирования, анализа и проектирования автоматических систем управления. Функции в этом комплекте инструментальных средств работают с широко распространенной классической передаточной функцией и "современными" методами управления в пространстве состояний. С помощью этих инструментальных средств можно моделировать и анализировать системы как в дискретной, так и в непрерывной областях. Графики временных характеристик и корневого годографа могут быть быстро вычислены и построены.
Возможности библиотеки
Системное моделирование(System Models):
-
Описание дискретных и непрерывных систем.
-
Пространство состояний, функции преобразования, полюса и нули, элементарные модели в виде передаточных функций.
-
Построение линейной модели системы.
-
Модельные преобразования: из дискретной в непрерывную область, модель пространства состояний к передаточной функции и другим моделям.
Анализ (Analysis):
-
Функции временных характеристик: импульсная ПФ, зависимость от периода дискретизации, переходная характеристика, обобщенное линейное моделирование.
-
Функции частотных характеристик: Боде, Николса, графики сингулярных значений.
Моделирование объекта управления (Control Design):
-
Оптимизация обратной связи: выбор коэффициентов демпфирования, запас устойчивости по фазе и амплитуде, расположение полюсов, корневой годограф, интерактивное определение усиления, LQR/LQE проект.
-
Реализационная модель: управляемость, реализация с использованием минимального количества компонент математической модели, модель с корректирующим устройством, уменьшение порядка модели.
-
Свойства модели: наблюдаемость и управляемость Грамиана, наблюдаемость и управляемость матрицы, нули передачи, уравнение Ляпунова, отклик на ковариацию.
-
Последовательность выполнения работы
В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде комплексной передаточной функции. Синтаксис команды, создающий LTI-систему c одним входом и одним выходом в виде передаточной функции:
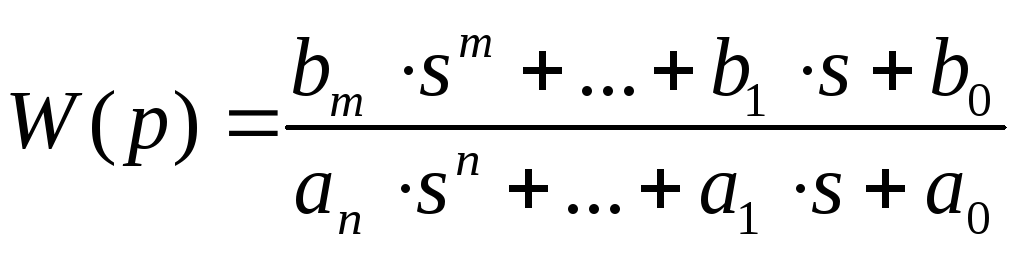
TF([bm, …, b1, b0], [an, …, a1, a0]),
где bm, …, b1 – значения коэффициентов полинома В в (1.3);
an, …, a1 – значения коэффициентов полинома A в (1.3).
Для выполнения работы могут применяться команды, приведенные в таблице 4.3
Для определения корней полиномов степени k, может, также, применяться команда MATLAB roots(P), которая, в качестве аргумента P, получает матрицу коэффициентов полинома [pk, …, p0].
Другим вариантом получения графиков динамических характеристик САУ является использование графического интерфейса ППП CST – LTI viewer, вызов которого осуществляется командой ltiview, которой в качестве параметра можно указать имя переменной, содержащей LTI-объект.
Таким образом, выполнение лабораторной работы состоит из следующих шагов:
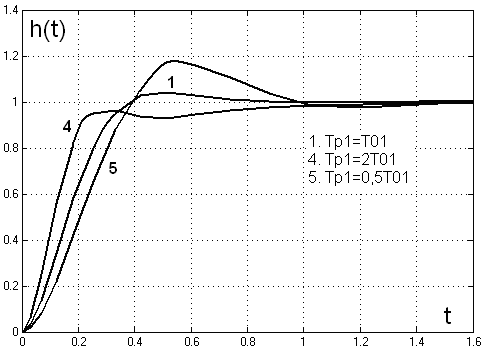
2) при изменении постоянной времени обратной связи регулятора Тр1 при Тр=const (рис. 4.7,б):
![]()
![]()
![]()
![]()
![]()
![]()
Результаты расчетов представляются как в виде графиков, так и таблиц.
а)
б )
Рис. 4.7 Кривые переходных процессов в одноконтурных
САР при изменении параметров регулятора: а)- при изменении Tp;
б) - при изменении Tp1
По полученным кривым переходных процессов определяются динамические показатели качества одноконтурных САР с последовательной коррекцией, представленных в таблице 4.2:
![]() -
время установления, т.е. достижения в
первый раз установив- шегося значения;
-
время установления, т.е. достижения в
первый раз установив- шегося значения;
![]() -
время максимального перерегулирования;
-
время максимального перерегулирования;
![]() -
относительное время регулирования(время
переходного процесса) достижения
y=0.98∙yуст;
-
относительное время регулирования(время
переходного процесса) достижения
y=0.98∙yуст;
σ%=![]() - перерегулирование;
- перерегулирование;
f=![]() - частота колебаний;
- частота колебаний;
Tп – период колебаний;
ω=2πf – угловая частота колебаний.
По полученным показателям качества делаются выводы о влиянии на настройку регулятора изменения его параметров.